目录
功能介绍
机器人工作站创建
TCP路径轨迹全局跟踪
基于事件管理器的TCP路径轨迹局部跟踪
基于Smart组件的TCP路径轨迹局部跟踪
仿真运行
功能介绍
干涉检查是虚拟仿真工作中非常重要的一个步骤,尤其是机器人工具与工件、工装夹具之间的碰撞干涉,更是重中之重。
在RobotStudio中,可以使用TCP路径轨迹跟踪功能来实现ABB机器人的干涉检查,这个功能能够在机器人的TCP运动路径上实时生成轨迹线条,通过观察轨迹线条与周边物体的交叉情况,就能快速的判断出是否发生了干涉。
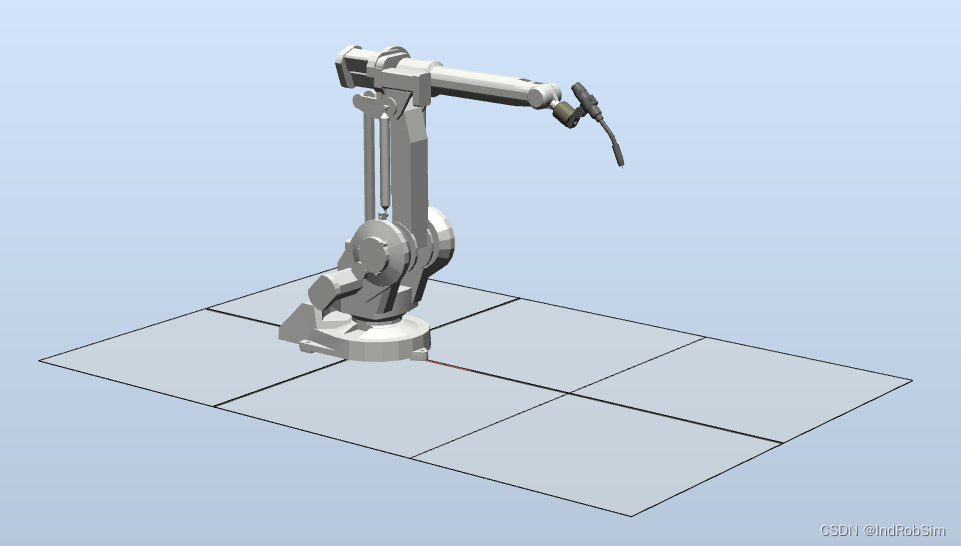
机器人工作站创建
在RobotStudio中创建简易的机器人工作站,用于显示TCP路径跟踪轨迹。从ABB模型库中添加一台机器人,并为其安装一个工具,如下图所示。
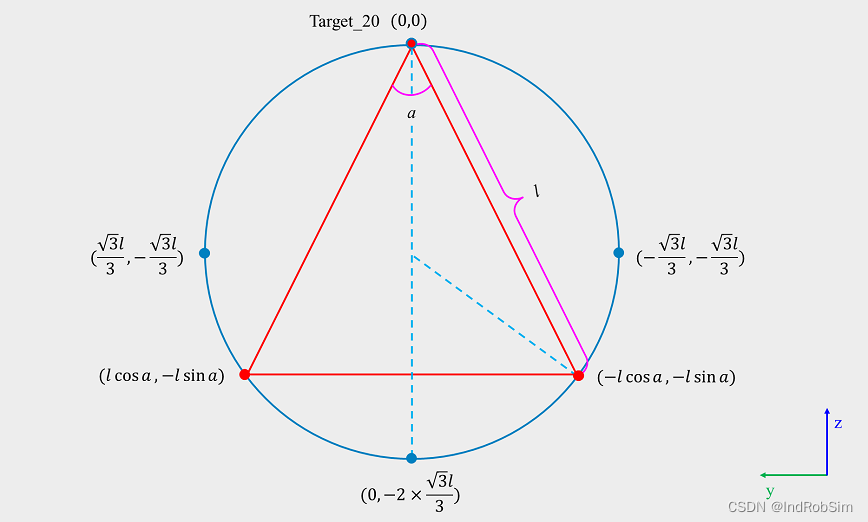
为机器人配置I/O信号,并按照下图所示的运动轨迹示教机器人程序,机器人运动轨迹为一个正三角形和三角形的外接圆,以三角形的顶点为基准点(Target_20),其他示教点均可作为其在YZ坐标平面上的偏移点,坐标偏移量公式如图中所示。
完整的机器人程序,如下图所示。
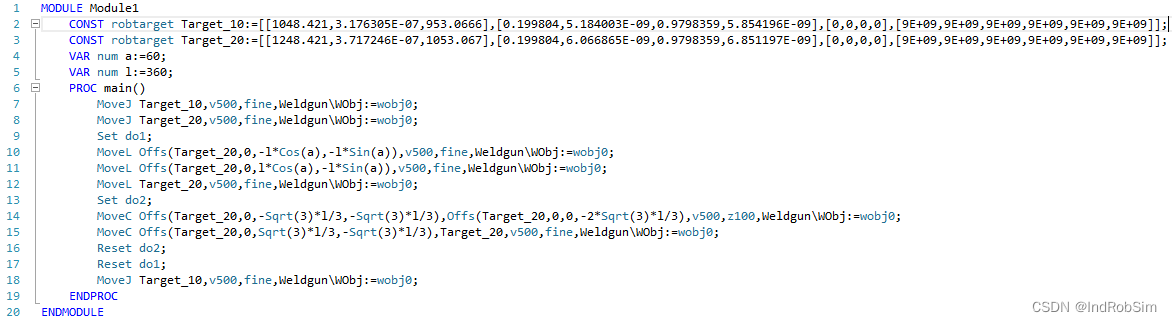
完整的程序代码,如下所示。
MODULE Module1CONST robtarget Target_10:=[[1048.421,3.176305E-07,953.0666],[0.199804,5.184003E-09,0.9798359,5.854196E-09],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];CONST robtarget Target_20:=[[1248.421,3.717246E-07,1053.067],[0.199804,6.066865E-09,0.9798359,6.851197E-09],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];VAR num a:=60;VAR num l:=360;PROC main()MoveJ Target_10,v500,fine,Weldgun\WObj:=wobj0;MoveJ Target_20,v500,fine,Weldgun\WObj:=wobj0;Set do1;MoveL Offs(Target_20,0,-l*Cos(a),-l*Sin(a)),v500,fine,Weldgun\WObj:=wobj0;MoveL Offs(Target_20,0,l*Cos(a),-l*Sin(a)),v500,fine,Weldgun\WObj:=wobj0;MoveL Target_20,v500,fine,Weldgun\WObj:=wobj0;Set do2;MoveC Offs(Target_20,0,-Sqrt(3)*l/3,-Sqrt(3)*l/3),Offs(Target_20,0,0,-2*Sqrt(3)*l/3),v500,z100,Weldgun\WObj:=wobj0;MoveC Offs(Target_20,0,Sqrt(3)*l/3,-Sqrt(3)*l/3),Target_20,v500,fine,Weldgun\WObj:=wobj0;Reset do2;Reset do1;MoveJ Target_10,v500,fine,Weldgun\WObj:=wobj0;ENDPROC
ENDMODULE机器人程序全部编写完成之后,把示教好的程序以及程序数据全部同步到工作站。
TCP路径轨迹全局跟踪
在RobotStudio中,ABB机器人TCP路径轨迹跟踪功能有两种模式:全局跟踪模式与局部跟踪模式。
全局跟踪模式,就是跟踪机器人TCP全部运动路径,并生成跟踪路径轨迹线条。
局部跟踪模式是在I/O信号的控制下,在机器人的某一段或某几段运动路径上实现TCP轨迹跟踪,同时生成跟踪路径轨迹线条。
在“仿真”菜单栏的“监控”命令组中,点击“TCP跟踪”![]() 命令按钮,弹出TCP跟踪对话框。
命令按钮,弹出TCP跟踪对话框。

对话框中各设置选项的详细介绍如下。
机器人:选定要进行TCP路径轨迹跟踪的机器人。
启用TCP跟踪:选中此复选框后,系统启动机器人TCP路径轨迹全局跟踪功能。
跟随移动的工件:选中此复选框后,激活对移动工件的路径轨迹跟踪。
在模拟开始时清除轨迹:选中此复选框后,系统会在仿真开始时自动清除上一次生成的机器人TCP路径轨迹跟踪数据(线条)。
基础色:设定生成的机器人TCP路径轨迹跟踪线条的颜色,此颜色会在选中“信号颜色”复选框后,被“色阶”里的颜色或“副色”里的颜色替换。
信号颜色:选中此复选框后,可选择I/O信号或变量作为触发事件,并根据事件的变化实时改变机器人TCP路径轨迹跟踪线条的颜色。
使用色阶:当“信号颜色”被选中,且选取的事件为连续变量或模拟量I/O信号时,此单选框可被激活。激活后,当事件发生时,机器人TCP路径轨迹跟踪线条会根据事件值在“从”与“到”之间的变化,显示出色阶中对应的颜色。
使用副色:当“信号颜色”被选中时,此单选框可被激活。激活后,当事件发生时,机器人TCP路径轨迹跟踪线条会以副色里选择的颜色显示。
显示事件:选中此复选框后,可以选择若干个事件。仿真运行过程中,当这些事件发生时,事件会以标签的形式在视图窗口内显示。
清除TCP轨迹:点击此按钮,可清除上一次生成的机器人TCP路径轨迹跟踪数据(线条)。
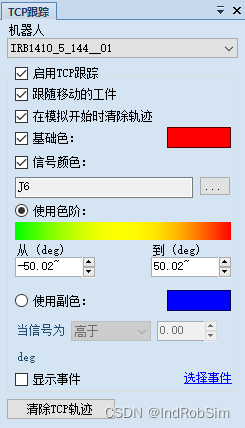
按照实际需要设置相应的TCP跟踪参数,本案例设置的机器人全局跟踪模式下的TCP路径轨迹跟踪参数,如下图所示。
基于事件管理器的TCP路径轨迹局部跟踪
ABB机器人TCP路径轨迹局部跟踪有两种实现方法,一种是使用事件管理器功能实现的,另一种是使用Smart组件功能实现的。不管是哪一种实现方法,都要事先在机器人系统中配置用于触发这个事件的数字量输出信号。
在事件管理器窗口中,添加打开TCP跟踪的事件,添加步骤如下图所示。当“do1”信号置位时,打开机器人TCP路径轨迹跟踪。

再添加一个关闭TCP跟踪的事件,添加步骤如下图所示。当“do1”信号复位时,关闭机器人TCP路径轨迹跟踪。

注:在第4步中,选择机械装置选项中,可以选择机器人或机器人工具,一般情况下都选择机器人。但是,机器人选项名称为“当前机械装置”,如图中所示,这一点要注意。
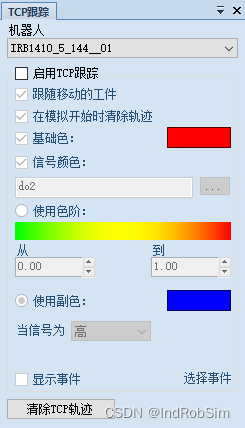
事件创建完成后,对机器人仿真运行就会生成TCP路径轨迹跟踪线条。但是,此时的路径轨迹跟踪线条是以默认颜色显示的。如果需要改变线条颜色,可以打开TCP跟踪对话框,在其中修改“基础色”或“副色”。颜色修改完成后,一定要将“启用TCP跟踪”复选框取消选中,不然就是全局跟踪模式了。
这样,仿真运行时,机器人的TCP路径轨迹跟踪线条就会以设定的颜色生成,如果有信号事件,当信号事件发生时,线条颜色也会被指定的颜色所替换。
基于Smart组件的TCP路径轨迹局部跟踪
另一种局部跟踪方法是通过Smart组件实现的,创建一个空的Smart组件,然后在“其他”选项中选择“TraceTCP”子对象组件。有了这个子对象组件,就能够控制机器人TCP路径轨迹跟踪功能的打开或关闭。
在TraceTCP子对象组件属性配置对话框中,Robot选项下选择要跟踪的机械装置,通常情况,都选机器人,如下图所示。

在Smart组件中创建一个数字量输入信号,然后将这个信号与TraceTCP子对象组件的“Enabled”接口连接起来,即通过这个信号控制TraceTCP子对象组件的是否执行。
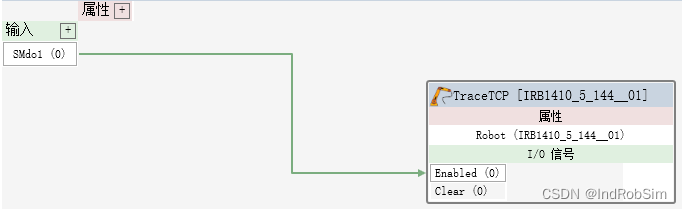
在工作站逻辑设定窗口中,将机器人的数字量输出信号连接到Smart组件的数字量输入接口上,这样机器人就能够使用I/O信号来触发TCP轨迹跟踪功能的打开与关闭了。

同样的,此时的RobotStudio只能以默认颜色生成机器人TCP路径轨迹跟踪线条。若需要修改线条颜色,可以在TCP跟踪对话框中完成,颜色修改的操作步骤与基于事件管理器的TCP路径轨迹局部跟踪中的颜色修改步骤相同。
仿真运行
对ABB机器人仿真运行,可以看到,在全局模式下,只要机器人运动,其TCP位置处就会实时生成了路径轨迹跟踪线条;而局部模式下,只有I/O信号置位时,才会生成TCP路径轨迹跟踪线条,信号复位后,TCP路径轨迹跟踪也立刻关闭。
The End
上一篇:RobotStudio教程:ABB机器人拆垛与码垛应用示教编程与虚拟仿真