GSS7000 Ntrip 测试指南
Ntrip (Networked Transport of RTCM via Internet Protocol). (通过互联网进行RTCM网络传输的协议) 是在互联网上进行RTK数据传输的协议。
Ntrip是一个应用层协议,可以通过互联网将RTCM改正数据从参考站传输到流动站。最简单的理解NTRIP Caster,就是其接收各个基准站(连续跟踪站)数据后完成参考站(流动站)差分改正数据生成,并提供差分改正数据的网络发布。


NtripServer负责把GNSS差分数据提交给NtripCaster
NtripCaster差分数据中心,负责接收、发送GNSS差分数据
NtripClient登录NtripCaster后,NtripCaster把GNSS差分数据发送给它
NtripClient一般就是GNSS流动站(Rover)。登录NtripCaster后,发送自身的坐标给NtripCaster。NtripCaster选择或产生差分数据,然后发送给NtripClient。这样GNSS流动站即可实现高精度的差分定位。
目前国内的商用服务有三家 :千寻位置,六分科技,中国移动
GSS7000可以仿真10个基准站,可以覆盖几百公里的区域,做动态,静态的仿真不成问题。
举个简单例子,可以测试车运行120km/h 高速下 RTK 固定解效果如何。 或者仿真进入树荫,城市峡谷等弱信号情况下RTK的效果
GSS7000仿真硬件准备:
a. GSS7000 Ntrip feature PosApp V7.02 或以上
b. 一台PC电脑 安装SNIP 做Ntrip Caster (电脑需要无限制-公司的电脑有底层IT安全软件不可用)
c. 一条网线 GSS7000 REMOTE 直连到PC电脑 (中间使用路由器也可以)
d. GNSS Receiver 支持RTK (本文使用Ublox F9P EVK + Ucentor软件)

IP地址设置完毕后需要两边互ping是否通畅,如果不通检查关闭两边防火墙。
PS: 条件有限的情况下可以将SNIP安装到7000 windows 下
一,PosAPP设置
1, PosApp新建一个场景- 勾选RTCM definition- RTCM 版本—3.2

2, 选择RTCM Present —MSM Standard precision 这样具体的message会自动选择

3, 基准站Reference station- 经纬度设置为广东(23,113)则 接收机移动站离这个位置不要超过10km

4, NtripServer settings—Ntrip enable—Mount name-
Host IP 即为安装SNIP 软件的电脑IP地址

5,在realtime 内检查对应的信号开启数据—例如本文开启了GPS 和BDS
6,设置仿真载具(移动站)位置与基准站只有高度的差别—也允许位置有20KM以内

二, PC上安装运行SNIP 2.13版本



到此SNIP设置完毕, 准备完毕可以运行Posapp场景,可以忽略RTCM无串口线的提升, 正常的情况下 应该在Pushed-in steams内看到设置的挂载点数据流。

三,接收机F9P 测试Ntrip。
Ublox F9P 支持RTK, 接入的方法是通过ucentor软件
在Receiver—NTRIP Client 勾选进入设置

填写NTRIP Caster 设置

即可看到fix状态变成FIXED 定位打点圆很小

如果想查看无RTK 模式 可以取消NTRIP 等待半分钟后—定位状态变成3D模式,定位误差变大

常见报错:
1, 这是因为使用公司电脑—内有IT权限软件,会自动关闭外来端口信息。
解决方法—更换无限制电脑
2, 由于SNIP 使用的是免费版, 运行一段时间后会自动关闭
解决方法—检查SNIP软件是否停止工作
3, 如果仿真的载具移动站离开基准站(23,113)太远只能获得浮点解,甚至仅3D
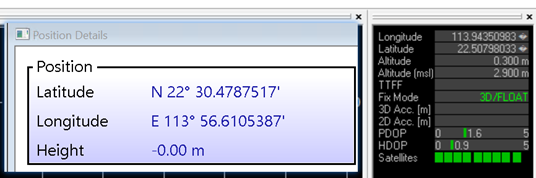
下图设置的仿真位置在赤道(0,0)

单频也有固定解

4, SNIP电脑的IP地址不建议用192.168.1网段—虽然有数据但是没有解
彩蛋— F9P 输出原始观测量,使用RTKLIB软件进行 RTK观测
1, 设置Ublox F9P 输出原始观测量 enable ubx->RXM ->RAWX(raw原始数据) 和 SFRBX(星历报文)—记住设置的com口,例如是COM5- 波特率38400

2, 在RTKLIB中打开,设置rover

3, 设置Base station

再设置一下

看效果了