ROS-Kinetic
Kinetic版本的ROS是用在Ubuntu16.04版本下的,先确认Ubuntu版本
Kinetic安装的官方文档(可以按照原文来)
http://wiki.ros.org/kinetic/Installation/Ubuntu
1.配置Ubuntu的软件仓库
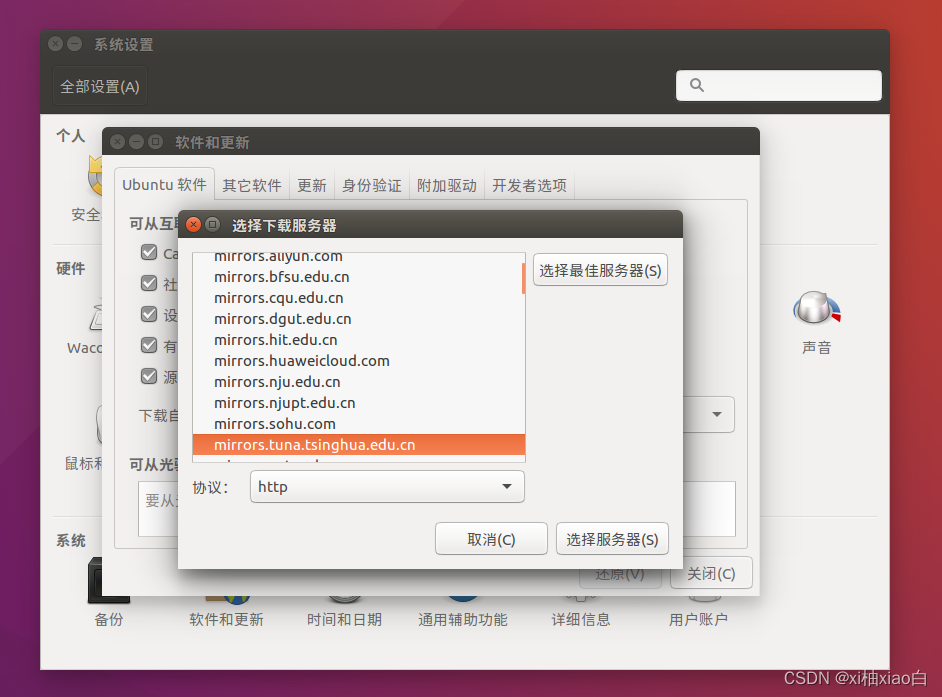
在安装 Ubuntu 的过程中如果你系统选了中文那么你的软件更新源应该自动选择了来自中国的服务器,也可以在主界面点开左下角后找到 “软件与更新” 选择清华的源,这样更新软件会更快。
2.将ROS的安装源添加到List列表
这里有四个国内的源,选择离位置较近的,据说上海交大的下载最快。将指令复制到终端中执行,随便执行一个
中科大(安徽合肥)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
清华大学(北京)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
北京外国语学院(北京)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.bfsu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
上海交通大学(上海)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置安装秘钥
从服务器获取安装密钥,执行两条指令
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
可能会因为网络原因而一直卡死,按Ctrl+C取消进程,然后执行下面的命令
wget http://packages.ros.org/ros.key
sudo apt-key add ros.key
4.下载安装ROS
首先更新一下索引列表
sudo apt update
从更新后的索引列表安装 ROS 系统,这里由于下载网速与各个源不同安装速度各有不同,下载完成可能需要个十几分钟。可以查看ROS官网选择自己要下的版本,我直接下了最全的,可以自带Gazebo这种软件
sudo apt-get install ros-kinetic-desktop-full
5.环境参数配置
首先将 ROS 的环境设置脚本添加到终端程序的初始化脚本里,之后每次打开终端都会进行 ROS 环境的初始化。执行下面两条指令。
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
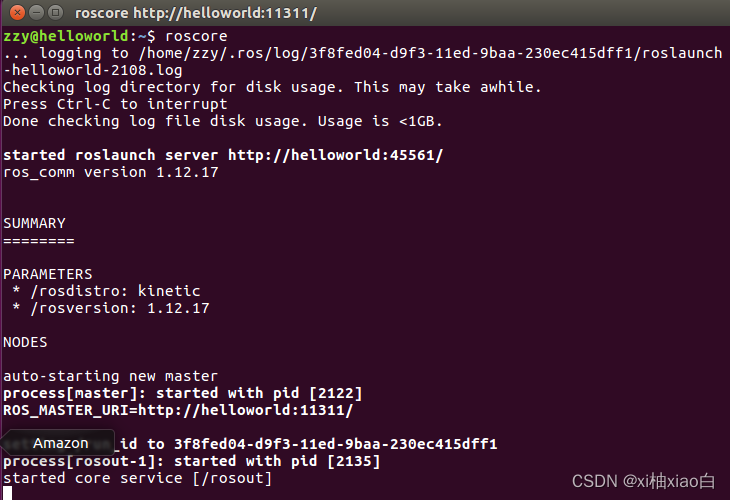
然后在终端输入 roscore 就可以看到 ROS 系统运行起来了
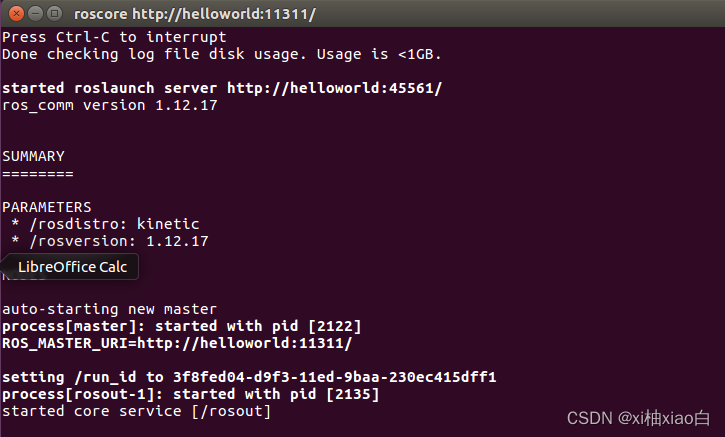
运行效果
6.rosdep初始化
对 ROS 的依赖包工具进行初始化,这样方便我们以后安装第三方的拓展软件包
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
先将 rosdep 的资源文件配置从国外地址修改到国内地址,依次执行下面三条指令
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
安装的时候,可能因为网络的原因会崩,那就重新执行,直到成功为止
安装 rosdep
sudo rosdep init
更新 rosdep
rosdep update
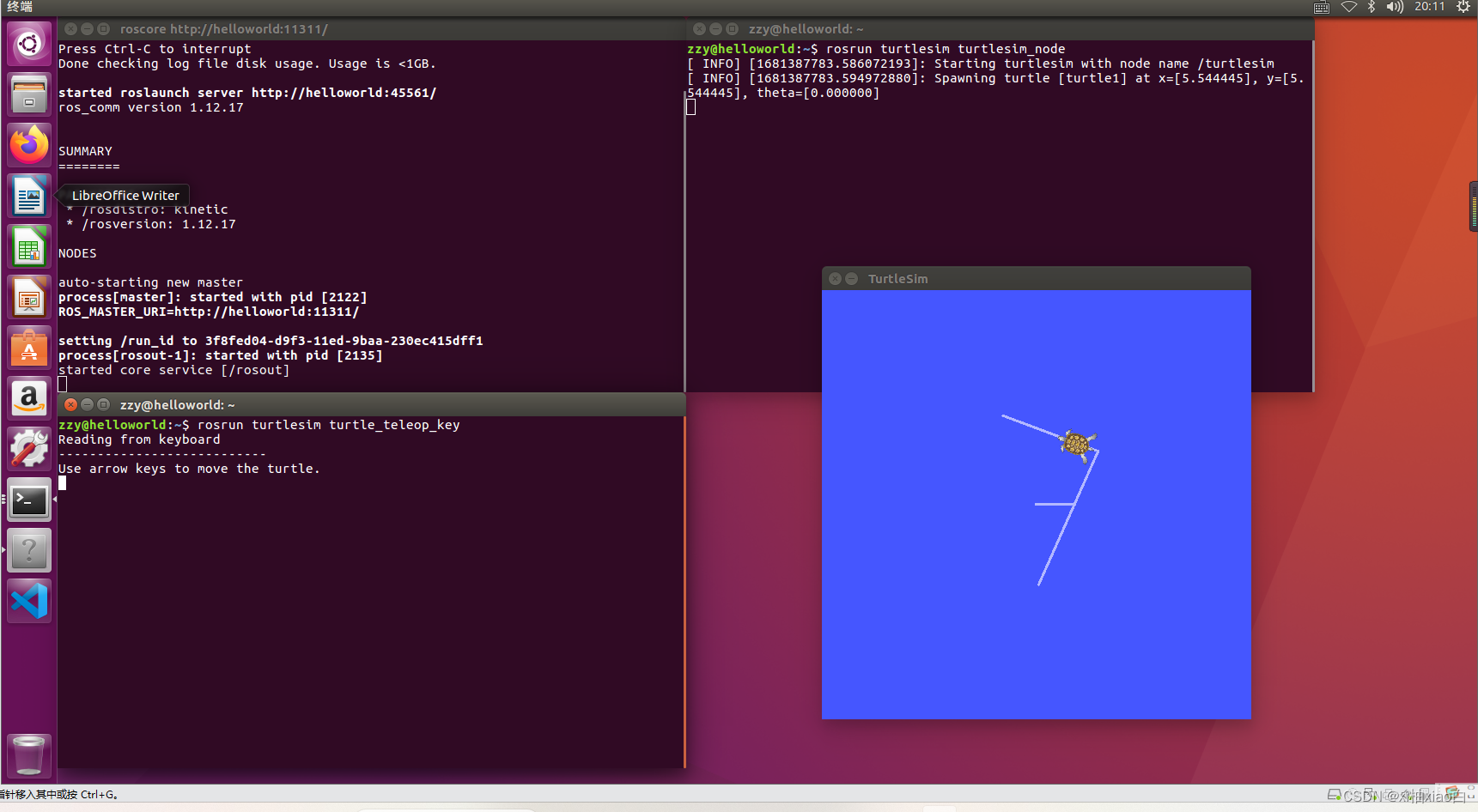
ROS-Kinetic小乌龟测试
1.启动ROS
打开一个终端
执行
roscore
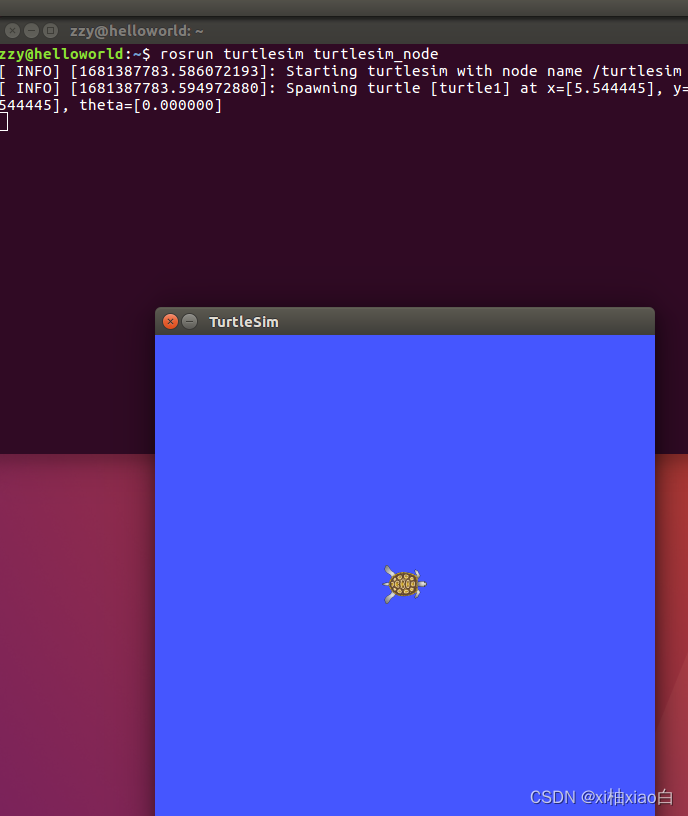
2.启动小海龟仿真
重新打开一个终端
执行
rosrun turtlesim turtlesim_node
3.使海龟动起来
在新打开一个终端
执行
rosrun turtlesim turtle_teleop_key
最终效果 点击运行turtle_teleop_key的终端,然后使用方向键,就可以控制海龟的运动。
ROS安装完成