目录
- 一、环境准备
- 1.进入ModelArts官网
- 2.使用CodeLab体验Notebook实例
SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法。使用Nvidia Titan X在VOC 2007测试集上,SSD对于输入尺寸300x300的网络,达到74.3%mAP以及59FPS;对于512x512的网络,达到了76.9%mAP ,超越当时最强的Faster RCNN(73.2%mAP)。具体可参考论文。 SSD目标检测主流算法分成可以两个类型:
- two-stage方法:RCNN系列
通过算法产生候选框,然后再对这些候选框进行分类和回归。
- one-stage方法:yolo和SSD
直接通过主干网络给出类别位置信息,不需要区域生成。
如果你对MindSpore感兴趣,可以关注昇思MindSpore社区


一、环境准备
1.进入ModelArts官网
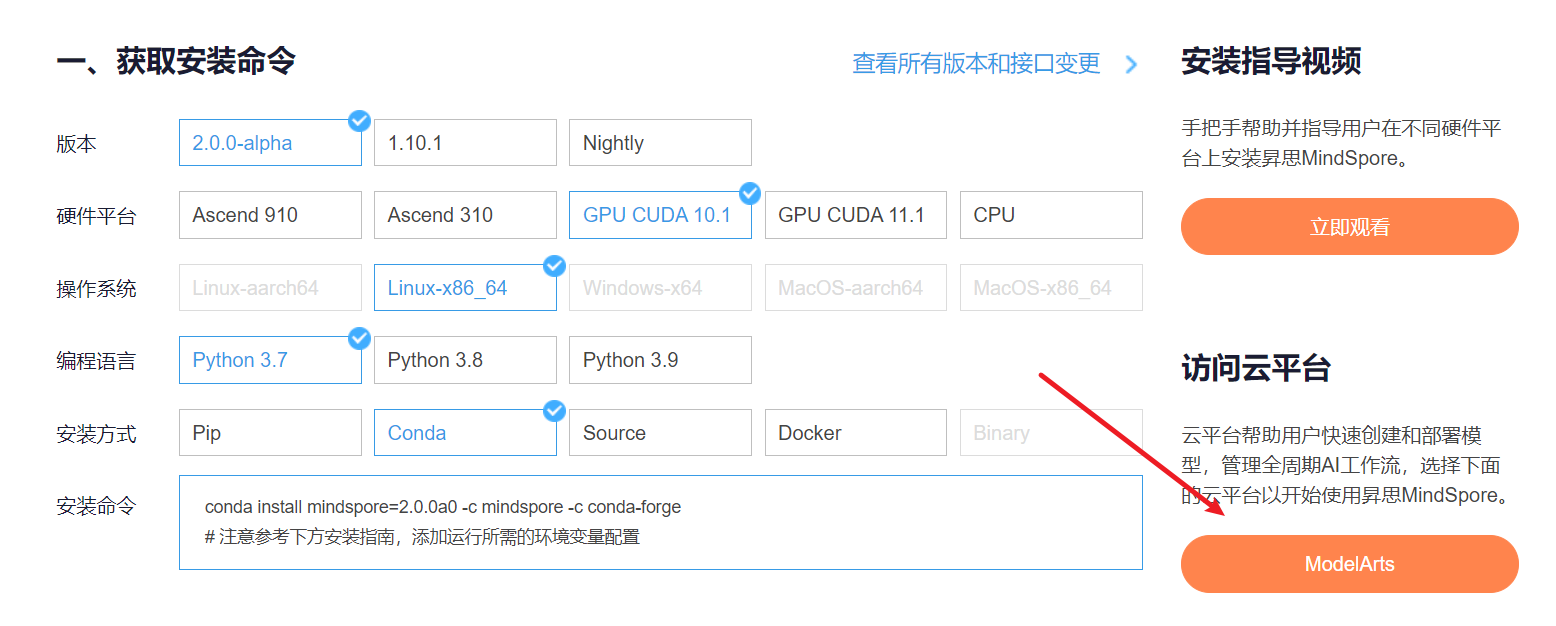
云平台帮助用户快速创建和部署模型,管理全周期AI工作流,选择下面的云平台以开始使用昇思MindSpore,获取安装命令,安装MindSpore2.0.0-alpha版本,可以在昇思教程中进入ModelArts官网
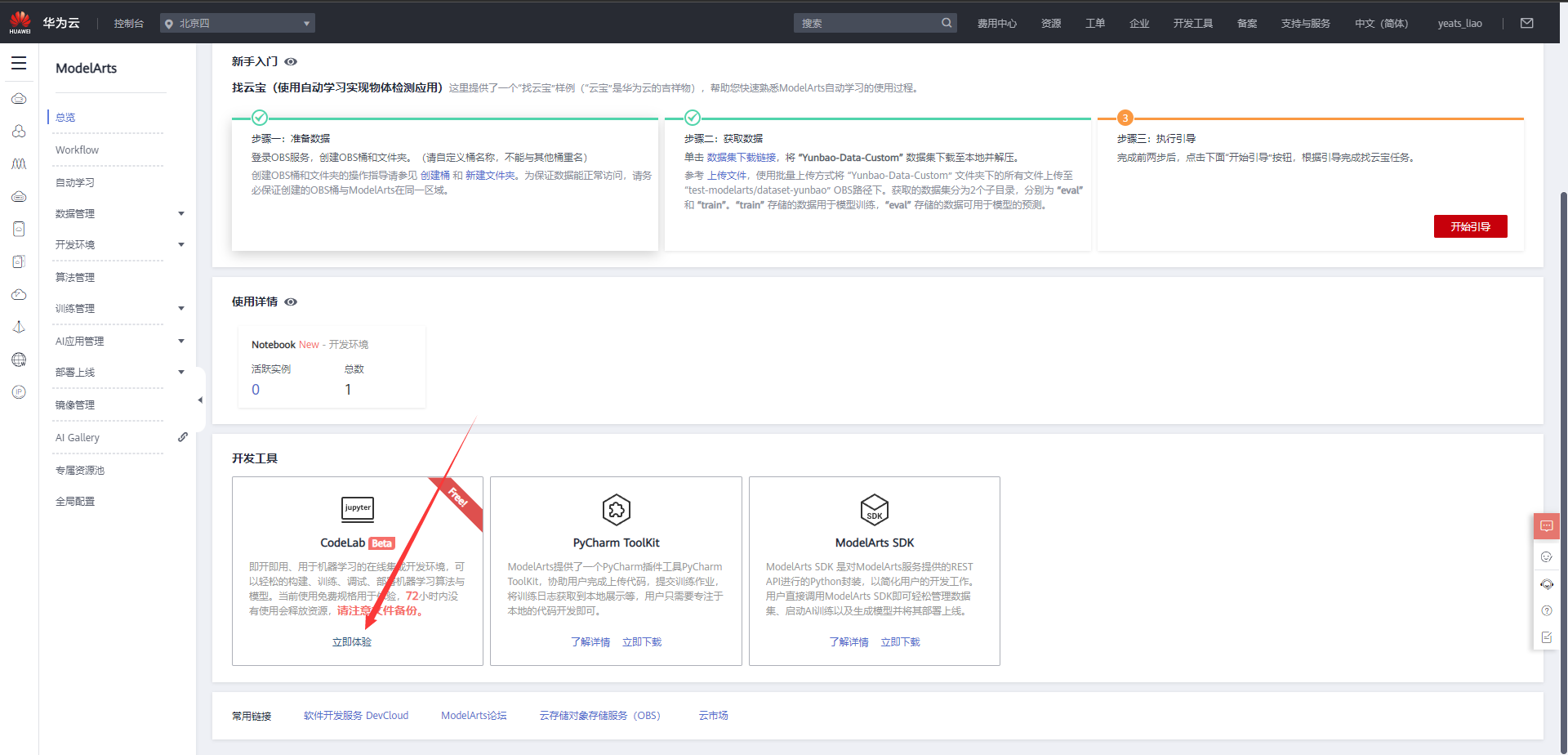
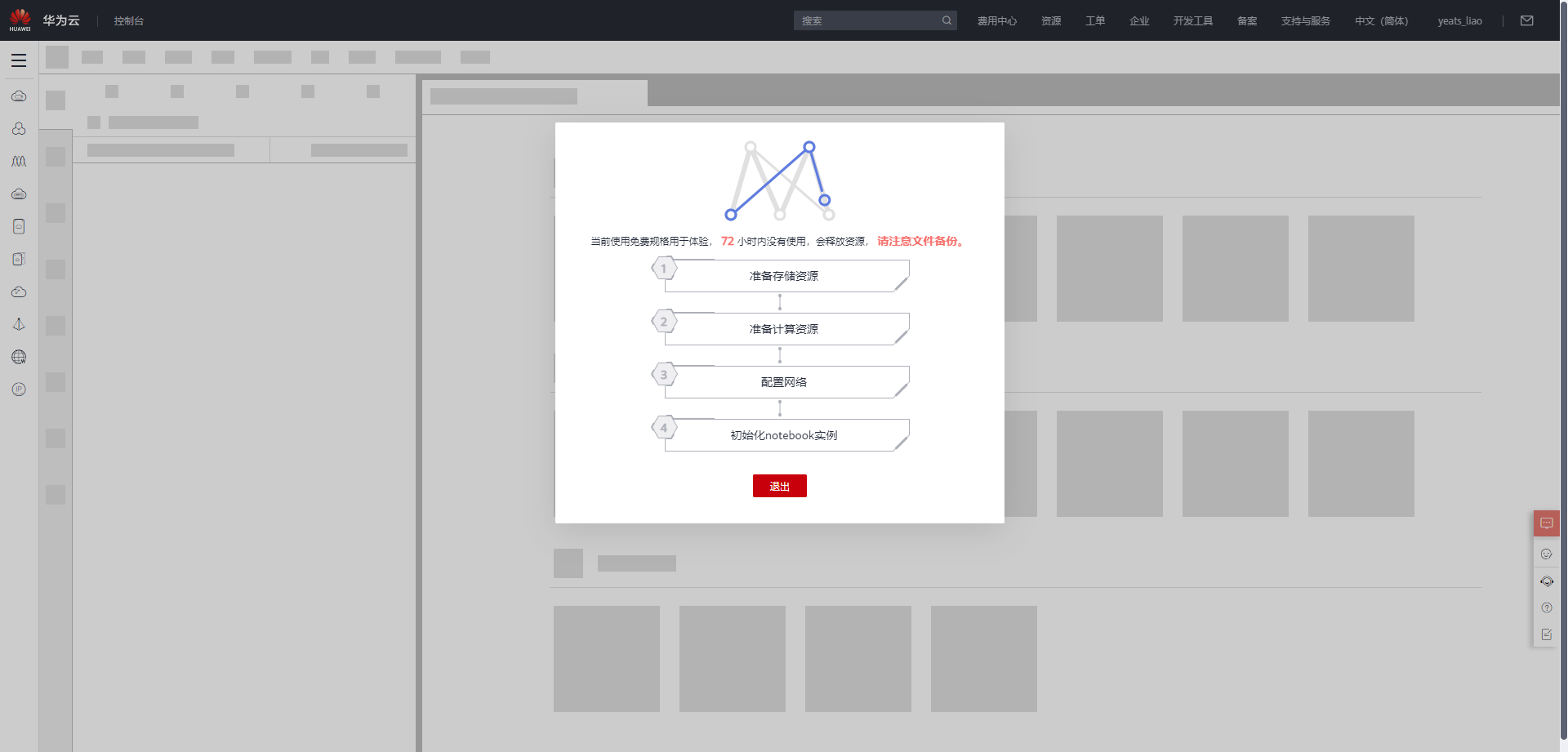
选择下方CodeLab立即体验
等待环境搭建完成
2.使用CodeLab体验Notebook实例
下载NoteBook样例代码,Pix2Pix实现图像转换 ,.ipynb为样例代码
选择ModelArts Upload Files上传.ipynb文件
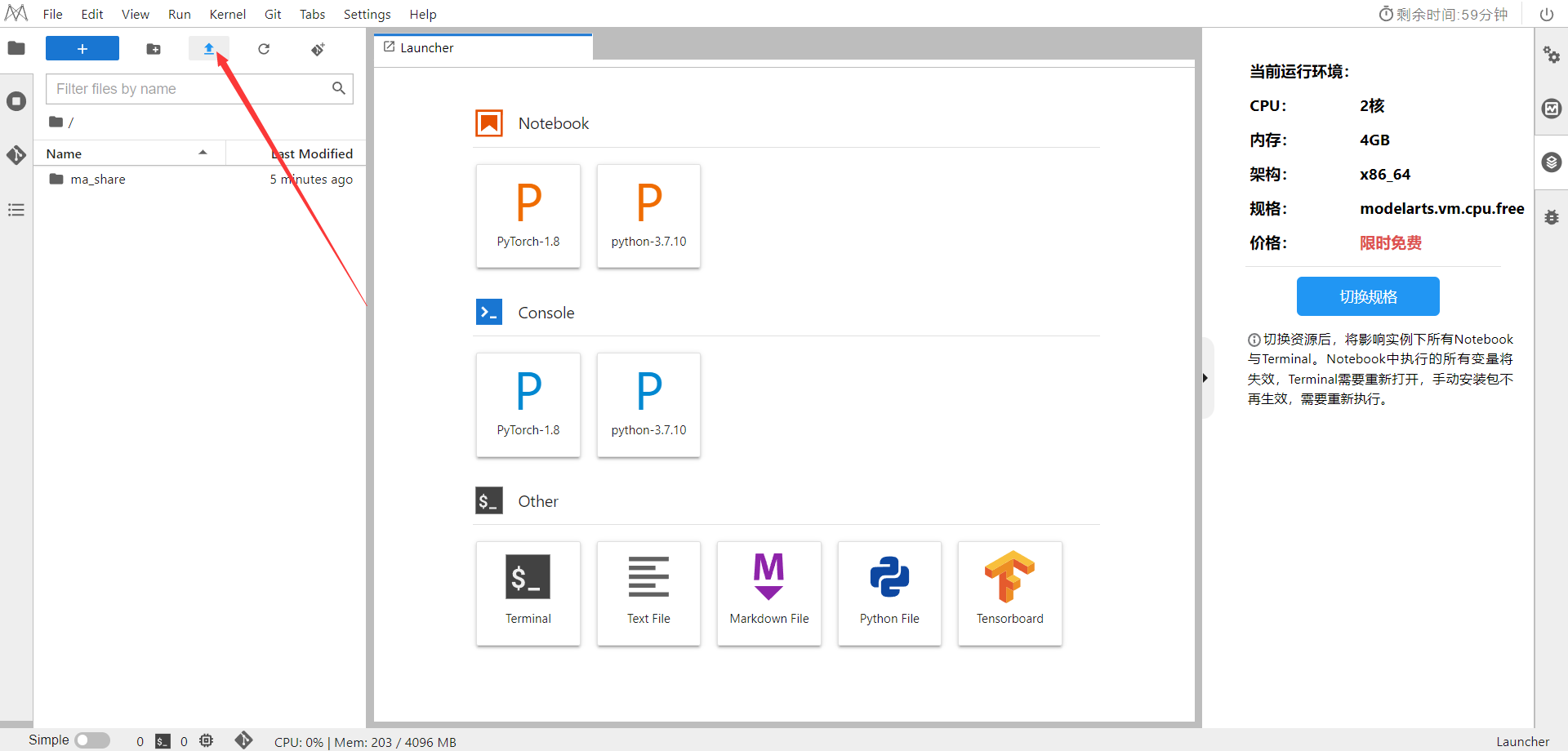
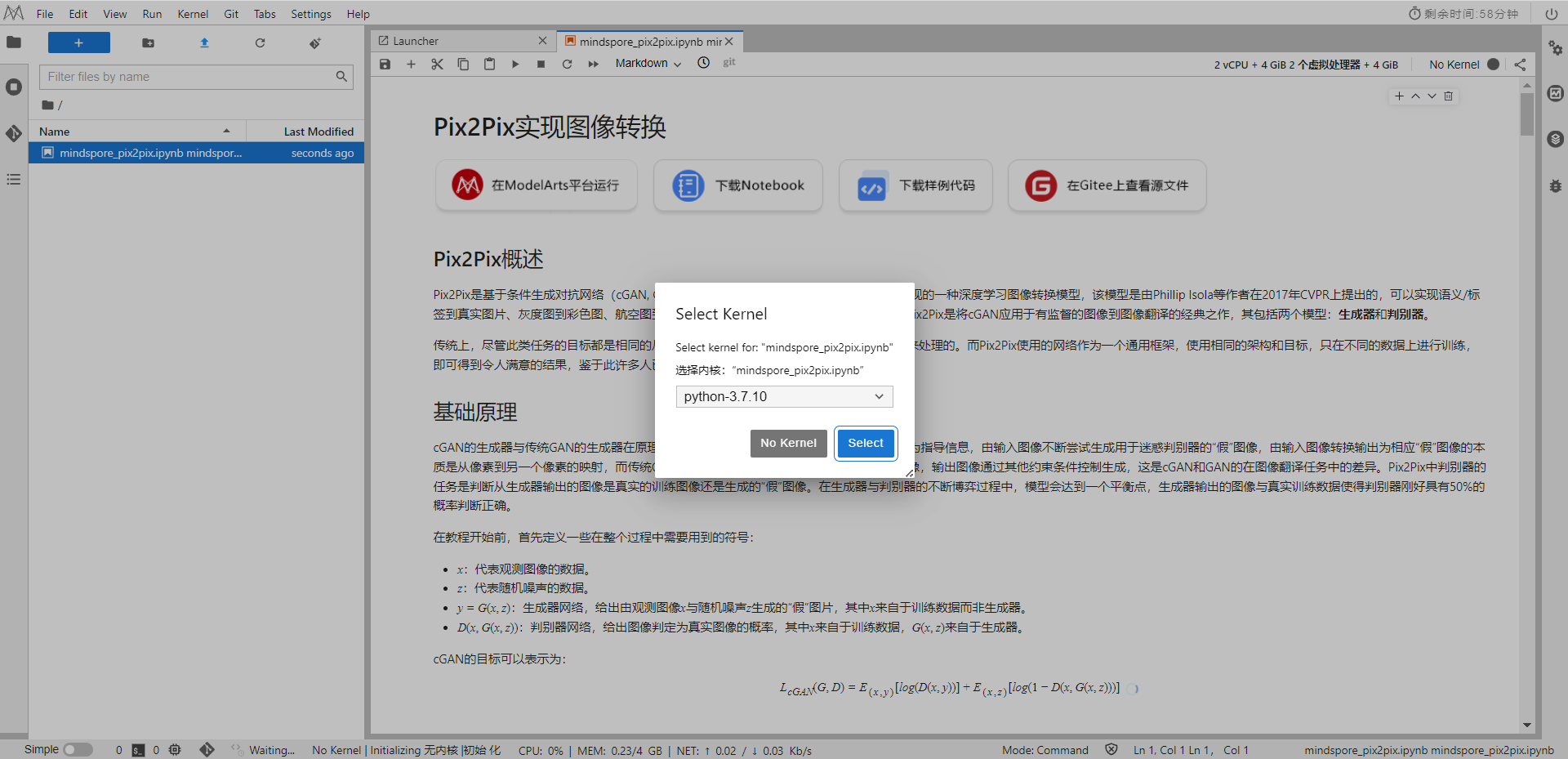
选择Kernel环境
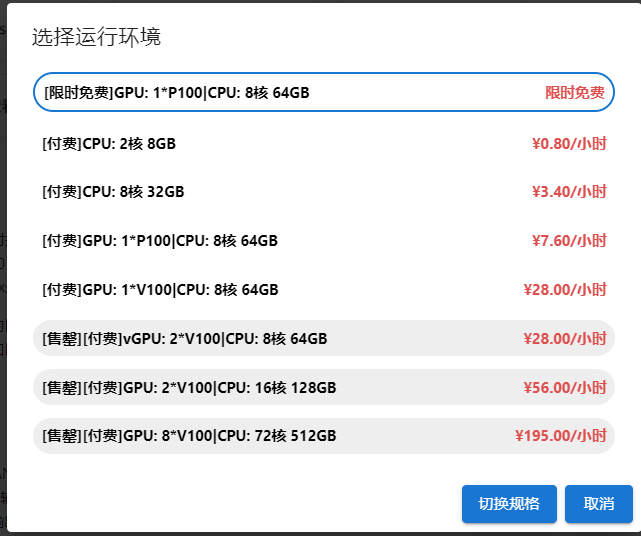
切换至GPU环境,切换成第一个限时免费
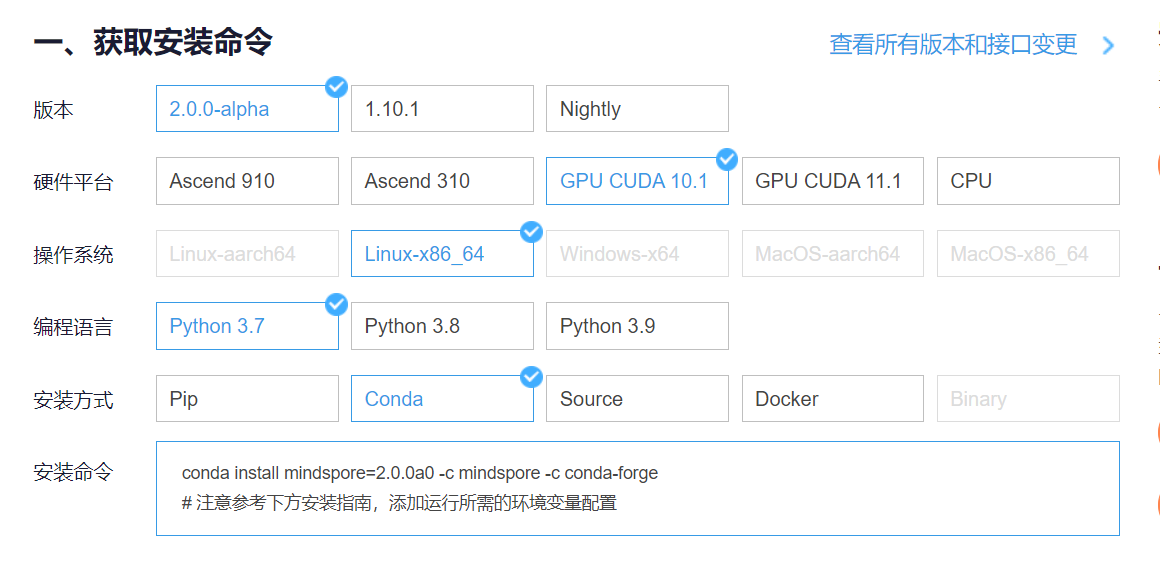
进入昇思MindSpore官网,点击上方的安装

获取安装命令
回到Notebook中,在第一块代码前加入命令
conda update -n base -c defaults conda
安装MindSpore 2.0 GPU版本
conda install mindspore=2.0.0a0 -c mindspore -c conda-forge
安装mindvision
pip install mindvision
安装下载download
pip install download