整体过程
- 准备资料
- 1,步进电机内部结构示意图
- 2,步进电机命名
- 3,实际结构的转速比
- 4,数值的含义
- 5,实际内部主动轮结构分析
- 实际内部机构及接线
- 定子部分
- 转子部分
- 定子和转子磁极的工作分析
- 6,工作时序
- 7,驱动芯片ULN2003简介
- 电机工作过程分析
- 8,软件实现
- 软件参数设置分析
- 个人对爪极作用磁铁转子的分析
- 结构示意图
准备资料
参考:https://www.bilibili.com/video/BV1h341147ny/?spm_id_from=333.337.search-card.all.click&vd_source=00bd76f9d6dc090461cddd9f0deb2d51
1,步进电机内部结构示意图
参考:https://www.bilibili.com/video/BV1bX4y1A717/?spm_id_from=333.880.my_history.page.click&vd_source=00bd76f9d6dc090461cddd9f0deb2d51
可知道转子是一个小磁体,电流改变的是定子上不同相导通得到不同的磁场方向,注意这是一个步进电机示意图,并还不是28BYJ48步进电机的真实内部结构
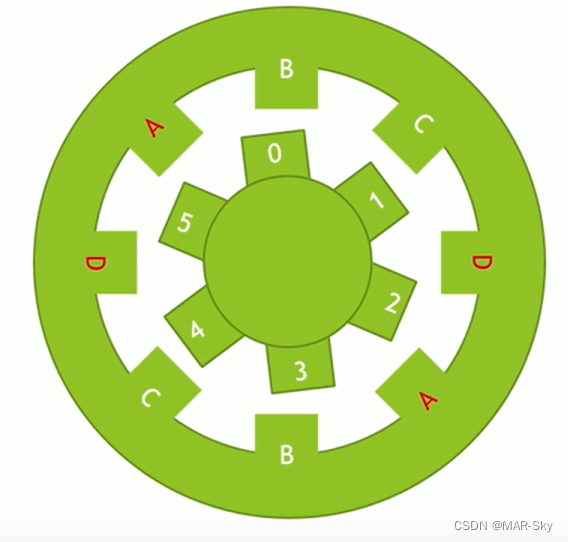
实际上就是通过ABCD四个定子上电流有规律的 导通才让电机转动。
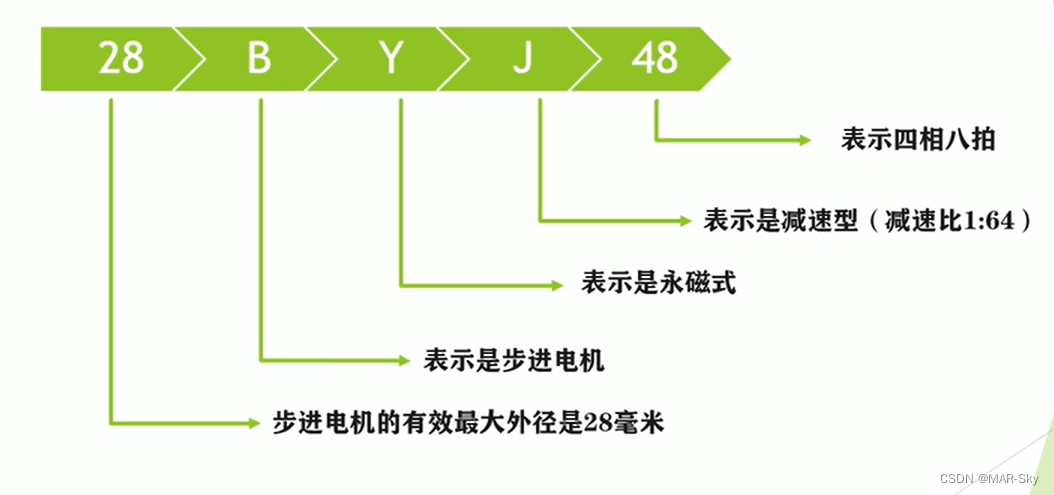
2,步进电机命名
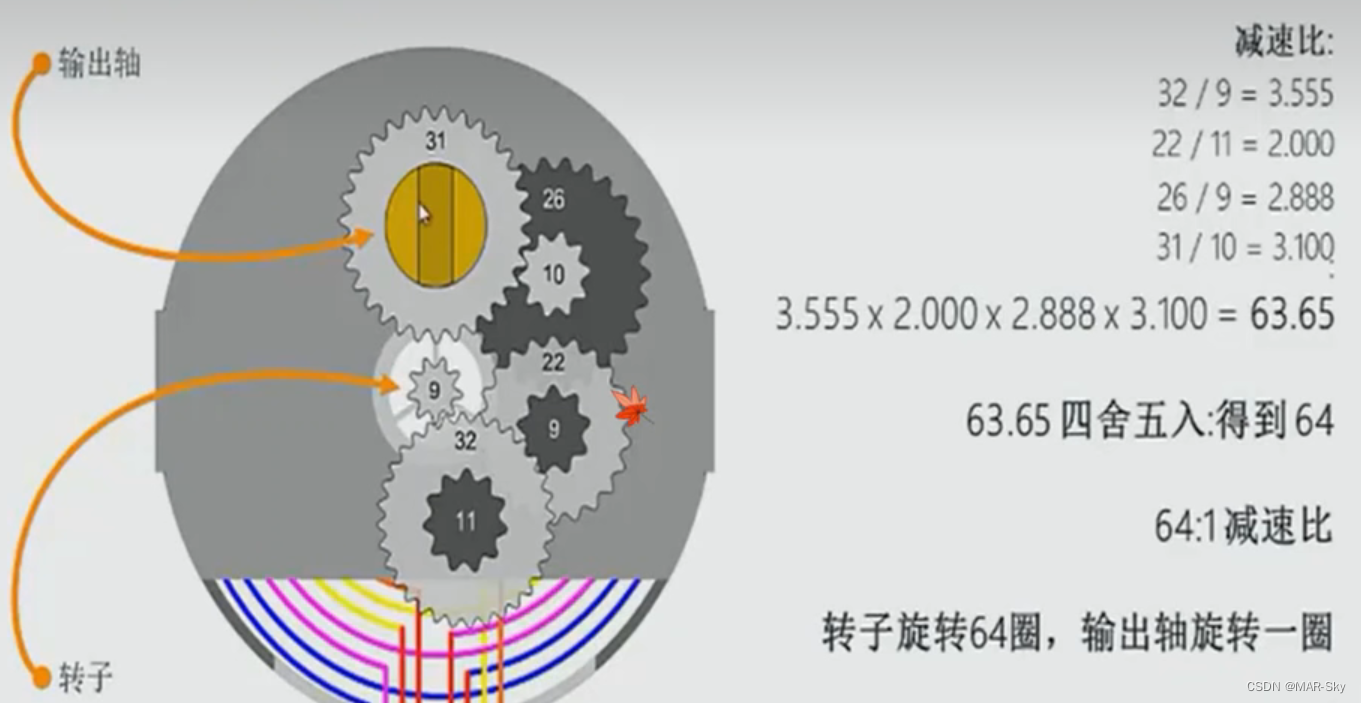
3,实际结构的转速比
参考:https://www.bilibili.com/video/BV1JX4y1c7uC/?spm_id_from=333.337.search-card.all.click&vd_source=00bd76f9d6dc090461cddd9f0deb2d51(这个视频分析很好,但也有些本质没解释清楚的东西)
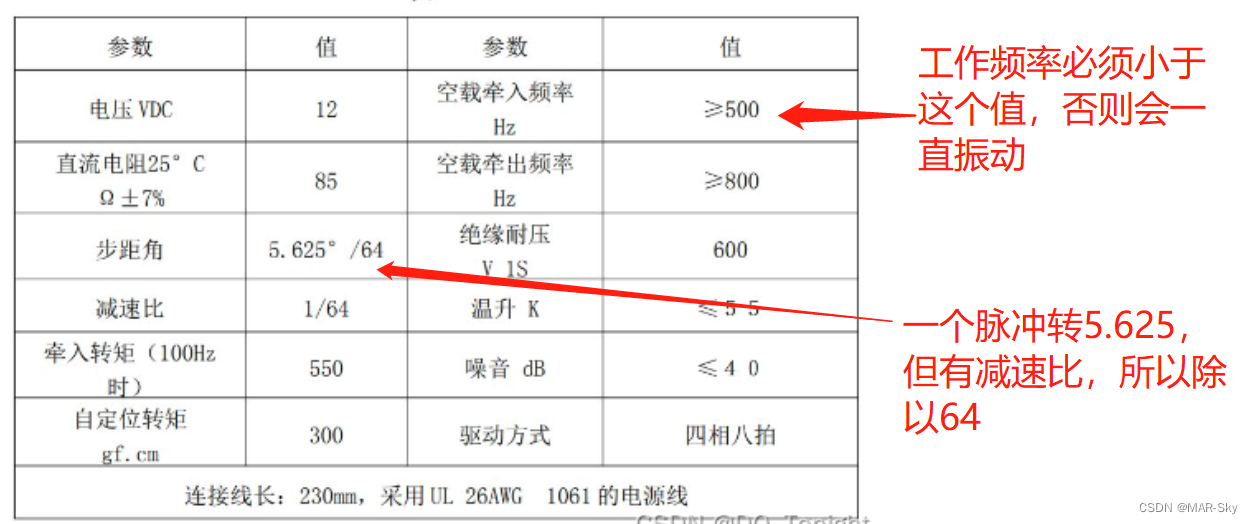
4,数值的含义
参考:https://blog.csdn.net/weixin_51341083/article/details/125274007
在实际测试中,频率越大,启动时转动丢失的脉冲越多(就是发送了这么多脉冲却没有达到对应的转动角度)。但当频率超过了空载输出频率可能连启动都无法达到,电机会在振动。
5,实际内部主动轮结构分析
简单的计算
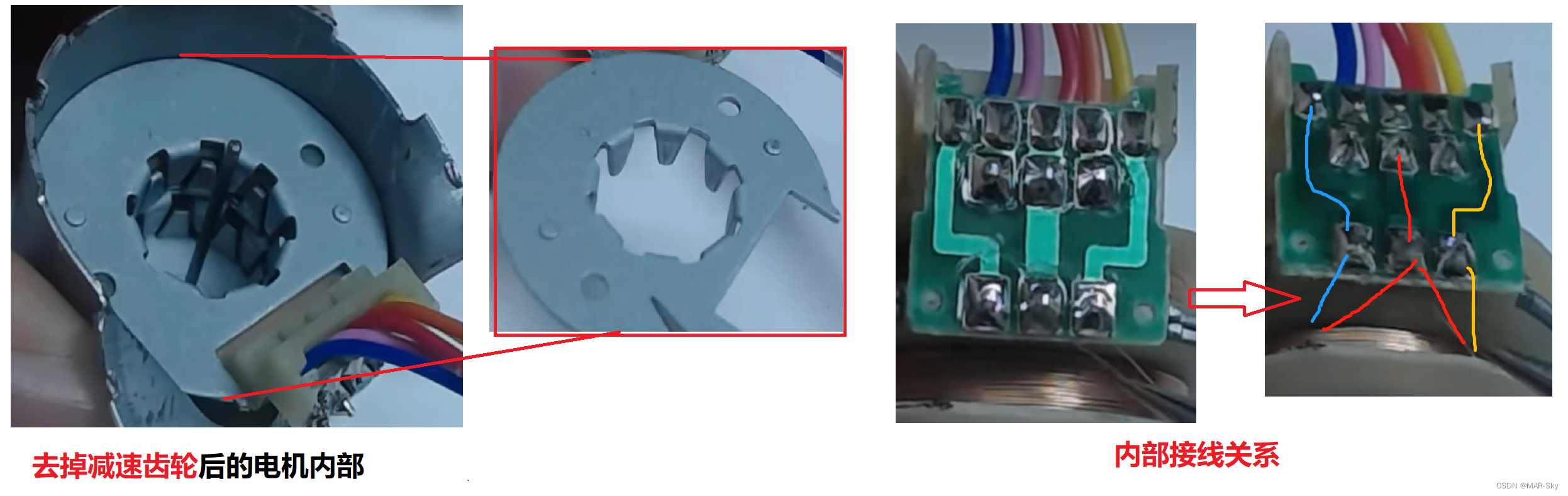
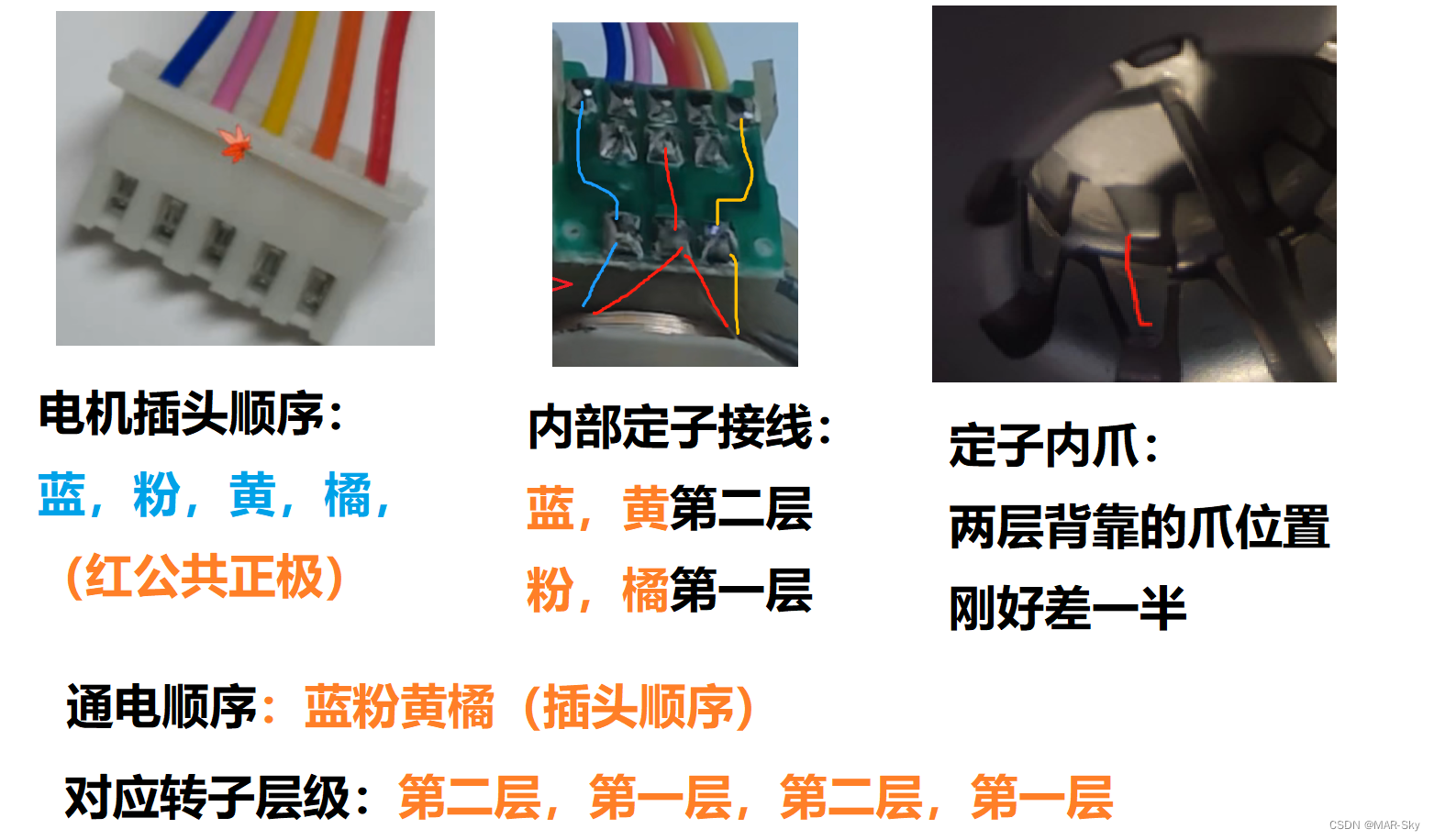
实际内部机构及接线
定子部分
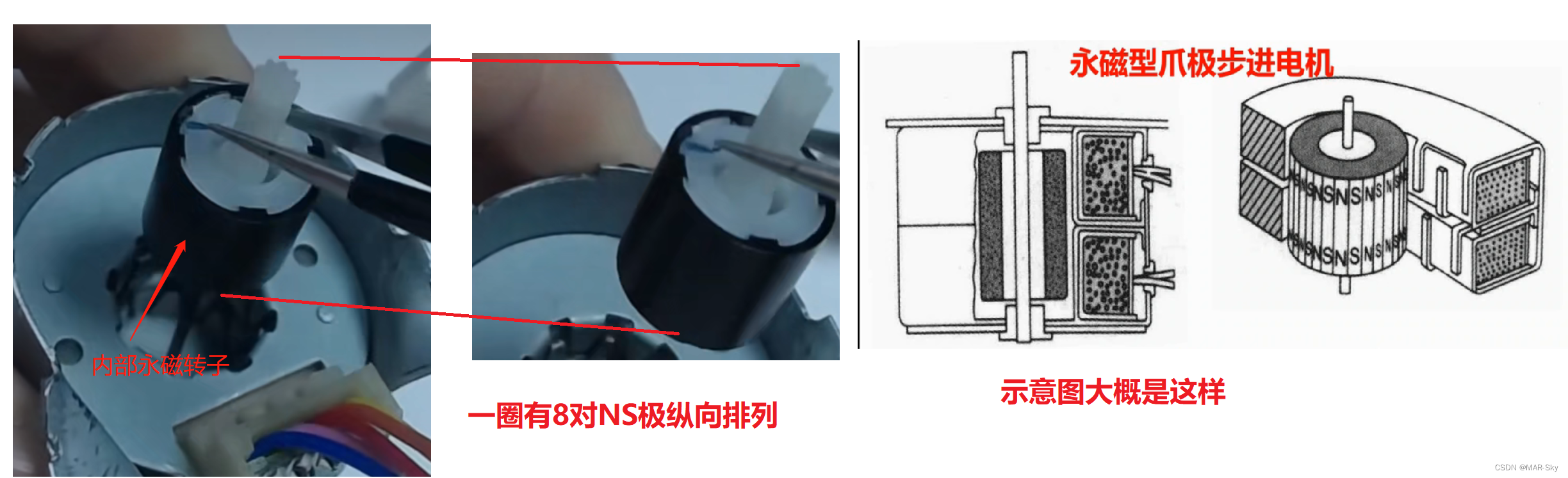
转子部分
定子和转子磁极的工作分析
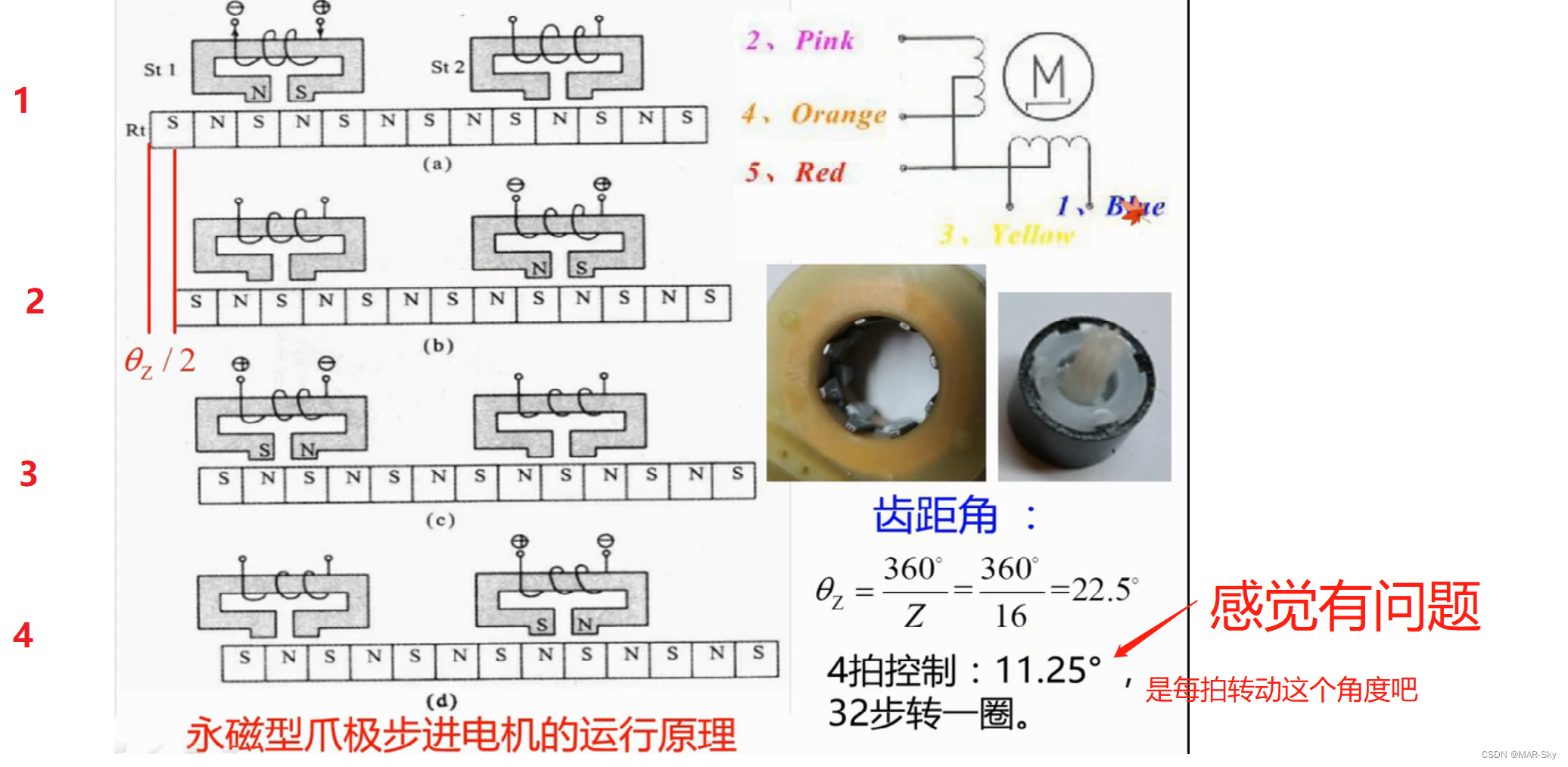
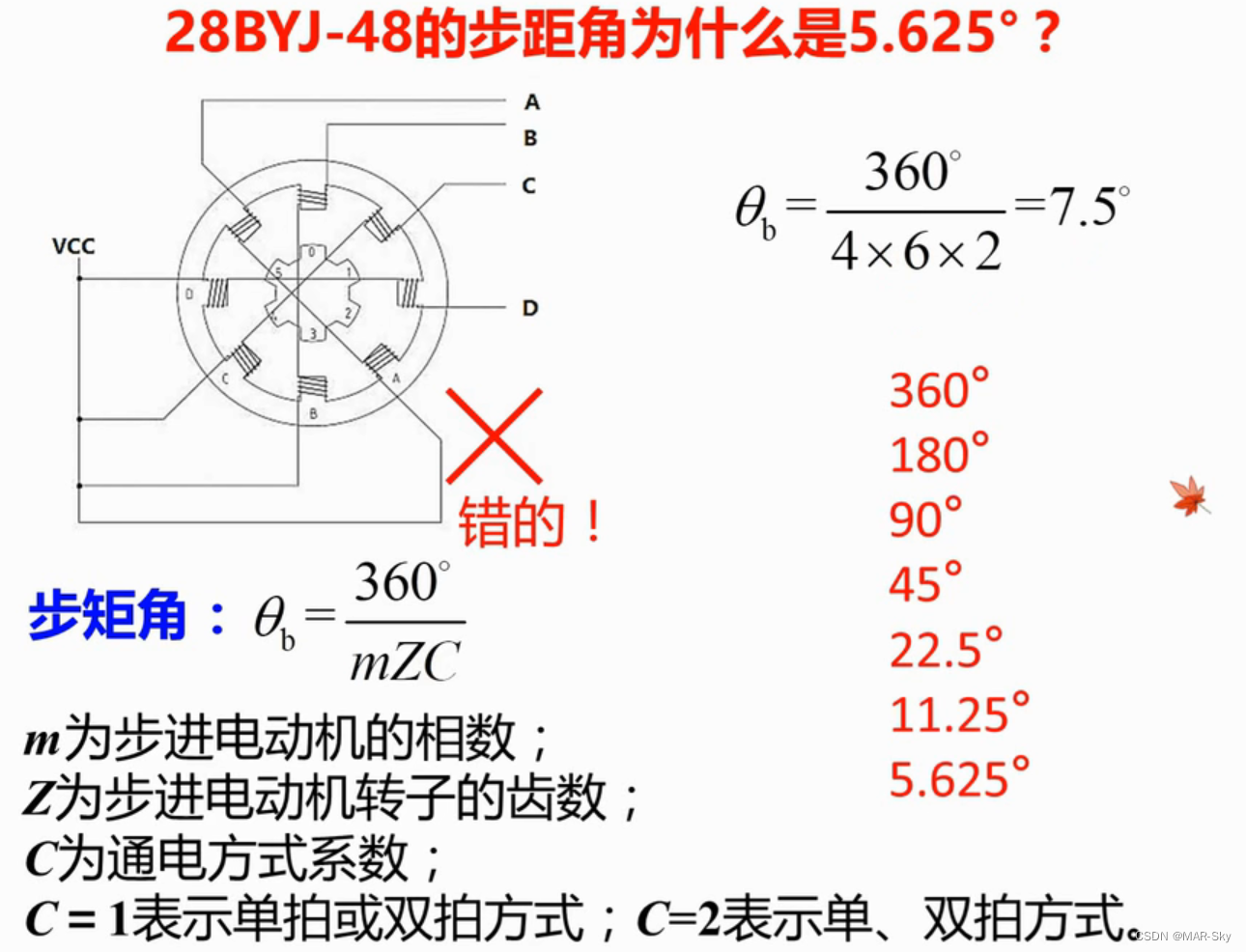
下面的一个步指的是一个周期的拍数。
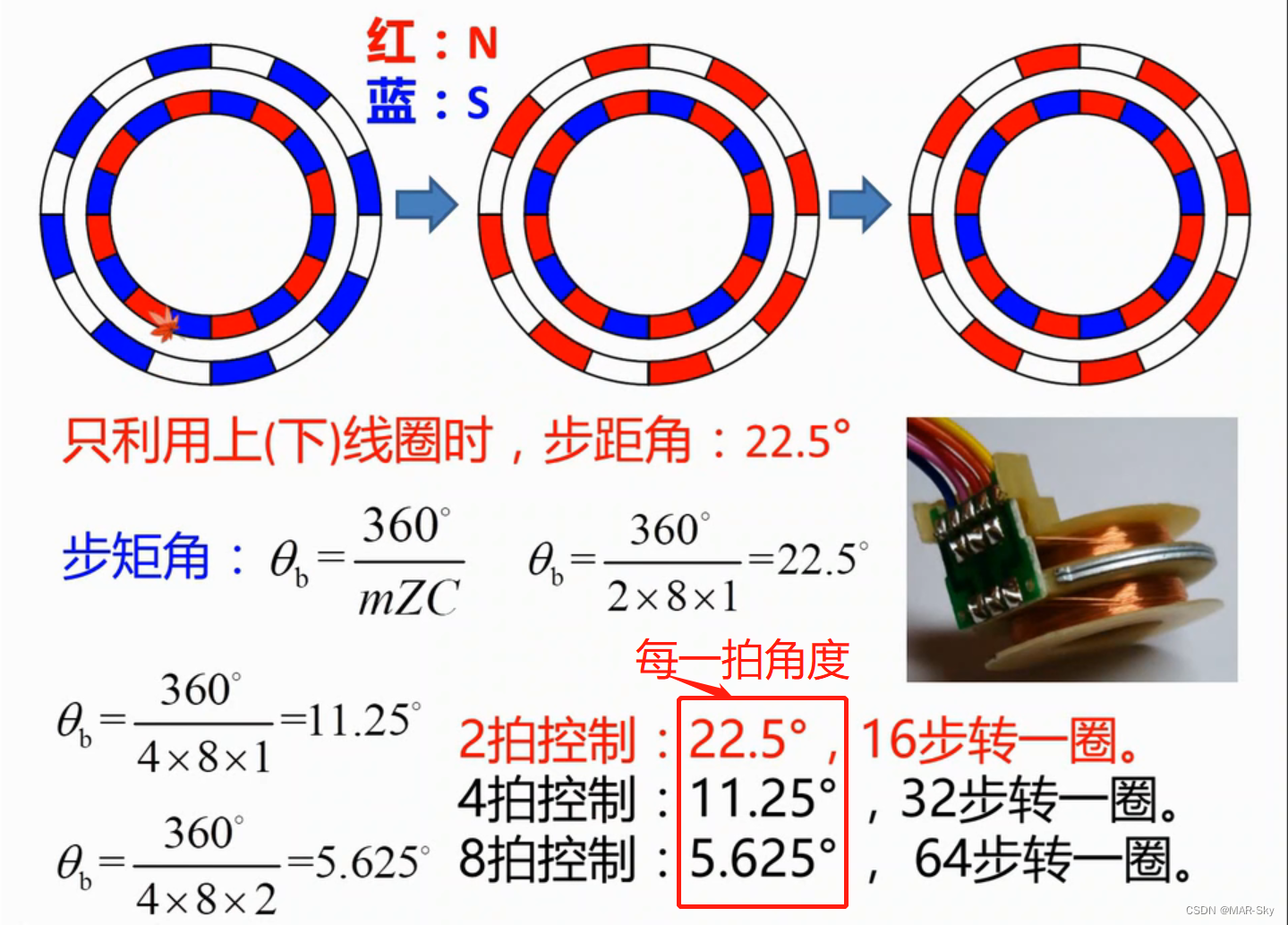
这激素hi为什么步距角是5.625.这时使用8拍控制时才实现的最小步距角。
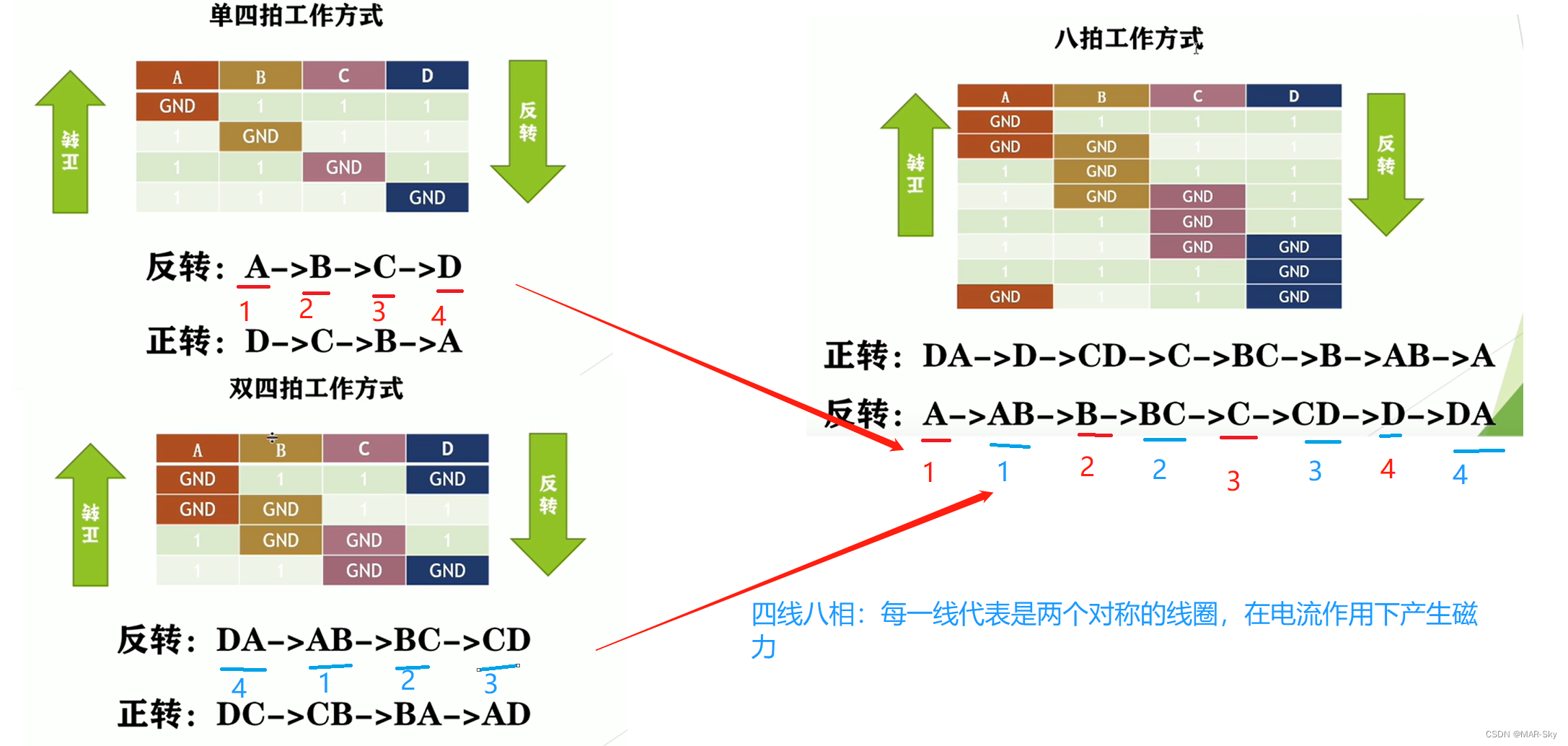
6,工作时序
参考:https://www.bilibili.com/read/cv22159268/
从前面的内部 结构可以看出,每根线都是有两个相对的定子线圈组成。而通过两组线圈和一组线圈产生的力来看。两组线圈产生的力会是一组线圈的 2 \sqrt{2} 2倍。这样看来,四拍的转子在工作过程中的受力大小更加稳定,而八拍的转子受力是有规律变化的。
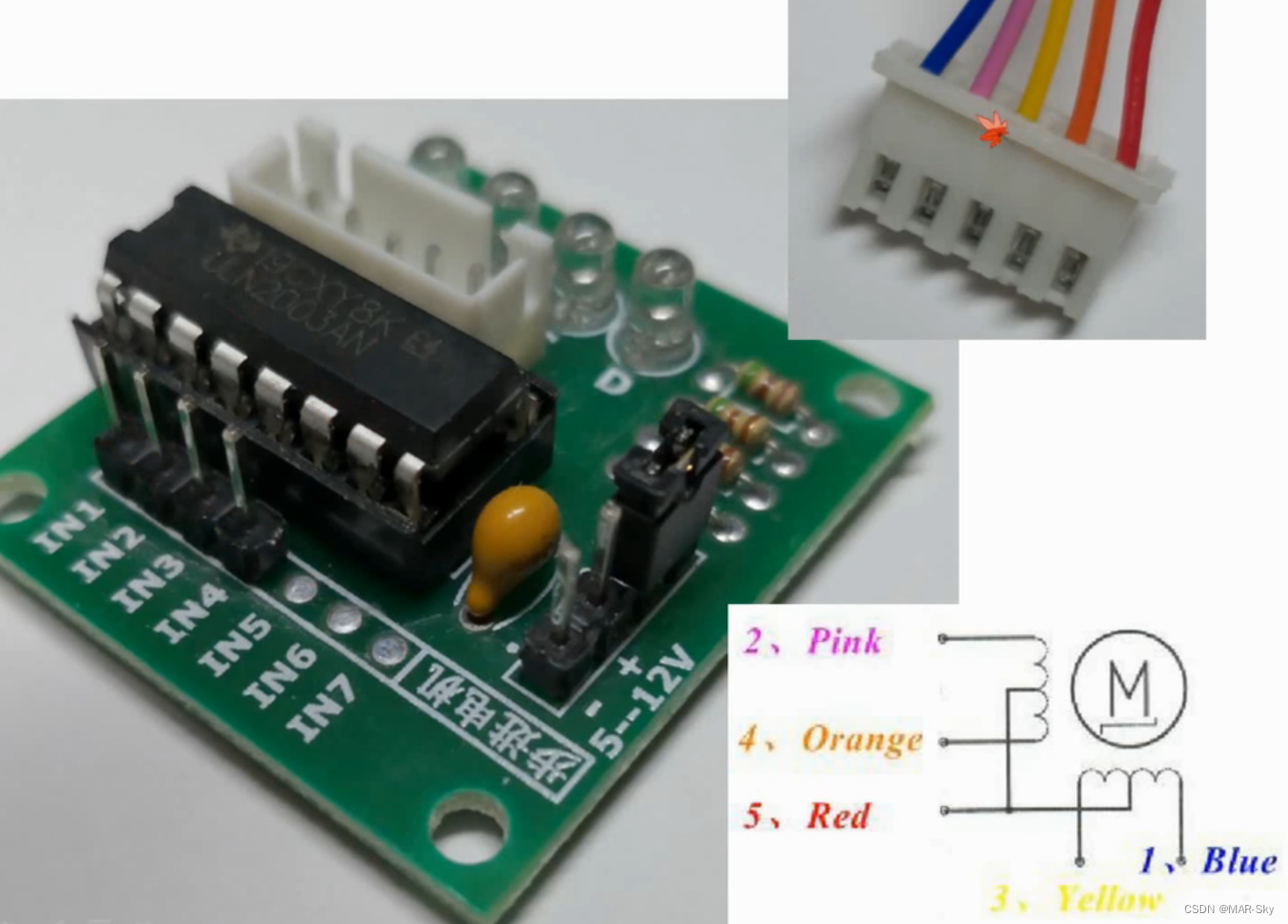
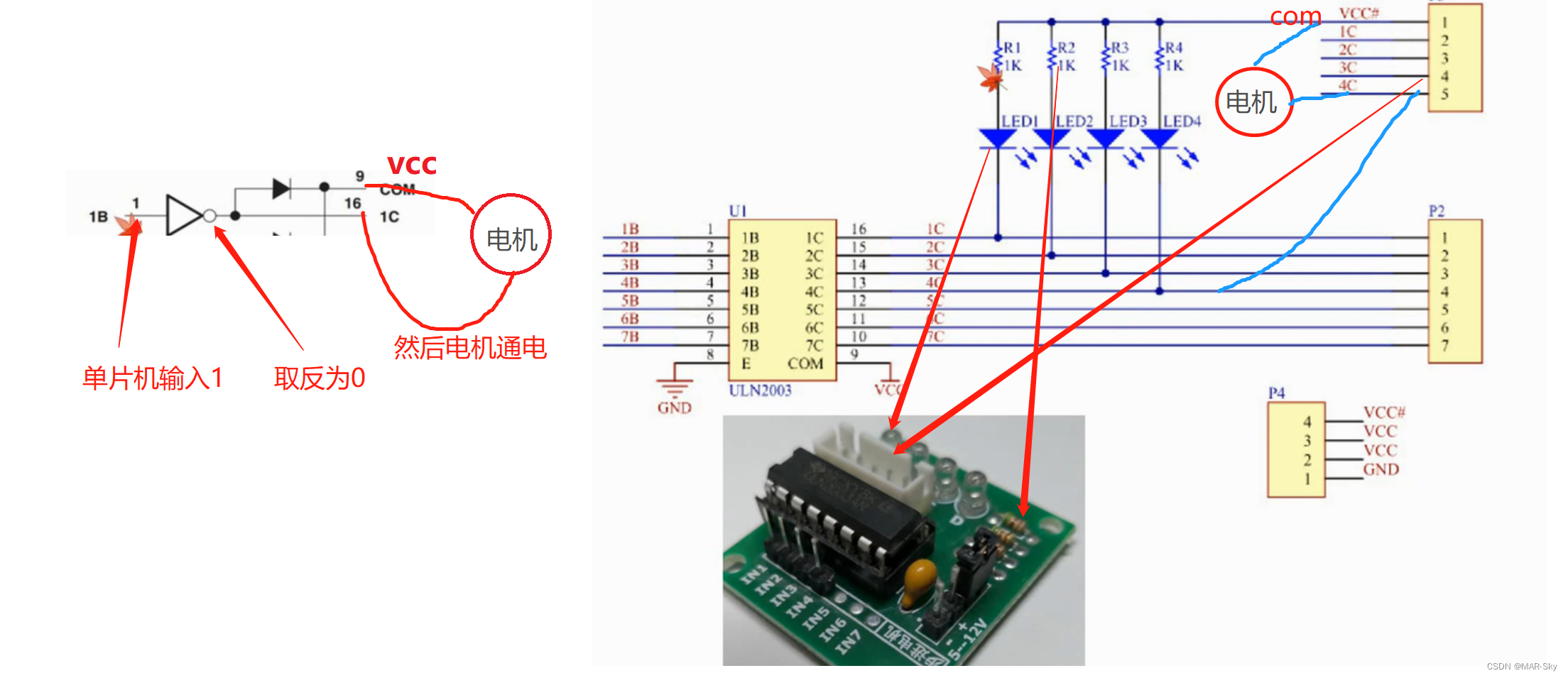
7,驱动芯片ULN2003简介
模块图示如下
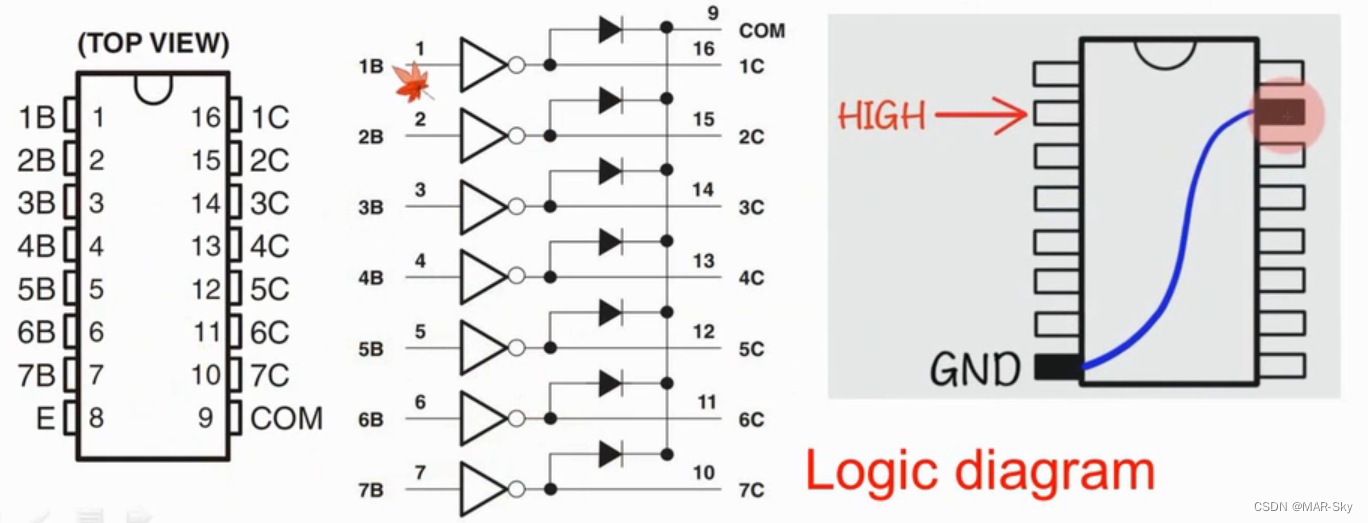
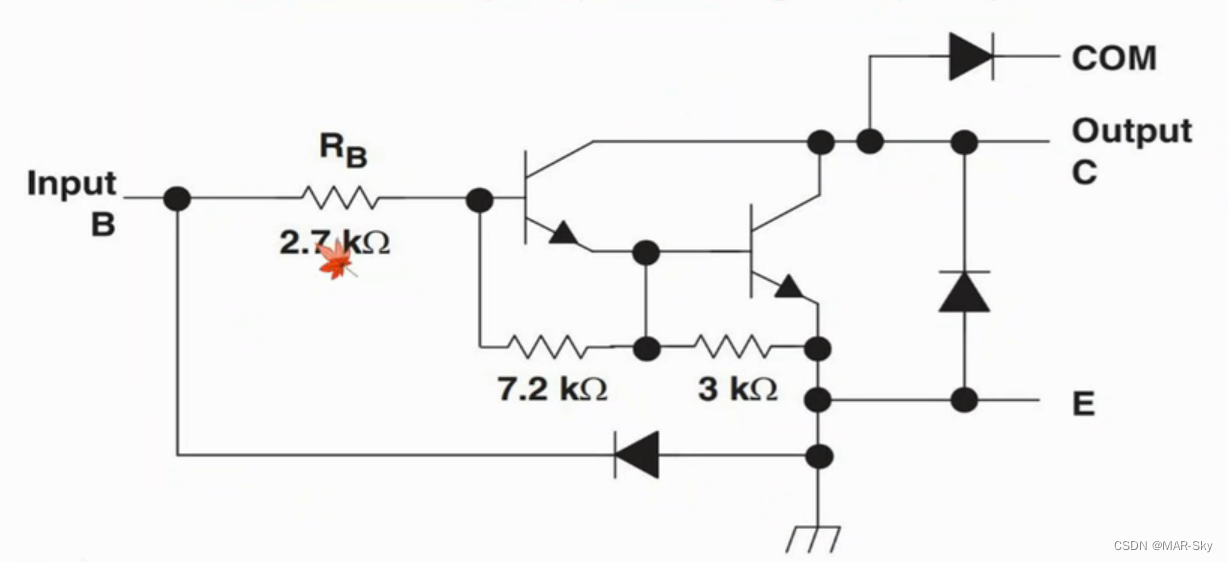
每一个输入接口的电路原理图,由一个达林顿管,两次放大电流得到大的驱动电流。
电机工作过程分析
8,软件实现
程序
/*变量定义*/int fir = 16;int sec = 5;
int thi = 4;int fort=0;int count=0;int delay_ms=1000;/*初始化函数*/
void setup() {// put your setup code here, to run once:pinMode(fir, OUTPUT);
pinMode(sec, OUTPUT);
pinMode(thi, OUTPUT);
pinMode(fort, OUTPUT);digitalWrite(fir, LOW); //初始化全为停止digitalWrite(thi, LOW); digitalWrite(fort, LOW); digitalWrite(sec, LOW);
}
/*循环执行函数*/
void loop() {// put your main code here, to run repeatedly:if(count<8){ //使用单相的四相驱动实例,8个四相刚好是主动轴的一圈digitalWrite(fort, LOW); digitalWrite(fir, HIGH); //第一个线圈导通delay(delay_ms);// digitalWrite(sec, HIGH); //第一,二导通,若想使用八拍可以在每步后添加一个类似这种的命令// delay(delay_ms);digitalWrite(fir, LOW); digitalWrite(sec, HIGH); //第二导通delay(delay_ms) ;digitalWrite(sec, LOW); digitalWrite(thi, HIGH); //第三个导通delay(delay_ms);digitalWrite(thi, LOW);digitalWrite(fort, HIGH); //第四导通delay(delay_ms);count+=1;
}
else{digitalWrite(fir, LOW); //记得关闭线圈,否则有剩余的相一直通电digitalWrite(sec, LOW);digitalWrite(thi, LOW);digitalWrite(fort, LOW);}
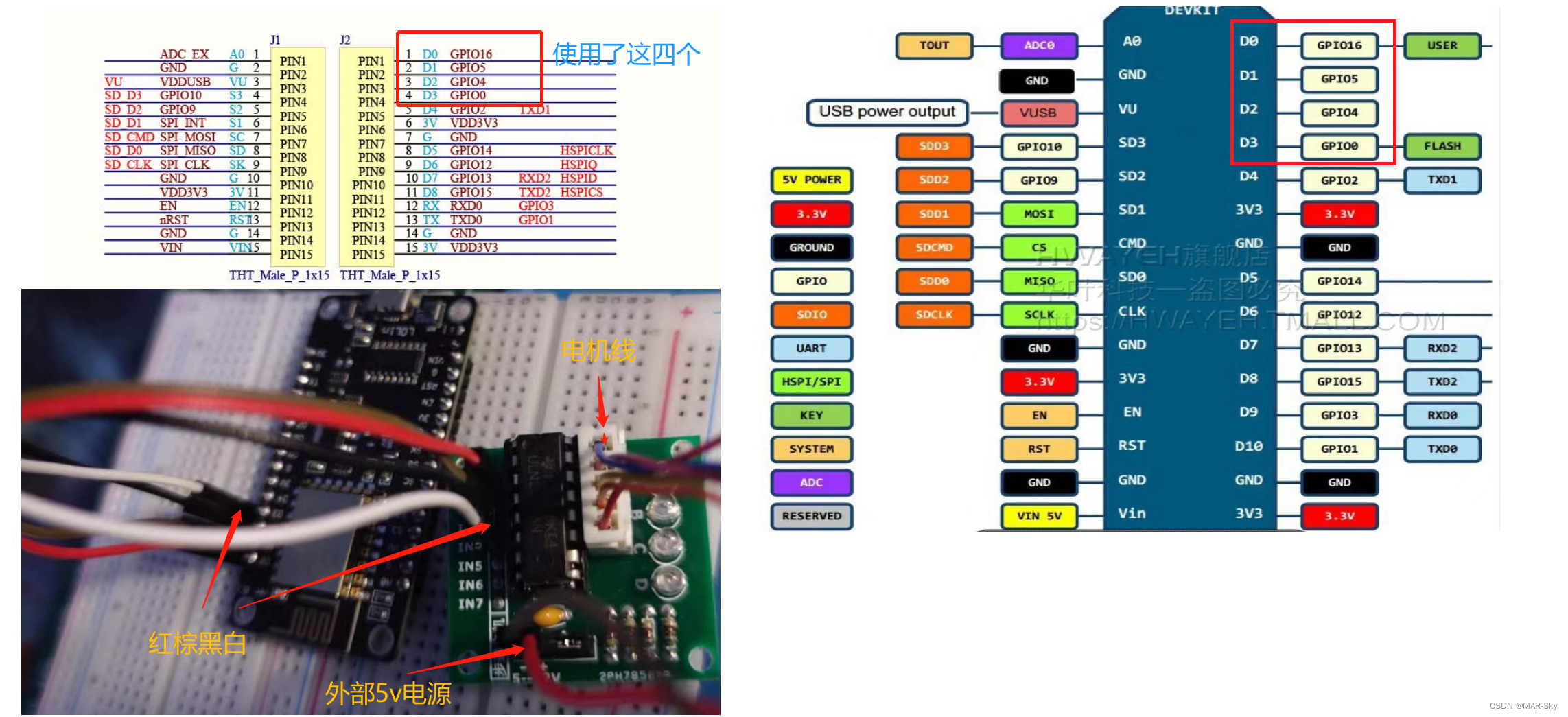
}硬件连接引脚
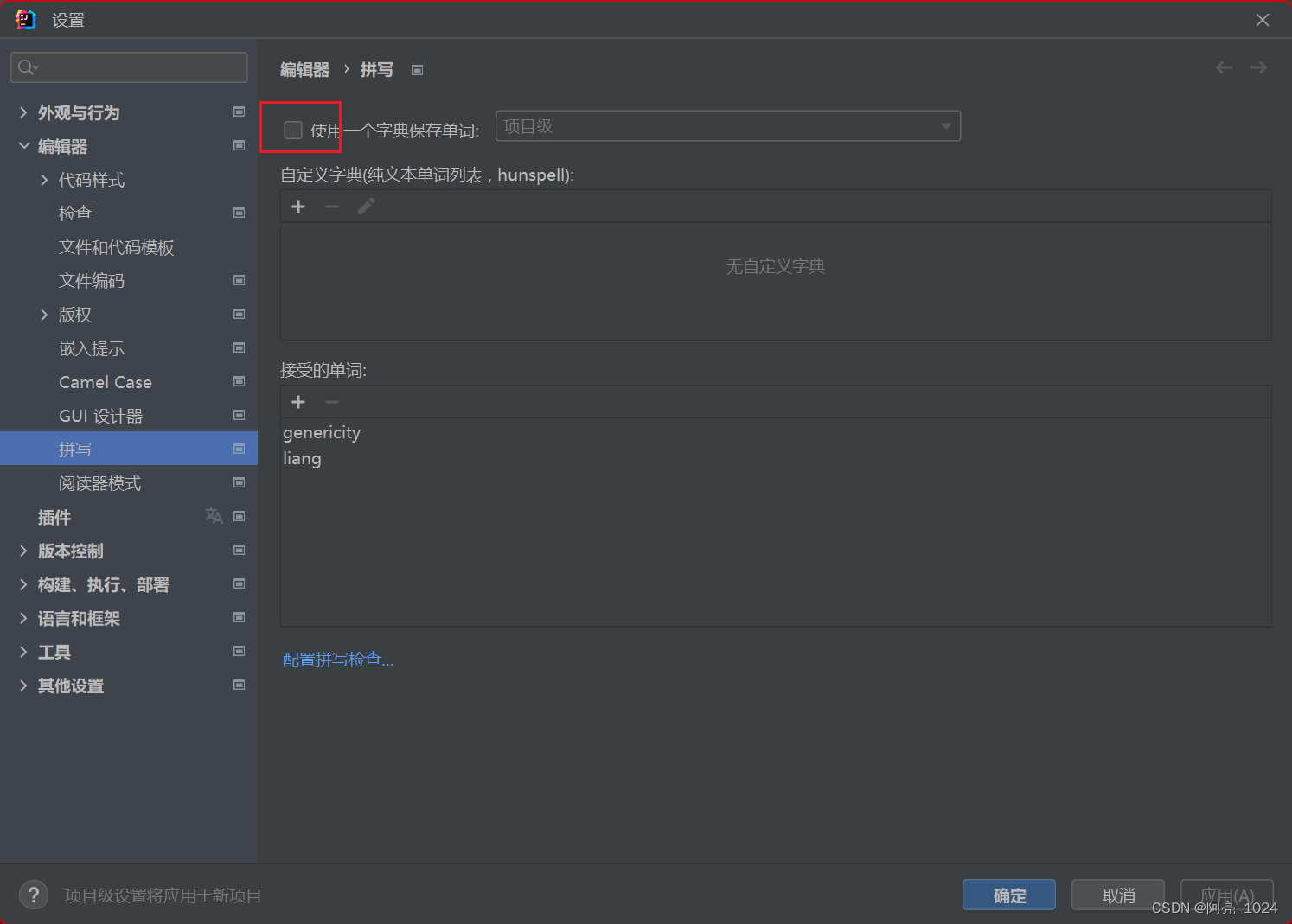
软件参数设置分析
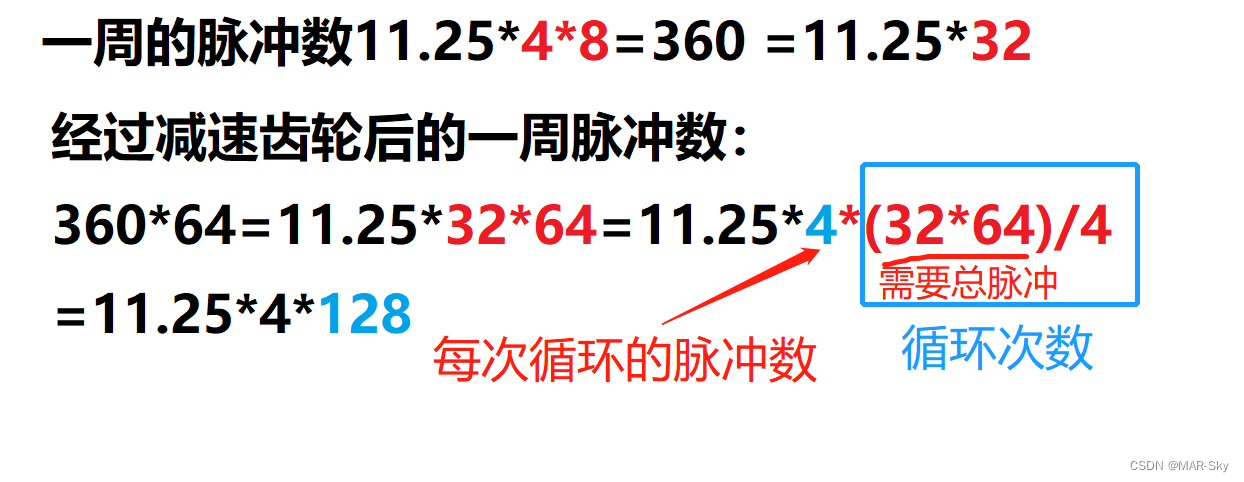
根据前面的描述,单极驱动时的每个脉冲的驱动角度是11.25°,所以循环中有四个脉冲,需要循环8次就是360,也就是主动齿轮转动一周
11.25 (脉冲步进角度) ∗ 4 (一次循环的脉冲数) ∗ 8 (循环次数) = 45 ∗ 8360 11.25(脉冲步进角度)*4(一次循环的脉冲数)*8(循环次数)=45*8360 11.25(脉冲步进角度)∗4(一次循环的脉冲数)∗8(循环次数)=45∗8360
如果考虑减速比的情况
11.25 ∗ 4 ∗ x = 45 ∗ x = 360 ∗ 64 → x = 128 11.25*4*x=45*x=360*64 \rightarrow x=128 11.25∗4∗x=45∗x=360∗64→x=128
个人测试中无意间犯了一个很搞笑的错误,这个循环次数的计算错误,因为 11.25 ∗ 4 ∗ 8 = 360 理所当然的让循环次数 8 ∗ 64 = 516 得到了实际输出的角度 11.25*4*8=360理所当然的让循环次数8*64=516得到了实际输出的角度 11.25∗4∗8=360理所当然的让循环次数8∗64=516得到了实际输出的角度但是这里的减速比不再是对一个脉冲的,而是对应4个脉冲的
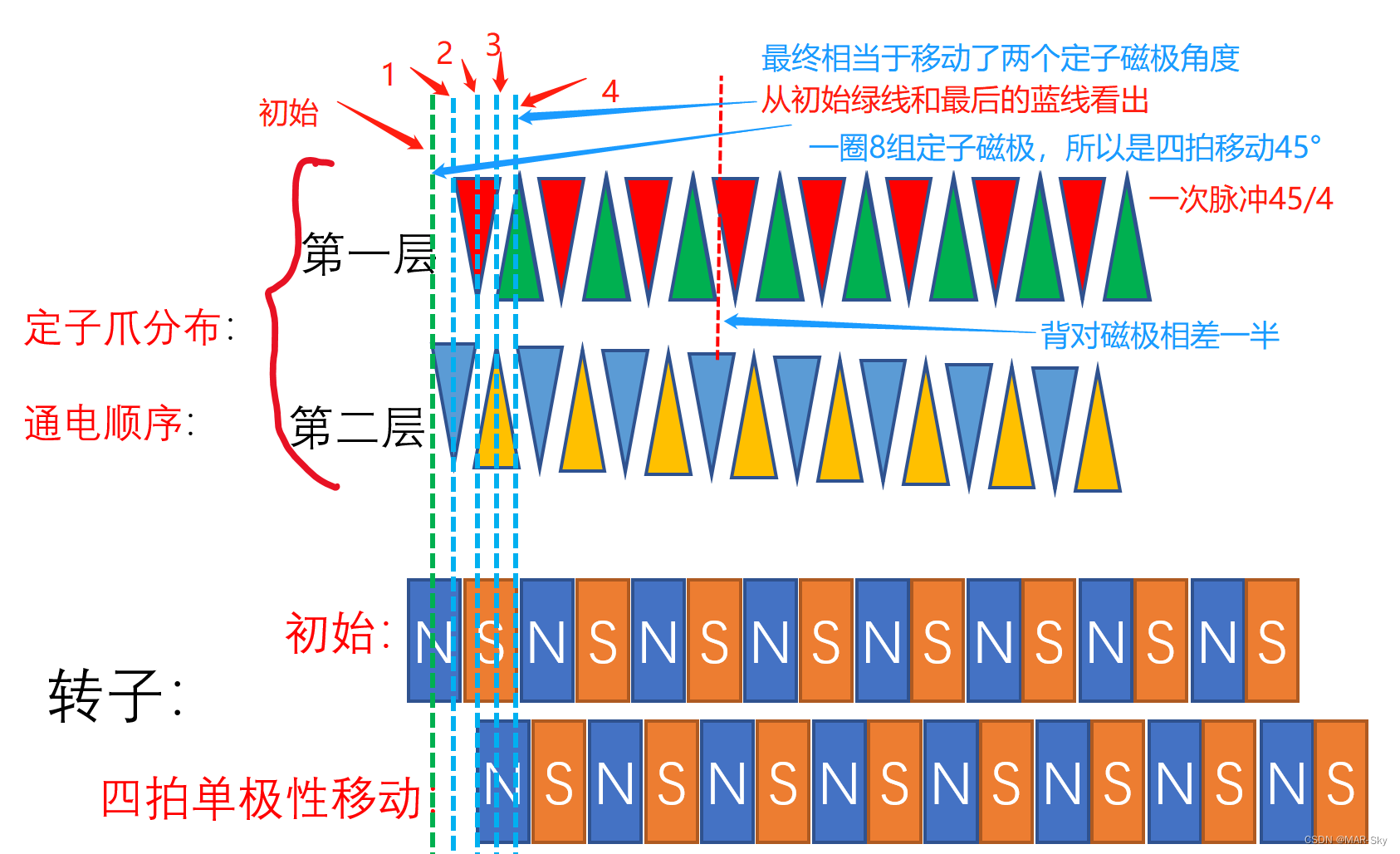
个人对爪极作用磁铁转子的分析
结构示意图