10月29日,腾讯云宣布正式推出H265硬件编码器瑶池V500。据了解,作为腾讯云首款自研H265硬件编码器,瑶池V500能充分满足云游戏低时延高吞吐的需求,在同等画质情况下,可以实现带宽占用降低15%,如果是在同等带宽条件下,则能够大幅提升画质。
虽然近几年来带宽在不断增加,但高画质视频传播的需求也越来越强烈,视频编码压缩技术正是通过压缩原始视频数据量,在有限带宽下传输高画质视频的主要手段。特别是随着云游戏的兴起,如何更好的解决带宽、画质和实时传播之间的矛盾成为业界关注的焦点,不过,目前市面上的编码器,通常会为了满足实时编码要求,而对编码工具和算法做大量裁剪和简化,最终导致压缩效率低下。
为解决这个痛点,腾讯云首款自研H265硬件编码器瑶池V500,把实时编码器的压缩效率提高到了一个新的水平。
在算法上,瑶池V500完整实现了高精度运动搜索、全率失真优化、高效自适应量化等所有主流编码工具,并融合了腾讯云软件编码器码率控制等方面的领先技术,压缩效率优越;在硬件设计上,通过灵活的多核扩展架构、高性能编码流水线、层级化Memory布局等技术,很好满足了高吞吐、低时延和实时的要求。
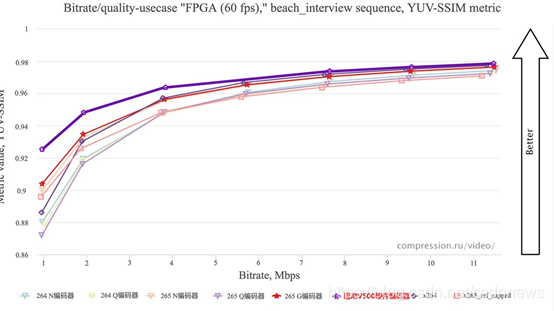
根据第三方机构MSU对市面上主流编码器的性能评测,瑶池V500在实时场景下,压缩效率大幅领先其他参测的编码器。
项目实测,瑶池V500不仅能够满足手游云游戏体验要求,且在相同画质下相比市面主流方案降低了15%带宽,如果是在相同带宽条件下,对画质的提升效果明显(如下图所示地板纹理呈现的细节更丰富结构更完整)。

除了云游戏之外,腾讯云瑶池V500硬件编码器也适用于高清直播场景。直播场景与云游戏场景不同,直播对延时要求不敏感,因此算法优化空间更大。经实测,瑶池V500在直播场景下压缩效率的优势能提升到30%,相同带宽下画质提升更加明显。

“随着5G时代的到来,云游戏、4K/8K高清直播等超高清流媒体应用越发增长迅猛,视频编码是决定体验和成本的关键技术。凭借在编码和硬件方面的多年积累,我们完全有有信心让瑶池系列为行业提供更好的视频编码解决方案,助力产业更快发展。”腾讯云副总裁娄继冰表示。
据了解,腾讯云自研H265硬件编码器瑶池V500将率先在腾讯自研的云游戏、直播等超高清流媒体业务中应用, 接下来会逐步开放给云上的客户。