同步电机主要控制方法(含SynRM与PMSM)
一、矢量控制
1.最大转矩/电流比控制——MTPA
这是在定子电流最优控制问题在恒转矩控制下提出的控制方法。
已知PMSM转矩方程为 T e = p [ Ψ f i q + ( L d − L q ) i d i q ] T_e=p[\Psi_fi_q+(L_d-L_q)i_di_q] Te=p[Ψfiq+(Ld−Lq)idiq],可以转换成将电感值进行标幺值变换可得转矩方程形式为 T e = p [ e 0 i s sin β + 1 2 ( 1 − ρ ) x d i s 2 sin 2 β ] , β T_e=p[e_0i_s\sin\beta+\frac{1}{2}(1-\rho)x_di_s^2\sin2\beta],\beta Te=p[e0issinβ+21(1−ρ)xdis2sin2β],β为定子电流矢量角。
对上式求极小值,即 ∂ T e ∂ i s = 0 , \frac{\partial T_e}{\partial i_s}=0, ∂is∂Te=0,可得 β = π 2 + arcsin [ − e 0 + e 0 2 + 8 ( ρ − 1 ) 2 x d 2 i s 2 4 ( ρ − 1 ) x d i s ] 。 \beta=\frac{\pi}{2}+\arcsin[\frac{-e_0+\sqrt{e_0^2+8(\rho-1)^2x_d^2i_s^2}}{4(\rho-1)x_di_s}]。 β=2π+arcsin[4(ρ−1)xdis−e0+e02+8(ρ−1)2xd2is2]。
由于受到电流极限圆的限制,即 i d 2 + i q 2 ⩽ i s m a x 2 i_d^2+i_q^2\leqslant i_{smax}^2 id2+iq2⩽ismax2,所以在电流极限圆内的最大转矩/电流比轨迹部分便是矢量控制过程中的变化。
如图所示
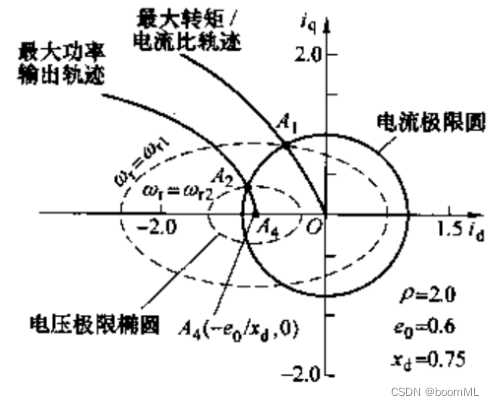
其中的最大转矩/电流比轨迹的生成过程
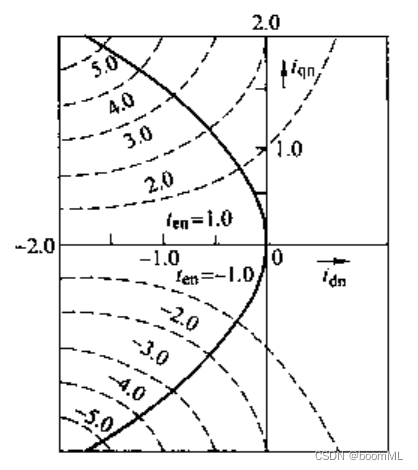
对于虚线部分为定子电流矢量轨迹,推导过程如下,
T e = p [ Ψ f i q + ( L d − L q ) i d i q ] , T_e=p[\Psi_fi_q+(L_d-L_q)i_di_q], Te=p[Ψfiq+(Ld−Lq)idiq],标幺值形式可推导为 { T e n = i q n ( 1 − i d n ) ; i b = Ψ f L q − L d ; i q n = i q i b ; i d n = i d i b ; T e b = p Ψ f i b ; , \begin{cases}T_{en}=i_{qn}(1-i_{dn});\\i_b=\frac{\Psi_f}{L_q-L_d};\\i_{qn}=\frac{i_q}{i_b};\\i_{dn}=\frac{i_d}{i_b};\\T_{eb}=p\Psi_fi_b;\end{cases}, ⎩ ⎨ ⎧Ten=iqn(1−idn);ib=Lq−LdΨf;iqn=ibiq;idn=ibid;Teb=pΨfib;,求极值可得
{ T e n = i d n ( i d n − 1 ) 3 T e n = i q n 2 ( 1 + 1 + 4 i q n 2 ) , \begin{cases}T_{en}=\sqrt{i_{dn}(i_{dn}-1)^3}\\T_{en}=\frac{i_{qn}}{2}(1+\sqrt{1+4i_{qn}^2})\end{cases}, {Ten=idn(idn−1)3Ten=2iqn(1+1+4iqn2),可得虚线部分,二象限为驱动部分,三象限为制动部分。
为了得到最大转矩/电流比,即 T e i s , \frac{T_e}{i_s}, isTe,需要确保在恒转矩时定子电流最小,所以在虚线部分取定子电流 i s 2 = i d 2 + i q 2 i_s^2=i_d^2+i_q^2 is2=id2+iq2最小的点,可以连成实线部分——最大转矩/电流比轨迹,同理最大功率输出控制。
MTPA是效率最高的一种控制方式
2.最大功率输出控制
T e = p [ e 0 i s sin β + 1 2 ( 1 − ρ ) x d i s 2 sin 2 β ] , P e = ω r T e p = ω r [ e 0 i s sin β + 1 2 ( 1 − ρ ) x d i s 2 sin 2 β ] T_e=p[e_0i_s\sin\beta+\frac{1}{2}(1-\rho)x_di_s^2\sin2\beta],P_e=\frac{\omega_rT_e}{p}=\omega_r[e_0i_s\sin\beta+\frac{1}{2}(1-\rho)x_di_s^2\sin2\beta] Te=p[e0issinβ+21(1−ρ)xdis2sin2β],Pe=pωrTe=ωr[e0issinβ+21(1−ρ)xdis2sin2β]
在电压极限椭圆和电流极限圆的限制下,电压极限椭圆为 ( e 0 + x d i d ) 2 + ( ρ x q i q ) 2 = ( ∣ u S ∣ ω r ) 2 (e_0+x_di_d)^2+(\rho x_qi_q)^2=(\frac{|u_S|}{\omega_r})^2 (e0+xdid)2+(ρxqiq)2=(ωr∣uS∣)2得到相应工作点。
3.最大功率因数控制——MPFC
由于使用高功率因数,可以实现低成本高效率控制。功率因数角为定子电压与定子电流的夹角, cos ψ = L d − L q L d 2 sin β + L q 2 cos β , \cos\psi=\frac{L_d-L_q}{\sqrt{\frac{L_d^2}{\sin\beta}}+\frac{L_q^2}{\cos\beta}}, cosψ=sinβLd2+cosβLq2Ld−Lq,最终可以转换成定子电流矢量角 β = tan − 1 ξ , ξ = L d L q , ξ \beta=\tan^{-1}\sqrt{\xi},\xi=\frac{L_d}{L_q},\xi β=tan−1ξ,ξ=LqLd,ξ为电机凸极率。
关注理想最高功率因数 P F m a x = ξ − 1 ξ + 1 。 PF_{max}=\frac{\xi-1}{\xi+1}。 PFmax=ξ+1ξ−1。
4.最大转矩变化率控制——MRCTC
关注动态转矩,使得电机电磁转矩快速响应外界负载的变化。
∂ T e / ∂ β = 0 → β = tan − 1 ξ , ξ = L d L q 。 \partial T_e/\partial\beta=0\to\beta=\tan^{-1}\xi,\xi=\frac{L_d}{L_q}。 ∂Te/∂β=0→β=tan−1ξ,ξ=LqLd。
二、弱磁控制
弱磁控制是为了解决电流调节器饱和限制了速度范围,当电机运行到电压极限椭圆处,电流调节器已处于饱和状态,即控制系统丧失了对定子电流的控制能力。
所以应减小 i q i_q iq增大 i d i_d id使 i s i_s is向左偏向,从而使 ∣ u s ∣ |u_s| ∣us∣减小,使进入电压极限椭圆内而脱离饱和状态,从而恢复定子电流的控制功能,最终使得转子速度范围得以扩展。
补充
反向 i d i_d id有去磁作用,即增大 i d i_d id便是增强弱磁功能。
三、直接转矩控制
对在定子坐标系下的磁链转矩公式,直接对定子磁通和转矩进行控制(一般是滞环比较控制),且直接转矩控制不包含电流环,不需要进行复杂的坐标变换,对电机参数依赖较小。