参加过往届比赛的队员可以通过下面内容了解第十七届竞赛规则主要变化。如果第一次参加比赛,建议对于本文进行全文阅读。
-
竞速比赛共分为九个组别,每个组别在比赛环境、比赛任务、单片机平台、车模等方面有不同的要求;
-
比赛场地共有三种场地类型:其中室内往返和循环赛道,应用于六个室内组别比赛;室内信标组应用于两组比赛;室外操场赛道应用于一组比赛;
-
室内平衡单车组的惯量轮驱动电机允许使用无刷电机,无刷电机需需使用基于
InfineonMCU无刷驱动方案;室外极速越野允许将原车摸电机更改为无刷电机,如果改动则需要使用基于MindMotionMCU无刷电机驱动方案; -
室内无线充电组车模要求运行过程中制作
LED显示板,用以显示车模储能法拉电容电压;在无线充电组中,用于控制和电能显示电路允许使用车载电池。用于电机驱动的电源需来自于无线充电2F储能电容。 -
室外极速越野组要求车模能够具有外壳以便适于下雨天比赛要求;为了显示车模运行位置,要求车模上具有规定尺寸的旗帜;完全模型车模作品设计制作车模外壳;所有车模作品不再有尺寸限制。
-
鼓励参加智能车竞赛队伍使用
RT-Thread操作系统用于车模作品开发;相关奖励政策会有另文给出。 -
在传感器选择中,今年比赛要求其中不得包括独立的微控制器(除超声波传感器之外,室外极速越野组的IMU除外)。
-
在自制电路板中,队伍信息(学校名称、队伍名称,制作时间)
禁止放在丝网面。 -
“智能视觉组”、“完全模型组”两个赛题组包含有更加复杂的机器视觉处理和模型车运动控制任务,这两个组别比赛详细规则将会通过各自比赛细则补充文档进行说明。
-
四轮电磁组 是唯一本科与专科生分别排名发奖的组别。
-
关于举办第十七届全国大学生智能汽车竞赛的通知-加盖公章
第十七届全国大学生智能车竞赛竞赛比赛规则文档将会在 竞赛网站 正式公布。竞赛网站:

▲ 图1 全国大学生智能车竞赛网站
- 竞赛交流微信公众号:tsinghuazhuoqing
● 规则修改版本
- 版本 2022-6-21: 对于四轮电子组在后面任务说明中,补充上允许自制车模的内容。
- 版本2021-11-21:
- 修改了对于四轮电磁组要求,将其在控制器、传感器、参赛队员以及评奖说明进行修改;
- 修改智能视觉组关于车模要求,允许H/M车模信息。同时公布了《智能视觉组比赛细则文档》;
- 补增了M车模相关内容信息;
- 版本 2021-11-11: 竞速比赛的最初公开版本;
§01 前 言
全国大学生智能车竞赛是从2006开始,由 教育部高等教育司委托高等学校自动化类教学指导委员会 (教高司函[2005]201号文)举办的旨在加强学生实践、创新能力和培养团队精神的一项创意性科技竞赛,至今已经成功举办了十六届。在继承和总结前十六届比赛实践的基础上,竞赛组委会努力拓展新的竞赛内涵,设计新的竞赛内容,创造新的比赛模式,使得智能车竞赛在新时代对新工科大学生培养方面作出更大的贡献。
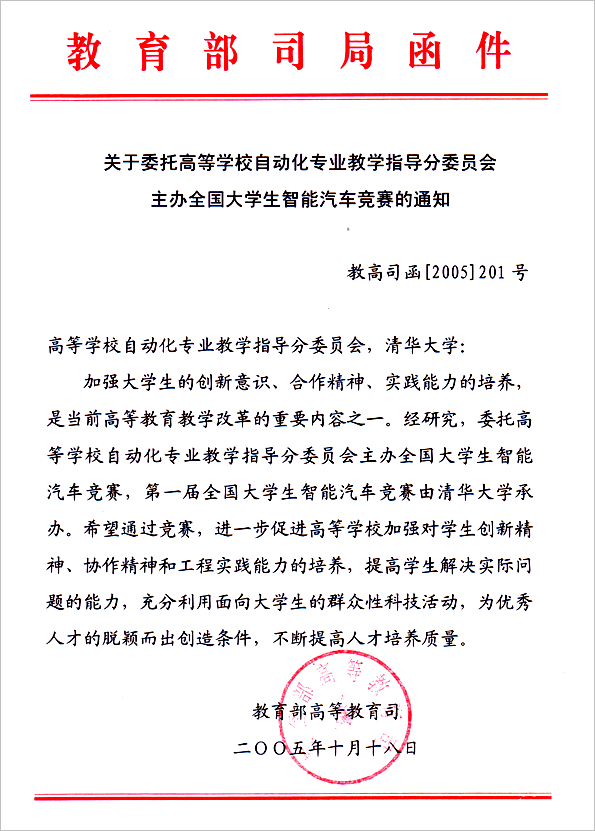
▲ 图1.1 教育部下发的全国大学生智能车竞赛通知
为了实现竞赛的"立足培养、重在参与、鼓励探索、追求卓越"的指导思想,竞赛内容设置需要能够面向高校学生和教学内容,同时又能够兼顾当今时代科技发展的新趋势。比赛形式包括有竞速比赛与创意比赛两大类。竞速比赛中包含不同的组别,难度适合高校不同年级学生参赛。在竞速赛基础上,适当增加挑战性,形成创意比赛的内容,适合部分有条件、能力强的本科、专科生和研究生参加创意比赛。
参赛选手组成参赛队伍,使用竞赛秘书处统一指定的竞赛车模套件、微控制器平台,自主构思车模控制方案进行系统设计,包括传感器信号采集处理、电机驱动、转向舵机控制以及决策算法软件开发等,完成智能车参赛作品工程制作及调试。
竞赛分为分赛区比赛和全国总决赛两个阶段。参赛队伍的名次(成绩)由赛车现场成功完成赛道比赛时间来决定。参加全国总决赛的队伍同时须提交车模技术报告。
竞赛秘书处制定如下比赛规则适用于各分/省赛区比赛以及全国总决赛,在实际可操作性基础上,保证竞赛的公开、公平与公正。
为了兼顾现在比赛规模的要求,同时避免同组别内出现克隆车的情况,便于参赛学校在有限的场地内使用兼容的赛道完成比赛准备,竞速比赛将按九个组别进行设置。各组别名称和比赛要求见下面表格。详细说明在本文档后面章节给出。
| 序 号 | 组别 名称 | 赛道 环境 | 任务描述 | 传感器 | MCU平台 | 车模 |
|---|---|---|---|---|---|---|
| 1 | 四轮 电磁组 | 室内 循环 赛道 | 1.从赛道旁车库出运行两周后入库; 2.计时标准:从出库到入库的时间间隔; | 1、电磁;2、光电管; | 1.STC; 2.允许使用MicroPython完成车模制作 | 1.B,C; 2.允许自制车模; 说明:这是唯一个本科与专科分别进行排名的组别。 |
| 2 | 四轮 摄像头组 | 室内 往返 赛道 | 1.从赛道旁车库出发,左右到达赛道端点返回后入库; 2.计时标准:从出库到入库的时间间隔; | 1.摄像头、CCD、光电管; 2.不允许使用电磁导航; | Infineon | C/B |
| 3 | 多车 编队组 | 室内 循环 赛道 | 1.头车从车库出发,尾车在赛道上跟随,车队运行两周,头车回到车库,尾车停在赛道上; 2. 路经三岔路口中间车插入车队; 3.第二次途径三岔路口,中间车停回三岔路口另外一边; 4.计时标准:车模出库到返回车库时间间隔+5倍尾车与头车时间差(两次); | 1. 摄像头、CCD、光电管、电磁; 2.车模之间限定使用沁恒蓝牙组网模块实现多车通信; | 1. 头车:WCH; 2.跟随车:WCH,STC | 1.头车:C/B; 2.跟随车:自制车模 |
| 4 | 平衡 单车组 | 室内 循环 赛道 | 1.从赛道旁车库出发,沿着赛道运行一周后返回入库; 2.计时标准:从出库到入库的时间间隔; | 1.摄像头,CCD,光电管,电磁 | Infineon | 1.K车模; 2.车模上动量轮驱动允许采用无刷电机,采用Infineon无刷电机驱动方案; 2.允许增加动量轮,动量杆 |
| 5 | 无线 充电组 | 室内 往返 赛道 | 1. 车模完成从车库出发赛道往返两周入库; 2. 车模上储能电容上限小于2F; 3.赛道上(包括车库)设置3 ~ 4个无线充电线圈; 4.计时标准:从出库到入库时间间隔; 5.车模上要求显示储能电容电压; | 1.摄像头,CCD,光电管 | Infineon | 1.F/G车模; 2.用于车模控制,显示电压等电路允许使用电池供能;车模电机、舵机所需要的电源则需要来自于储能2F电容。 |
| 6 | 平衡 信标组 | 室内 信标 场地 | 1.在信标场地内完成信标灯搜索灭灯; 2.计时标准:从第一个灯点亮到最后一个灯熄灭位置时间间隔 | 1.摄像头,CCD,光电管 | MindMotion | D/E车模 |
| 7 | 智能 视觉组 | 室内 信标 场地 | 1.场地内存在Apriltag标识物,位置已知; 2. 场地内随机放置5 ~ 10 个图片内容,位置已知; 3.车模从出发点出发后,依次找到图片位置并现实识别内容; 4.根据识别大类,将图片(带有磁性)搬运到赛道指定位置; 5.从车模出发开始计时,到完成所有任务结束所用时间. | 1.摄像头,光电管,HALL | NXP | H/M车模 |
| 8 | 极速 越野组 | 室外 操场 跑道 | 1.沿着操场赛道,或者封闭环形街道运行一周; 2.计时标准:车模从起点到终点运行时间间隔; 3.预赛采用单独排位赛;决赛采用同时出发对抗比赛; | 1. GPS,摄像,光电管,IMU等 | MindMotion | 1.L车模; 2.允许改动L车模电机,使用无刷电机;电机驱动方案采用MindMotion的无刷电机驱动方案。 |
| 9 | 完全模型组 | 室内 循环 赛道 | 1.从停车场(非传统车库)出发回到停车场计时比赛; 2.赛道元素以及场内元素都通过人工神经模型完成; 3.任务另文详细说明。 | 1.摄像头+EdgeBoard | 1.车体控制:Infineon; 2.识别:EdgeBoard | I 车模 |
§02 比赛器材
一、车模
1、车模种类
竞速组比赛车模包括有指定标准车模和自制车模两大类。
指定标准车模规格和生产厂家信息请参见 附录1:车模信息 。自制车模可用于多车编队、四轮电磁 组,由参赛队伍根据竞赛任务自行设计制作,对于车模尺寸、规格没有限制。
参赛队伍需要按照不同组别指定的车模制作参赛作品。
2、车模修改要求
指定车模作为比赛统一平台,对于车模的机械的调整与修改有着严格要求。具体要求参见 附录2:车模修改要求。除此之外,竞赛车模完成作品不再有尺寸限制。
二、电子元器件
1、微控制器
按照不同赛题组别,竞赛车模主控电路分别采用英飞凌公司(Infineon)、宏晶公司(STC)、灵动微电子(MindMotion)、沁恒微电子(WCH)、恩智浦(NXP)出品的微控制器作为车模中主要可编程主控制器。车模中所使用的微控制器的数量没有限制。
(1)Infineon微控制器
- TC264 , TC212
- TC377 , TC364
- 此外还允许使用Infineon出品的Aurix️™系列TC2XX和TC3XX其它型号的单片机
(2)STC微控制器
- STC8H8K64U-45I-LQFP64 / LQFP48
- STC8A8K64D4-45I-LQFP64 / LQFP48 / LQFP44
- STC8H3K64S4-45I- LQFP48 / LQFP32
- STC16F40K128-LQFP64 / LQFP48
- STC32G12K128-LQFP64 / LQFP48, STC32G 要 2022/1 才送样,优先推荐 可以 USB 仿真 的 STC8H8K64U-45I-LQFP64/LQFP4
(3)MindMotion微控制器
- MM32SPIN27PS 96MHz M0
- MM32F3277G9P120MHz M3
(4)WCH微控制器
- CH32V307
- CH573 系列蓝牙芯片用于多车编队中无线通讯
此外推荐使用CH9141系列低功耗蓝牙串口透传芯片。
(5)NXP微控制器
- 限定使用NXP公司微控制器。
2、图像处理平台
在比赛中允许使用图像处理平台包括:
- 基于NXP公司微控制器的 OpenMV,OpenART:用于智能视觉组车模制作;
- 百度公司的EdgeBoard:用于百度全模型赛题车模制作;
3、软件平台
(1)嵌入式操作系统:
车模作品单片机中如果使用的嵌入式操作系统要求为:RT-Thread。
(2)MicroPython
在车模作品开发中,允许使用MicroPython语言作为MCU软件辅助开发工具。
4、传感器
1、传感器的种类需要根据不同竞赛组别而进行的选用。具体请参见"比赛任务"中关于各比赛组别所允许使用的传感器类型说明。
2、传感器的数量由参赛队伍自行确定,不再限制。
3、选用的传感器或者其它电子部件中不得包括独立的微处理器,超声波传感器,室外极速越野组中的IMU传感器除外。
4、针对某些特殊电子模块的允许使用或者禁止使用组委会将会另行公布相应器材清单进行说明。
三、电机与电磁铁
1、伺服电机
- 定义: 车模上的伺服电机是指除了车模原有驱动车轮的电机之外的电机,包括舵机、步进电机或者其它种类的电机。

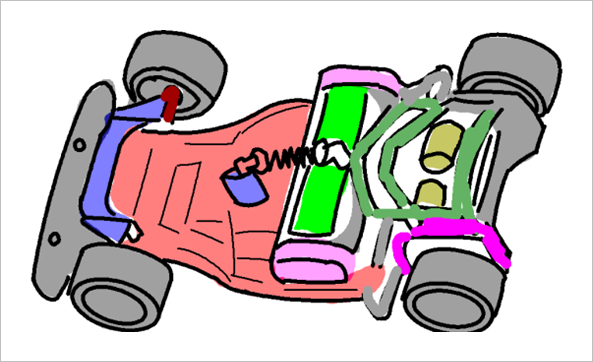
▲ 图2.3.1 车模上的伺服电机
-
数量限制: 车模上的伺服电机数量不能够超过三个,其中包括转向控制舵机。转向舵机只允许使用原车模配的舵机型号,且只允许使用一个舵机。
-
功能限制: 车模上的额外增加的伺服电机只能用于控制车模上的传感器的方位,或者改变车模底盘姿态。不允许直接或者间接控制车模的转向、改变车模车轮速度。
2、无刷电机
允许在室外越野组使用无刷电机用于车模行进驱动,或者平衡电车组车模平衡动量轮驱动。允许对原有车模电机更改成无刷电机。平衡单车组组中的无刷单机驱动需要采用Infineon无刷电机驱动方案;极速越野组无刷电机驱动需要采用MindMotion无刷电机驱动方案。
3、电磁铁
室内智能视觉组来拾取目标板可以使用电磁铁。对于电磁铁的型号没有限制。
四、电池
车模驱动电池允许使用镍氢、镍铬、锂电池,电池最高电圧小于等于 24V 。
车模上应该只具有一组电池,无线充电组允许配备储能法拉电容。
在无线充电组中,在无线充电组中, 车模中的舵机与驱动电机的电能不允许使电池,但车模中弱电电路(控制电路、LED显示电路等)可以使用电池供电。车模运动和控制电能来自于无线充电存储在车模储能法拉电容中的电能。无线节能组的法拉电容要求串联后总容量低于 2法拉 ,最高充电电压小于 12V 。
五、电路板
竞赛智能车中除了以下几类电路之外,所有电路均要求为自行设计制作,禁止购买现成的功能模块。
- 单片机最小系统的核心子板;
- 加速度计、陀螺仪、超声波集成电路板;
- 摄像头、舵机、TOF自身内置电路;
购买的单片机最小核心子板上,只允许带有单片机、时钟、电源以及单片机调试接口。其它连接外部传感器、SD卡、液晶显示等电路结构都需要通过自制电路主板引出,不允许直接从最小核心板引出。
自制的PCB板包括但不限于传感器及信号调理、电源管理、电机驱动、主控电路、调试电路等。如果自制电路采用工厂加工的PCB印制电路板,需要在除丝网层之外的其它醒目位置放置本参赛队伍所在学校名称、队伍名称、参赛年份,队伍信息需要能够便于观察。对于非常小的电路板可以使用名称缩写,名称在车模技术检查时需要直接可见。如果电路板的面积小于1平方厘米,可以不用带有队伍特有信息。
§03 比赛环境
一、赛道
1、赛道材质
室内赛道包括两种形式:往返赛道和循环赛道。具体规格和元素见后文介绍。赛道采用PVC耐磨塑胶地板材料制作,材料与前几届比赛相同。
在室内信标组、智能视觉组节能信标组没有固定赛道,地面材质没有特别指定。室外极速越野组不铺设专用赛道,使用标准的操场跑道或者封闭的街道进行比赛。
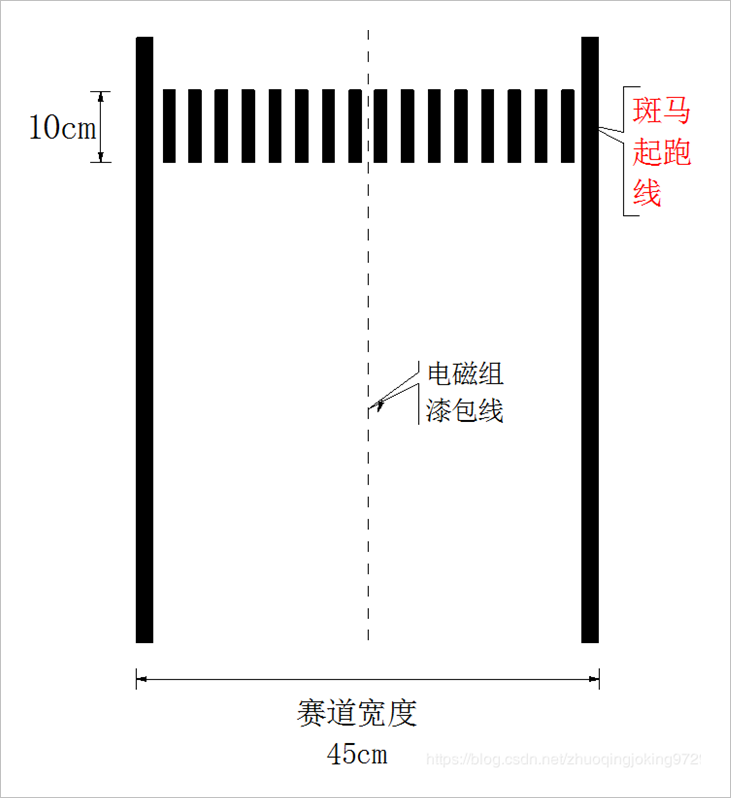
2、赛道规格
赛道规格包括赛道的尺寸、形状、间距等。室内赛道宽度(包括黑色边界引导线)不小于45cm。预赛阶段的赛场形状为边长约5m×7m见方决赛阶段的赛场约为预赛阶段的两倍。两条相邻赛道中心线之间的间距不小于60cm。赛道中存在着直线、曲线、十字交叉路口等。曲线的曲率半径不小于50cm。如下图所示:
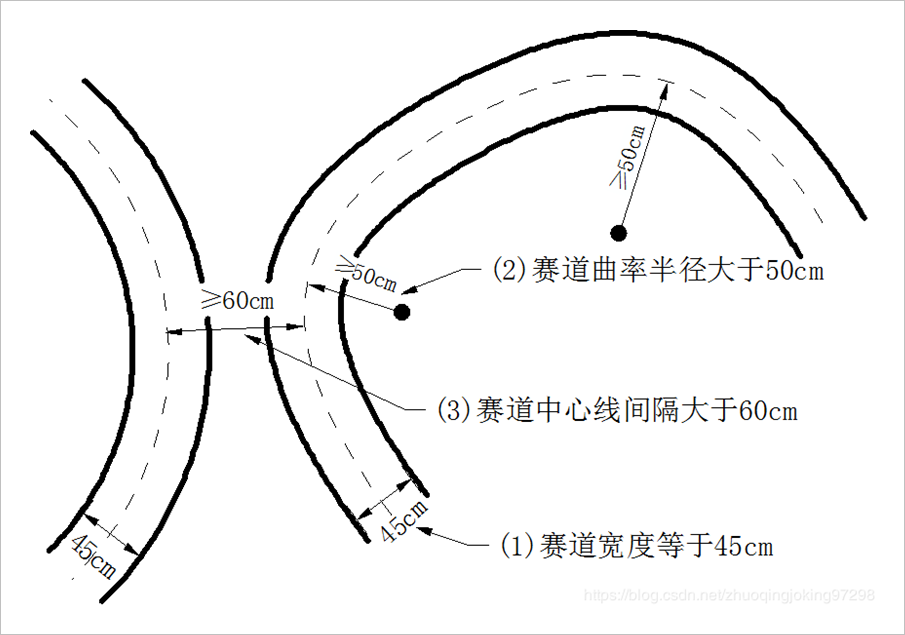
▲ 图3.1.1 赛道基本尺寸
3、导引方式
室内循环赛道上都具有边界线和电磁引导线。室内往返赛道则只有边界线,不再铺设电磁引导线。在信标场地中使用圆形发光信标作为车模导引方式;在智能视觉组则使用Apriltag立方体作为导引方式。室外极速越野组则依靠GPS,惯性导航以及视觉完成车模引导。
(1)赛道边界线
赛道两侧铺设有黑色边界线用于赛道引导。边界线的宽度为25±5mm。如下图所示:

▲ 图3.1.2 赛道边界线引导
室内赛道组别要求车模在运行过程中保持在赛道内。在赛道边缘处有可能粘贴两层黑色高密度海绵条,形成赛道路肩,作为赛道边界。也有可能不粘贴黑色高密度海绵条。海绵条宽度为2.5cm,两层总高度超过1cm。在赛道两侧相隔25cm粘贴,交错分布,间隔处仍为黑色边界。如下图所示:

▲ 图3.1.3 赛道路肩
带有路肩赛道将会使用人工进行判罚车模是否冲出赛道,判罚方式和标准与以前比赛形式相同。
(2)电磁引导线
赛道铺设有中心电磁引导线。引导线为一条铺设在赛道中心线上,直径为0.1~1.0mm的漆包线,其中通有20kHz、100mA的交变电流。频率范围20k±1kHz,电流范围100±20mA。
参赛队伍可以使用自行制作的信号源。信号源通过单通道耳机插头直接插入现场信号源的插座中,即可替代缺省的信号源,为场地内的电磁导线提供信号激励了。
选手自带信号源所使用的信号频率、波形和幅度没有任何限制,只要能够满足当前铺设的电缆和插座中允许的最大电压、电流和频率范围即可。

▲ 图3.1.4 外接信号源接口示意图
(3)信标灯引导
在平衡信标组中使用信标灯引导车模行进。在铺有蓝色广告布的平整场地内随机安放3至10左右的信标,车模在信标的导引下做定向运动。第十七届的信标主要通过信标灯光信号引导。关于信标的具体技术参数和制作方案参见《第十七届智能车竞赛信标比赛系统说明》。
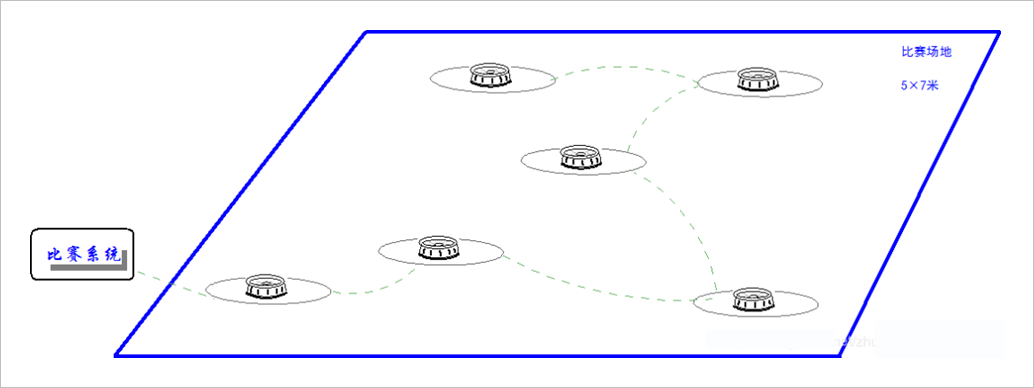
▲ 图3.1.5 信标引导比赛场地
4、起跑线
室内赛道竞速比赛要求车模在比赛完毕后,能够自动停止在赛道旁的车库内。车库对着的赛道上铺设有斑马线。
(1)斑马起跑线
斑马线起跑线 如下图所示,计时起始点处有一个宽度为10cm黑色斑马线,斑马线使用与赛道黑色边线一样的材料制作。
▲ 图3.1.6 斑马起跑线
(2)永久磁铁
永久磁铁: 在赛道中间安装有永久磁铁。磁铁参数:直径7.5 - 15mm,高度1-3mm,表面磁场强度3000-5000高斯。
起跑线附近的永磁铁的分布是在跑道中心线两边对称分布。相应的位置如下图所示:
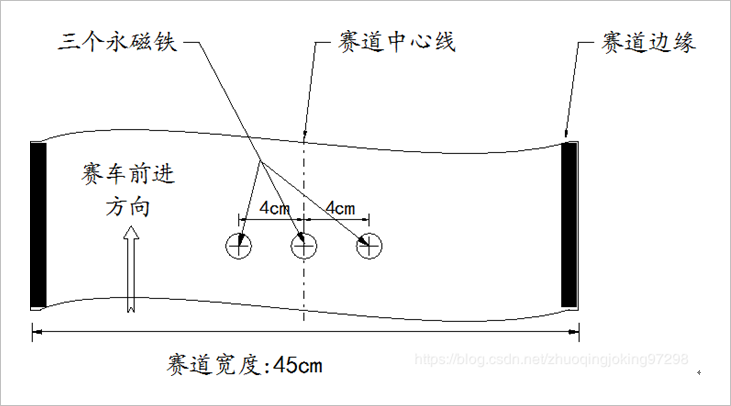
▲ 图3.1.7 永久磁铁标志
(3)车库
车库: 车库赛道元素是在起跑线旁设置的方形区域,它的尺寸如下图所示:

▲ 图3.1.8 赛道车库
车模出发是从车库驶出,在运行两周之后在驶入车库内。比赛时间是从车模驶出车库和返回车库之间的时间差计算。因此计时线圈是放置在车库门口处。赛道上的斑马线和斑马线下的磁铁放置与往届规则相同。
车模出发和返回进入车库
5、赛道元素
室内赛道,包括往返赛道与循环赛道,具有以下赛道元素。
注:赛道元素中的示意图:图例中除了赛道之外的交通标示只是用于赛道元素功能说明,在比赛现场的赛道周围没有这些交通标示。
(1)直线赛道
这是赛道的基本形式。

▲ 图3.1.9 直线赛道示意图
(2)曲线弯道
赛道中具有多段曲线弯道。这些弯道可以形成圆形环路,圆角拐弯,S型赛道等。赛道中心线的曲率半径大于50厘米。
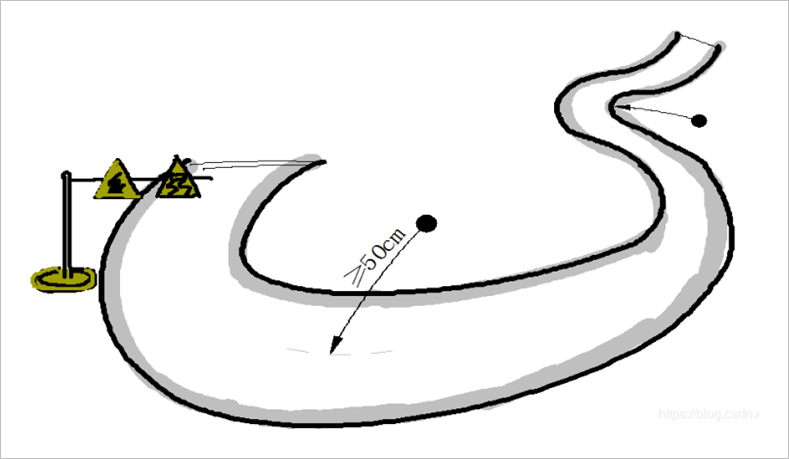
▲ 图3.1.10 弯道赛道示意图
(3)交叉路口
车辆通过十字交叉路口需要直行,不允许左转、右转。

▲ 图3.1.11 十字路口示意图
在室内往返赛道中,将十字路口在某一出口去除,形成丁字路口,此时车模需要完成左转或者右转。
(4)坡道
坡道的坡度不超过20°。坡道可以不是对称的。坡道的过渡弧长大于10厘米。坡道的长度、高度没有限制。一般情况下坡道的总长度会在1.5米左右。电磁组的导引线铺设在坡道的表面。
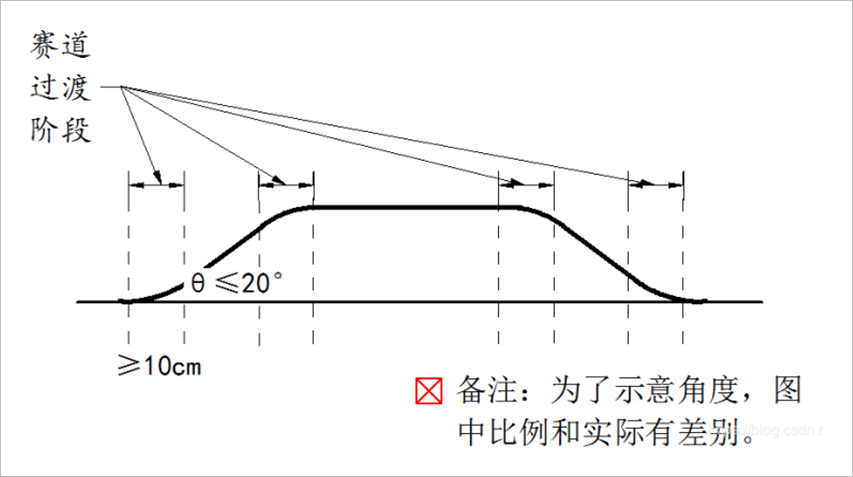
▲ 图3.1.12 坡道示意图
(5)环岛
赛车经过环岛时需进入环岛绕行一周后继续前行。环岛中心线半径不小于50厘米。电磁导线也是在环岛绕行一周。
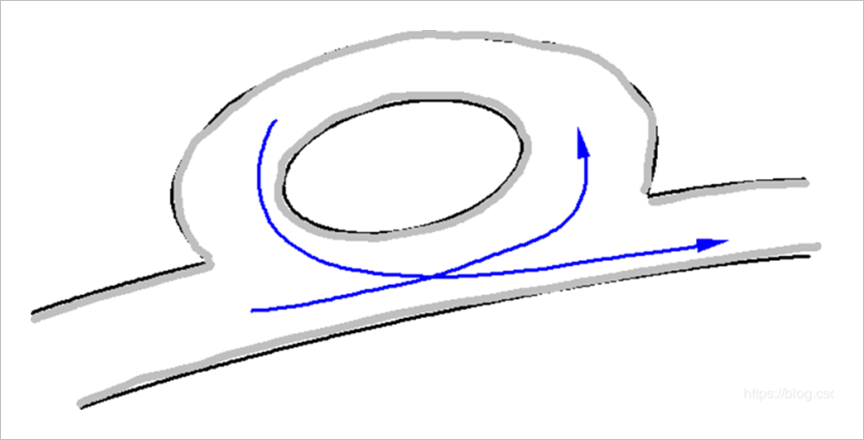
▲ 图3.1.13 环岛示意图
(6)三岔路口
在赛道上存在两个三岔路口,路口之间直线距离小于三米。三岔路口的三条进出口之间的夹角为120°。

▲ 图3.1.14 三岔路口示意图

▲ 图3.1.15 三叉路口示意图
比赛中,车模将会沿着赛道运行两周,每次途径三岔路口时,分别选择其中一条路径驶过,车模将会在三岔路口两进两出。除了三岔路口之间的赛道外,赛道的其它路径车模将会行驶两遍,在一定程度上增加了赛道的利用率。

6、两种室内赛道
(1)环形赛道
环形赛道是由赛道元素形成一个封闭赛道,如下图所示。比赛时,车模需要运行两周。

▲ 图3.1.16 室内循环赛道示意图
(2)往返赛道
室内往返赛道是在循环赛道的基础上,将两个十字回环赛道的出口使用与赛道背景颜色相同的蓝布临时堵上,车模需要从改十字回环原路返回来时的赛道,从而形成往返赛道。

▲ 图3.1.17 室内往返赛道示意图
比赛时的往返赛道可能会根据实际场地的情况铺设成长条形式,如下图所示:

▲ 图3.1.18 比赛时往返赛道示意图
二、比赛场地
1、赛道地面
赛道场地地面平整。如果地面是平滑的水泥、水磨石、大理石地面则可以直接安装。
地面颜色要求:与白色赛道有一定的色差,颜色可以根据现场底板的情况确定。一般情况下会采用蓝色的广告布铺设赛道背景颜色。具体比赛现场的赛道背景颜色将会在正式比赛前一个月进行正式公布。
室外极速越野,一般选择在操场或者封闭的马路上进行,对于地面没有特殊的要求。
2、赛道环境
赛道竞速组、信标与智能视觉组一般会安排在室内场地,在比赛中对于光线没有限制,不会有阳光直射在赛场内。室外比赛过程中,如果遇到严重恶劣天气(大雨、大风、冰雹、酷暑等)会暂停比赛。对于轻微下雨天气,比赛会继续进行。
3、赛场围挡
室内比赛场地四周铺设围挡。围挡距离赛道大于50厘米。围挡高度不小于30厘米。围挡的材质可以使用长方体泡沫塑料块,也可以使用宣传布。
三、裁判系统
比赛所使用的计时裁判系统将会实时自动测量车模运行时间。
1、计时磁标
比赛采用磁场感应方式记录车模通过赛道起跑线的时刻,或者检测车模是否运行在信标周围22.5cm范围内。感应线圈布置在赛道下面以及信标周围,对于运行车模干扰小,同时车模也不容易冲撞计时系统。如下图所示:
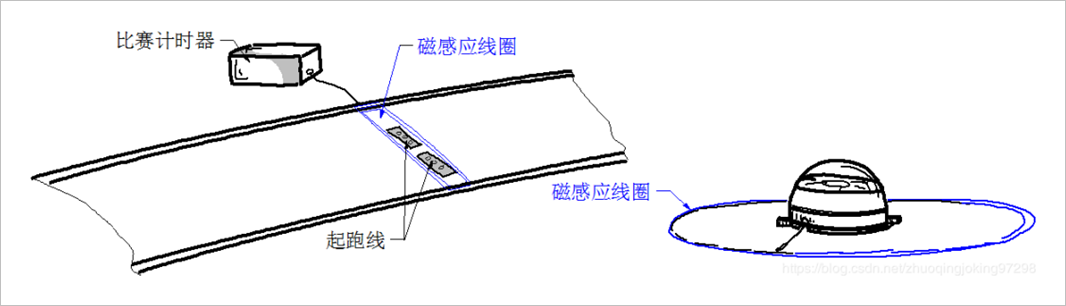
▲ 图3.3.1 基于电磁感应的计时系统
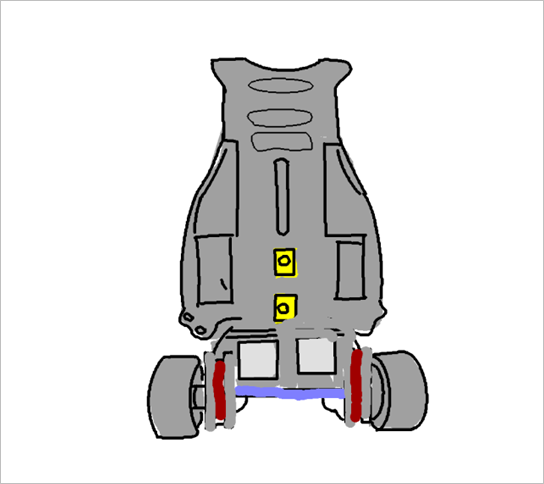
为了能够触发计时系统,需要在车模底盘安装一块永磁铁作为标签。永磁铁距离地面高度在2cm以内。由于该磁标体积很小,所以提高了车模检测位置的精确度。具体按照方式如下图所示:
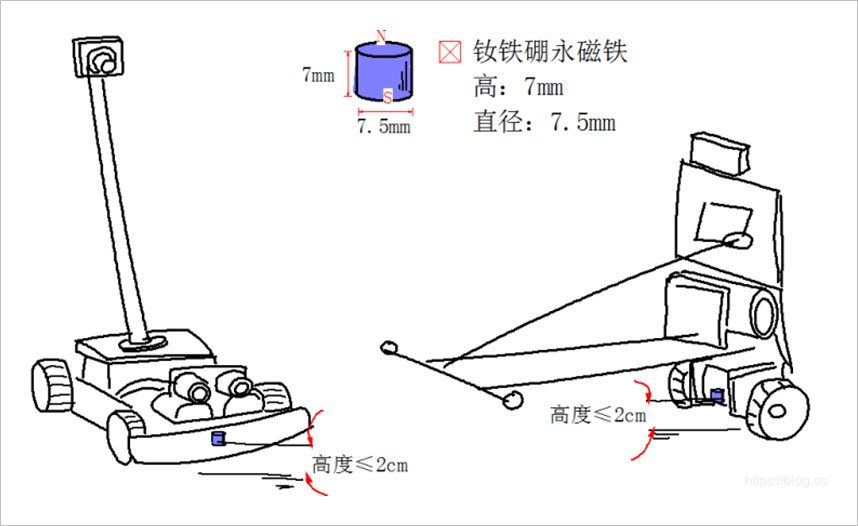
▲ 图3.3.2 车模上安装的永磁计时磁标
计时磁标可以永久粘在车模的底盘上,也可以在比赛前临时固定在车模的底盘或者电机上。具体磁标固定的位置并不要求精确,计时的过程是检测该磁标前后通过磁感应线圈的时间间隔。
车模上的永磁标记由参赛车模自行准备,在比赛之前固定在车模上即可。
根据不同的比赛场景,比赛系统也可能会采用光电计时或者手工计时,届时车模就无需进行任何的改动,或者安装计时磁标。
2、计时系统
比赛计时系统、信标控制系统由竞赛组委会在现场统一安置。
参赛选手在平时训练的时候,可以自行设计制作简化的比赛系统辅助进行调试车模。也可以参照竞赛组委会提供 《第十七届智能车竞赛比赛系统说明》 来进行设计制作。
§04 比赛任务
本节将就各个组别所能够使用的车模、传感器以及比赛所需要完成的任务指标进行介绍。
一、四轮电磁组
1、车模
车模可以使用竞赛指定B/C型车模中,也可以自制车模,车模运行方向不限。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
车模微控制器使用STC系列单片机。
允许使用各电磁传感器件、光电传感器进行赛道和环境检测。
3、赛道与比赛任务
比赛是在室内循环赛道上进行,赛道采用黑色赛道边线,赛道上铺设电磁引导线。
选手制作的车模完成从车库出发在运行两周后,然后在返回车库。
比赛时间从车模驶出车库到重新回到车库为止。如果车模没有能够停止在车库内停车区内,比赛时间加罚五秒钟。
计时标准:车模出库到返回车模之间的时间差。
说明:四轮电磁组是唯一一个本科与专科学生分别进行排名发奖的组别。
二、四轮摄像头组
1、车模
车模可以使用竞赛指定B/C型车模中,车模运行方向不限。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
车模微控制器使用Infineon系列单片机。
允许使用各类红外光电、摄像头、激光、超声传感器器件进行赛道和环境检测。由于往返赛道上不不铺设电磁线,所以不允许使用电磁检测赛道。
3、赛道与比赛任务
比赛是在室内往返赛道上进行,赛道采用黑色赛道边线,不再铺设电磁引导线。
选手制作的车模完成从车库出发在赛道上往返一周后,然后在返回车库。
比赛时间从车模驶出车库到重新回到车库为止。如果车模没有能够停止在车库内停车区内,比赛时间加罚五秒钟。
计时标准:车模出库到返回车模之间的时间差。
三、多车编队组
1、车模
车模包括三辆车模完成编队行进。其中头车车模为B/C型车模,两辆跟随车模(中间车,尾车)使用自制车模。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
头车限定使用WCH单片机;两辆跟随车模限定使用STC、WCH单片机,其中尾车中至少有一辆车模使用STC单片机。
车模之间如果使用通讯模块,限定使用沁恒公司提供的蓝牙组网模块。
车模允许使用摄像头、CCD、光电以及电磁传感器感知赛道位置。
3、赛道与比赛任务
比赛赛道是在室内循环赛道上进行,赛道上铺设有电磁线。
比赛开始前,头车停在车库中,尾车停在斑马线一米之内的赛道上,中间车停止在三岔路口的一侧支路上。
比赛开始后,头车从车库出发,尾车在赛道上跟随。路经三岔路口时,中间车在三叉路口出口时插入车队;第二次途径三岔路口,中间车停留在三岔路口另外一边;头车、尾车继续行进。头车最后入库,尾车经过起跑线停留在起跑线之后一米范围内。
计时标准:车模出库到返回车库时间间隔+5倍尾车与头车时间差(两次);
四、平衡单车组
1、车模
单车使用K型车模。在车模上允许使用动量轮,动量杆维持车模平衡。如果采用无刷电机驱动动量轮,则需要使用基于Infineon的驱动方案。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
车模微控制器采用Infineon单片机。
传感器允许使用摄像头、CCD、光电管、电磁等。
3、赛道与比赛任务
比赛赛道采用室内循环赛道,赛道上铺设有电磁引导线。
车模从车库出发,在赛道上运行一周后,最终驶入车库。
计时标准:车模从车库驶出到重新驶入车库之间的时间差。
五、无线充电组
1、车模
车模使用三轮车模,包括F/G型两款车模。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
车模微控制器使用Infineon微控制器。
感知赛道的传感器允许使用摄像头,CCD,光电管等。
用于储能的法拉电容的容量小于等于2法拉,充电电压小于12V。
在车模作品上,需要制作用于显示储能电容电压的LED显示板,尺寸不小于10厘米,显示LED个数大于16颗。车模上用于控制电路和LED显示电路的电源可以来自于单独供电电池。用于驱动舵机、电机的电源则需要来自于车模上2法拉储能电容。
3、赛道与比赛任务
比赛赛道使用室内往返赛道。在赛道上包括有3 ~ 5个充电线圈。比赛开始后充电线圈始终发送电能,发送电能最大功率50W。
车模从车库驶出,在赛道上往返两周后返回车库。
比赛计时是从车模驶出车库到返回车库之间的时间间隔。
六、平衡信标组
1、车模
采用平衡车模,D/E型两种车模。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
微控制器采用 MindMotion单片机。
传感器可以采用摄像头,CCD,光电管等。
3、赛道与比赛任务
比赛环境是信标场地。
车模从发车区触发,检测点亮的信标并逐一通过熄灭信标灯。
计时标准:从第一个信标点亮到最后一个信标熄灭之间的时间间隔。
七、智能视觉组
1、车模
车模使用H/M车模。
车模作品制作完毕后,对于车模外形尺寸没有限制。
2、微控制器与传感器
微控制器使用NXP公司的单片机与视觉模块。
传感器可以包括有摄像头,CCD,光电管等。
3、赛道与比赛任务
比赛场地采用与信标相同的场地。场地内存在Apriltag标识物,位置已知;场地内随机放置5 ~ 20 个图片内容,位置已知;车模从出发点出发后,依次找到图片位置并识别内容。根据识别大类,将图片(带有磁性)搬运到赛道指定位置。
关于智能视觉组详细要求,将会通过《 第十七届全国大学生智能车竞赛智能视觉组比赛细则 》进行公布。
八、极速越野组
1、车模
采用L型车模。 参赛队伍可以确定是否更改车模电机,将其修改成无刷电机。无刷电机驱动需要采用基于MindMotion的MCU的驱动方案。
2、微控制器与传感器
微控制器采用MindMotion单片机。
传感器可以使用GPS, 摄像头,惯性导航,光电管、超声波等。不允许使用OpenMV。
在比赛前,赛道GPS定位信息是由参赛队伍自行采集存储,以备比赛中控制使用。
3、赛道与比赛任务
沿着操场赛道,或者封闭环形街道运行一周。
计时标准:车模从起点到终点运行时间间隔;
预赛采用单独排位赛;决赛采用同时出发对抗比赛;
九、完全模型组
1、车模
车模采用I型车模。要求自行设计制作车模外壳。
车模制作完之后,对于车模尺寸没有限制。
2、微控制器与传感器
车模运动控制单片机使用Infineon单片机。
视觉模型部署在百度的EdgeBoard。其它传感器没有限制。
3、赛道与比赛任务
比赛赛道是在室内循环赛道的基础上,赛道上没有电磁引导线。在赛道旁边增加了若干元素。比赛任务和详细规则将会通过《第十七届全国大学生智能车竞赛完全模型组比赛细则》进行说明。
§05 比赛组织
一、比赛阶段
竞赛分为分赛区(省赛区)和全国总决赛两个阶段。其中,全国总决赛阶段在全国竞赛组委会秘书处指导下,与决赛承办学校共同成立竞赛执行委员会,下辖技术组、裁判组和仲裁委员会,统一处理竞赛过程中遇到的各类问题。
全国和分赛区(省赛区)竞赛组织委员会工作人员,包括技术评判组、现场裁判组和仲裁组成员均不得在现场比赛期间参与任何针对个别参赛队的指导或辅导工作,不得泄露任何有失公允竞赛的信息。在现场比赛的时候,组委会可以聘请参赛队伍带队教师作为车模检查监督人员。
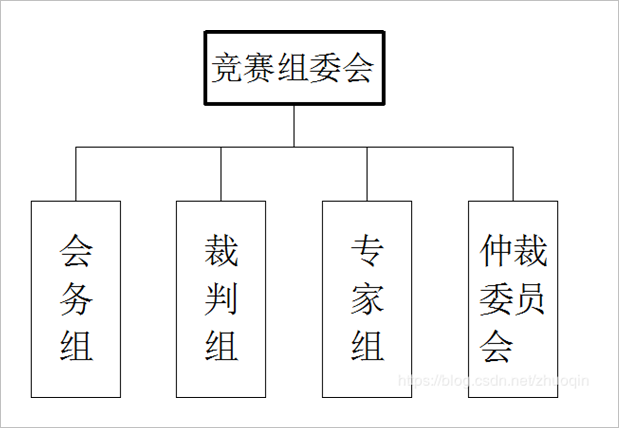
▲ 图5.1.1 比赛职能机构
二、比赛流程
针对明年暑期举行各分赛区、全国总决赛比赛过程中存在的一定不确定性因素,比赛流程在继承以往比赛流程安排以及2022年暑期比赛简化流程的基础上,将会尽量简化比赛流程安排,或者结合线上线下相结合的模式。具体比赛日程安排将会在2022年6月中旬公布。
分(省)赛区和总决赛的比赛规则相同。九个赛题组所遵循的比赛规则基本相同,但分别进行成绩排名。
除了完成正常比赛之外,组委会还会在比赛期间增加相关的技术交流、组织参观等活动。
三、比赛奖项
比赛将按照"分赛区普及、全国赛提高"的原则,在分赛区、省赛区每个组别分别按照相同的比例设置奖项。每个组别按照相同的队伍选拔各分赛区队伍参加全国总决赛。
1、分赛区奖项
- 一等奖:分赛区参赛队伍前20%队伍。
- 二等奖:分赛区参赛队伍35%。
- 三等奖:正常完成比赛但未获得一、二等奖的队伍。
- 优秀奖:未正常完成比赛,但通过补赛完成比赛的队伍。
在正常竞速比赛奖项之外,竞赛还将设置RT-Thread专项创新奖项,由于鼓励参赛同学使用RT-Thread工具完成车模作品的制作。
各分赛区可以根据比赛需要,修改和设置不同的奖项,并报大赛组委会审批。
2、全国总决赛奖项
第十七届全国总决赛奖项设置将在6月中旬另行发布。
四、报名与组队
1、组队要求
2022年暑期之前在校具有正式学籍的全日制本科、专科学生均可以参加比赛。每支参赛队由本校3名学生(多车编队、完全模型组别可以有5名学生)组成,本校带队老师1-2名。每名学生只能参加一个组别竞速比赛。
2、报名办法
参赛队通过竞赛网站报名,详细报名流程参见 《 第十七届全国大学智能汽车竞赛参赛队伍网络报名流程说明 》。参赛队伍可以按照大赛网站上公布的信息联系购买车模套件、单片机开发工具以及辅助教材。
智能车竞赛网站:https://smartcar.cdstm.cn/index。

五、比赛培训
竞赛组委会将会在明年暑期比赛之前在竞赛网站发布相关技术培训、技术交流等通知。
§06 其 它
1、比赛过程中有其他作弊行为的,取消比赛成绩;
2、参加分赛区、省赛区晋级全国总决赛的队伍人员每支队伍至多允许更改一名队伍;指导教师不允许改变;
3、根据明年暑期新冠疫情防疫要求,竞赛组委会将会调整现场比赛的形式,或采用线上比赛方式完成比赛。
4、本规则解释权归比赛组织委员会和竞赛秘书处所有。
§07 附 件
附录1、车模信息
1. 车模供应商:北京科宇通博科技有限公司
(1)B型车模
- 电机540,舵机:S-D5
▲ 图7.1.1 B型车模
(2)E,G型车模
- 电机:RS-380

▲ 图7.1.2 E 型车模
(3)G车模
▲ 图7.1.3 G型车模
(4)H型车模
- 电机RS-380

▲ 图7.1.4 H型车模
(5)K型车模
- 电单车模型

▲ 图7.1.5 K型车模
(6)L型车模
- 越野车模型

▲ 图7.1.6 L 型车模
2. 车模供应商:东莞市博思电子数码科技有限公司
(1)C型车模
- 电机RS-380,舵机:FUTABA3010
▲ 图7.1.7 C型车模
(2)D型车模
- 电机 RS-380
▲ 图7.1.8 D 型车模
(3)F型车模
- 电机RS-380
▲ 图7.1.9 F型车模
注:D,E两轮车模不允许增加第三轮改装成三轮车参加双车组的比赛。
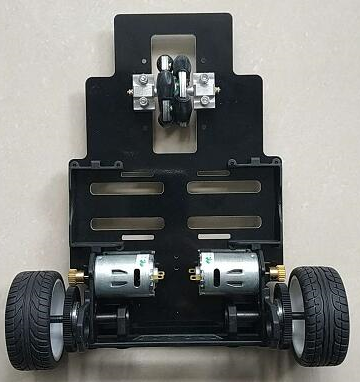
(4)M车模
M车模主要参数 :
- 尺寸: L×W×H=28.2×21×6.3cm
- 车轮: 直径6.3cm,车轮宽度3.25cm
- 电机: 型号:RC-380,电压:DC9.0V
▲ 图7.1.10 M车模底盘
3. 车模供应商:百度公司
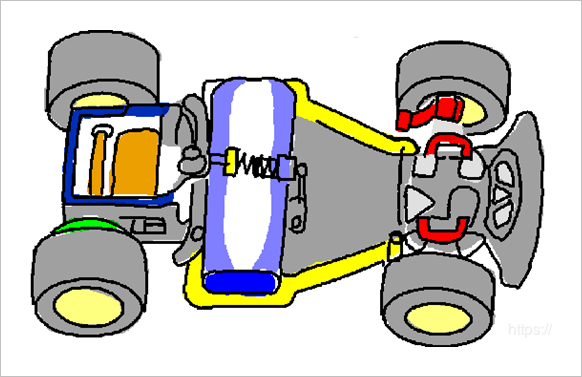
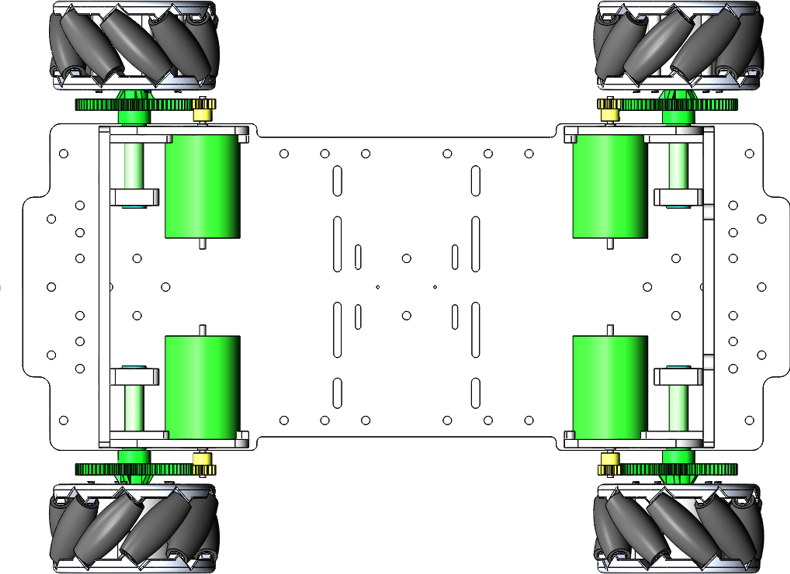
(1)I 车模
I 车模用于完全模型组的比赛,具体规格将会另文发布。
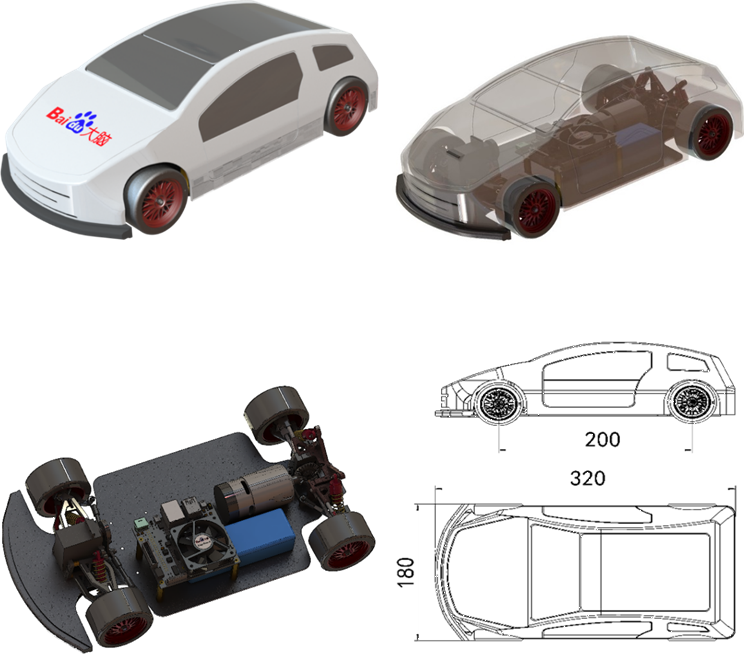
▲ 图A7.1.10 I 车模示意图
| 序号 | 项目 | 参数 | 说明 |
|---|---|---|---|
| 1 | 转向方式 | 舵机控制阿克曼转向 | 最小转弯半径约25cm |
| 2 | 动力布局 | 单电机后置后驱 | 齿轮差速器 |
| 3 | 电机 | 直流高精度编码器电机, 12V 12000rpm 500线 | 闭环控制稳定控速 最大速度10米 每秒 |
| 4 | 舵机 | DC4.8-6.8V 0.13Sec 60° | |
| 5 | 电池 | 3S锂电池 标称11.1V 2200mAh | 续航时间约30分钟 |
| 6 | 尺寸 | 长320mm宽180mm 轴距200mm | - |
| 7 | 悬挂 | 四轮独立悬挂 | - |
| 8 | 材质 | 碳纤维底盘 | - |
附录2:车模修改要求
• 禁止不同型号车模之间互换电机、舵机和轮胎;电单车控制舵机允许更换成S3010,SD5。
• 禁止改动车底盘结构、轮距、轮径及轮胎;如有必要可以对于车模中的零部件进行适当删减;
• 禁止采用其它型号的驱动电机,禁止改动驱动电机的传动比;
• 禁止改造车模运动传动结构;
• 禁止改动舵机模块本身,但对于舵机的安装方式,输出轴的连接件没有任何限制;
• 禁止改动驱动电机以及电池,车模前进动力必须来源于车模本身直流电机及电池;对于L型车模可以将原车模电机修改成无刷电机。
• 禁止增加车模地面支撑装置。在车模静止、动态运行过程中,只允许车模原有四个车轮对车模起到支撑作用。对于电磁平衡组组,车模直立行走,在比赛过程中,只允许原有车模两个后轮对车模起到支撑作用。
• 为了安装电路、传感器等,允许在底盘上打孔或安装辅助支架等。
• 参赛车模的车轮需要是原车模配置的车轮和轮胎,不允许更改使用其它种类的车轮和轮胎,不允许增加车轮防滑胶套。
• 如果车轮损坏,则需要购买原车模提供商出售的车轮轮胎。
• 允许对于车轮轮胎做适当打磨,但要求原车轮轮胎花纹痕迹依然能够分辨。不允许对于车轮胎进行雕刻花纹。
• 参赛队伍的轮胎表面不允许有粘性物质,检测标准如下:
车模在进入赛场之前,车模平放在地面A4打印纸上,端起车模后,A4打印纸不被粘连离开地面。检查过程如下图所示:

▲ 图7.2.1 车模轮胎粘性检查
附录3:赛车计时磁标
在比赛中新的计时系统采用的铺设的线圈感应磁标进行计时。为了便于车模安装,车模中可以采用以下几类钕铁硼永磁铁。
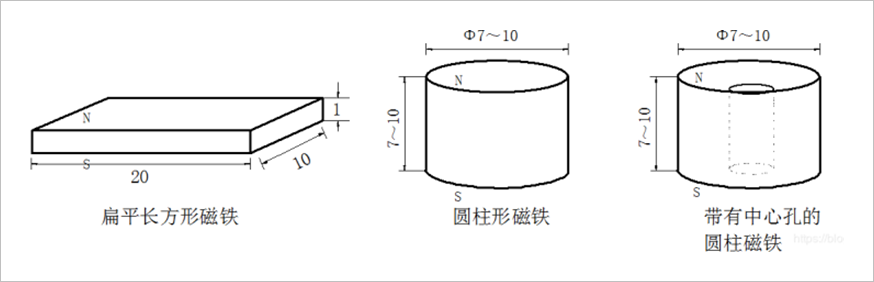
▲ 图7.3.1 用作计时磁标的永磁铁
第一类扁平的长方磁铁便于直接使用胶水粘贴在车模底板,既牢靠,又距离地面近,便于触发计时系统。推荐采用这类磁标。
第二类和第三类都属于圆柱形的永磁铁,只是第三类中带有中间孔,方便利用螺丝固定在赛车底盘上。为了可靠触发计时系统,这两类的磁铁的大小(高、直径)应该在7至10毫米。太小不利于触发计时系统,太高则不易于安装。
为了可靠触发计时系统,要求以上三种磁标安装后距离赛道表面应小于2厘米。一种比较简便的固定方式就是将上述永磁铁吸附在车模电机的下面。
■ 相关文献链接:
- 竞赛网站
- 智能车竞赛相关的教高司公函:公函[2005]201号文、教高司[2005]13号
- 第十六届智能车竞赛竞速组别网络报名说明
- M型模型车
● 相关图表链接:
- 图1 全国大学生智能车竞赛网站
- 图1.1 教育部下发的全国大学生智能车竞赛通知
- 表1-1 竞速比赛组别一览表
- 图2.3.1 车模上的伺服电机
- 图3.1.1 赛道基本尺寸
- 图3.1.2 赛道边界线引导
- 图3.1.3 赛道路肩
- 图3.1.4 外接信号源接口示意图
- 图3.1.5 信标引导比赛场地
- 图3.1.6 斑马起跑线
- 图3.1.7 永久磁铁标志
- 图3.1.8 赛道车库
- 图3.1.9 直线赛道示意图
- 图3.1.10 弯道赛道示意图
- 图3.1.11 十字路口示意图
- 图3.1.12 坡道示意图
- 图3.1.13 环岛示意图
- 图3.1.14 三岔路口示意图
- 图3.1.15 三叉路口示意图
- 图3.1.16 室内循环赛道示意图
- 图3.1.17 室内往返赛道示意图
- 图3.1.18 比赛时往返赛道示意图
- 图3.3.1 基于电磁感应的计时系统
- 图3.3.2 车模上安装的永磁计时磁标
- 图5.1.1 比赛职能机构
- 图7.1.1 B型车模
- 图7.1.2 E 型车模
- 图7.1.3 G型车模
- 图7.1.4 H型车模
- 图7.1.5 K型车模
- 图7.1.6 L 型车模
- 图7.1.7 C型车模
- 图7.1.8 D 型车模
- 图7.1.9 F型车模
- 图7.1.10 M车模底盘
- 图A7.1.10 I 车模示意图
- 表3-2 I车模基本参数
- 图7.2.1 车模轮胎粘性检查
- 图7.3.1 用作计时磁标的永磁铁