镜头的成像原理主要是因为小孔成像,作为机器视觉系统中的重要组件,镜头和工业相机同样重要,但是工业相机的成像原理是什么呢?我会在这一篇中诉说清楚。
01 CCD和CMOS
从感光芯片的角度来分,有CCD相机和CMOS相机,这两种分别是电荷耦合器件和互补金属氧化物半导体的缩写。
CCD
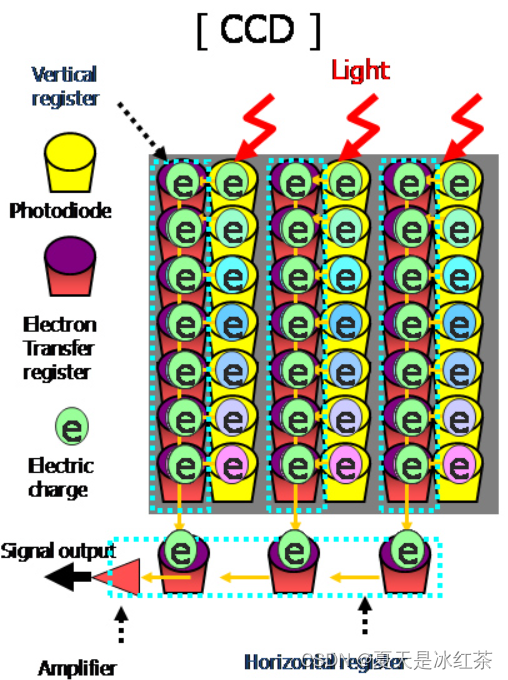
在感光像点接受光照之后,感光元件产生对应的电流,电流大小与光强有关,因此感光元件之间输出对的电信号是模拟的。在CCD工业相机传感器中,每一个感光元件都不对此作进一步的处理,而是将它直接输出到下一个寄存器,结合该元件生成的模拟信号输出给第三个寄存器,以次类推,知道结合后面一个寄存器后,才能形成统一的输出。CCD提供很好的图像质量、抗噪能力和相机设计时的灵活性。尽管由于增加了外部电路使得系统的尺寸变大,复杂性提高,但在电路设计时可更加灵活,可以尽可能的提升CCD相机的某些特别关注的性能。CCD更适合于对相机性能要求非常高而对成本控制不太严格的应用领域,如天文,高清晰度的医疗X光影像、和其他需要长时间曝光,对图像噪声要求严格的科学应用。
CMOS
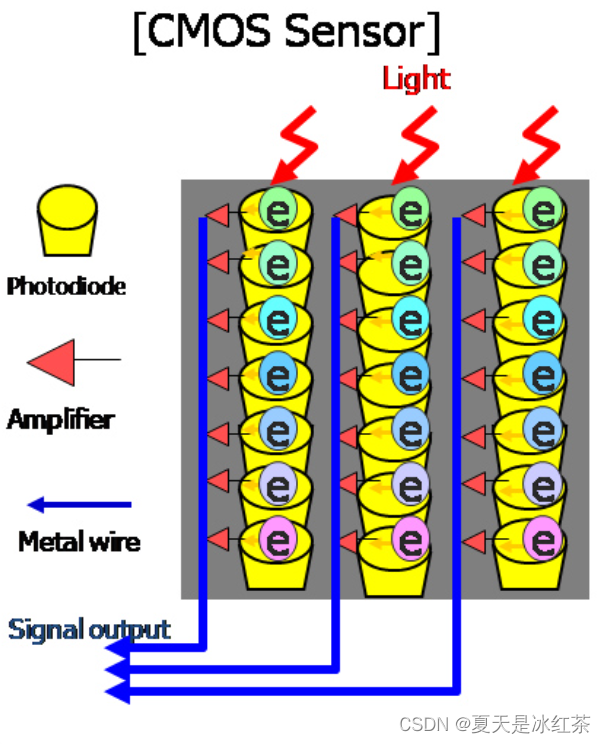
CMOS传感器中每一个感光元件都直接整合了放大器和模数转换逻辑,当感光二极管接受光照、产生模拟的电信号之后,电信号首先被该感光元件中的放大器放大,然后直接转换成对应的数字信号。换句话说,在CMOS传感器中,每一个感光元件都可产生的数字输出,所得数字信号合并之后被直接送交DSP芯片处理,问题恰恰是发生在这里,CMOS感光元件中的放大器属于模拟器件,无法保证每个像点的放大率都保持严格一致,致使放大后的图像数据无法代表拍摄物体的原貌—体现在后面的输出结果上,就是图像中出现大量的噪声,品质明显低于CCD传感器。但是,对于一般的精度要求,还是可以满足的。在集成电路领域中,CMOS采用的工艺是最基本的工艺,工艺相对来说不复杂,所以成本也不高,光电灵敏度较高等优点。它的一些性能参数也在不断被优化,应用也越来越广,总体来说,CMOS 的性价比还是较高的。
上面说了很多,其实可以这样简单认为:
- CCD传感器是一种电荷传输装置,通过逐行读取像素点的光信号,并将信号转化为电荷信号存储在暂存器中,最后再将电荷转换为数字信号输出。CCD传感器的优点是低噪声、高灵敏度、高动态范围,适用于对图像质量要求较高的场合。
- CMOS传感器采用的是并行读取像素点的光信号,并将信号转化为数字信号输出。CMOS传感器的优点是低功耗、成本低、集成度高,适用于对成本和功耗有限制的场合。
目前,CCD在性能方面仍然要优于CMOS。但随着CMOS图像传感器技术的不断进步,在其本身具备的集成性、低功耗、低成本的优势基础上,噪声与敏感度方面有了很大的提升,与CDD之间的距离在不断缩小。
02 黑白相机和彩色相机
区别很明显,有人可能认为这么简单还有必要讲吗?但简单的地方在于区分,而不在于原理。这里以CCD为例。
黑白相机成像原理
黑白相机最好理解了,当光线照射到感光芯片时,光子信号会转化为电子信号由于光子的数量与电子的数量成比例,主要统计出电子数目能够形成反应光线强弱的黑白图像。经过相机内部的微处理器处理,输出就是一幅数字图像。在黑白相机中,光的颜色信息是没有被保留。

彩色相机成像原理
为了获得彩色图像,通常使用三棱镜或滤光片的方法采集颜色信息。
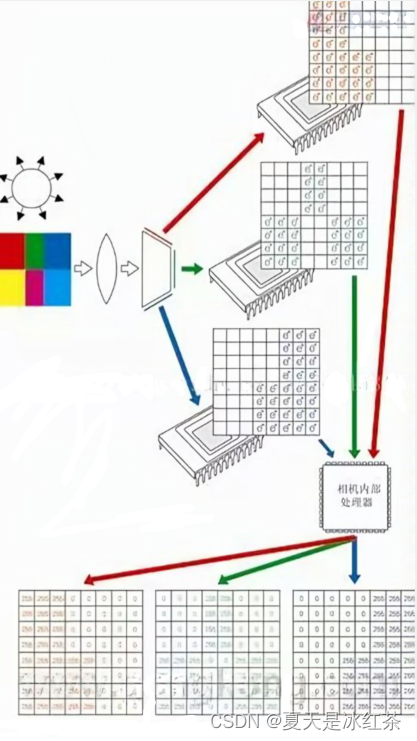
三棱镜模式:采用三棱镜将射入的光分成三束,每束光都由不同的内置光栅来过滤出某一种三原色,然后使用三块CCD分别感光。然后再将这三张图像合成一张高分辨率、色彩精确的图像。由于该方法需要三块感光芯片,造价比较昂贵。
如果考虑到价格,Bayer提出了一种廉价的折中方案:只用一块图像传感器,就解决了颜色的识别。他的做法是在图像传感器前面,设置一个滤光片,上面布满了滤光点,与下层的像素一一对应。如下图,Bayer滤光片上的滤光点的排列是有规律的:每个绿点的四周,分布着2个红点、2个蓝点、4个绿点。由于人眼对绿色最为敏感,所以绿色是红、蓝的两倍。由于每个滤光点只能通过红、绿、蓝之中的一种颜色,但是在输出时,所有像素都应该有这三种颜色的信息,被滤除的两种颜色分量值在后期的算法处理中通过插值法来补回。

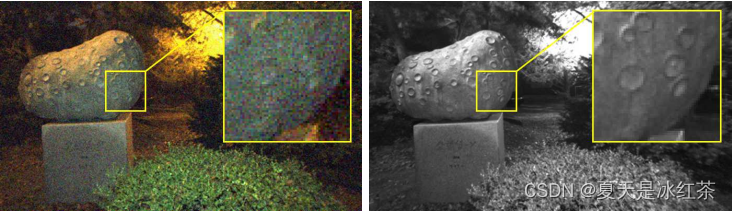
Bayer滤光片的方法显著优点在于它能节省成本,当前绝大多数彩色相机都采用此项技术。不过,黑白相机采集的是所有波长的光子,而Bayer彩色相机仅接受RGB三个波段的光子,并且会做一个去马赛克的邻域平均操作,因此无论是光通量还是细节表现均弱于灰度相机,
这里也可以看见再相同的环境下,如果颜色并不作为检验需求,工业相机一般选择黑白相机,同样的分辨率下,在上面的黑白相机所拍摄的图片中所包含的信息更精确。
03 面阵相机与线阵相机
工业相机根据像元的排列方式可分为线阵相机和面阵相机,线阵、面阵相机都有各自的优点和缺点,适用于不同应用环境。

面阵相机
上面我们所说的相机均属于面阵相机,以面为单位进行图像采集,可以直接获得完整的二维图像信息。相机像素是指这个相机总共有多少个感光晶片,通常用万个为单位表示,以矩阵排列,例如3百万像素、2百万像素、百万像素、40万像素。百万像素相机的像素矩阵为W*H=1000*1000。相机分辨率,指一个像素表示实际物体的大小,用um*um表示。数值越小,分辨率越高。
线阵相机
线阵相机是一类特殊的视觉机器。与面阵相机相比,它以“线”为单位,虽然也是二维图形,但长度较长,而宽度却只有几个像素。它的传感器只有一行感光元素,因此使高扫描频率和高分辨率成为可能。线阵相机的典型应用领域是检测连续的材料,如采集匀速直线运动金属、纤维等材料的图像。被检测的物体通常匀速运动 , 利用一台或多台相机对其逐行连续扫描 , 以达到对其整个表面均匀检测。可以对其图象一行一行进行处理 , 或者对由多行组成的面阵图象进行处理。另外线阵相机非常适合测量场合,这要归功于传感器的高分辨率 。
实际需求:
线阵相机的传感器只有一行感光元素,虽然面阵相机的像元总数较多,但分布到每一行的像素单元却少于线阵相机,因此面阵相机的分辨率和扫描频率一般低于线阵相机。面阵相机可以用于面积、形状、位置测量或表面质量检测等,直接获取二维图形能一定程度上减少图像处理算法的复杂度。在实际的工程应用当中,需要根据工程需求选择。
工业相机成像原理
总的来说,被检物品反射光线,经过工业镜头折射在感光传感器上(CCD或者CMOS)会产生模拟的电流信号,此信号经过模数转换器转换至数字信号,然后传递给图像处理器,得到图像,然后通过通信接口,传入计算机中,以方便后续图像处理分析。
参考文章
工业相机的成像原理是什么?-普密斯
Stereo Matching With Color and Monochrome Cameras in Low-Light Conditions (cv-foundation.org)
(7条消息) 机器视觉硬件选型——相机、镜头、光源_机器视觉系统硬件结构需要满足什么条件_量子孤岛的博客-CSDN博客
一文了解“工业相机”_图像 (sohu.com)
(6条消息) 工业相机原理详述_工业相机工作原理_智能算法的博客-CSDN博客
机器视觉系统硬件(1):工业相机 - 知乎 (zhihu.com)