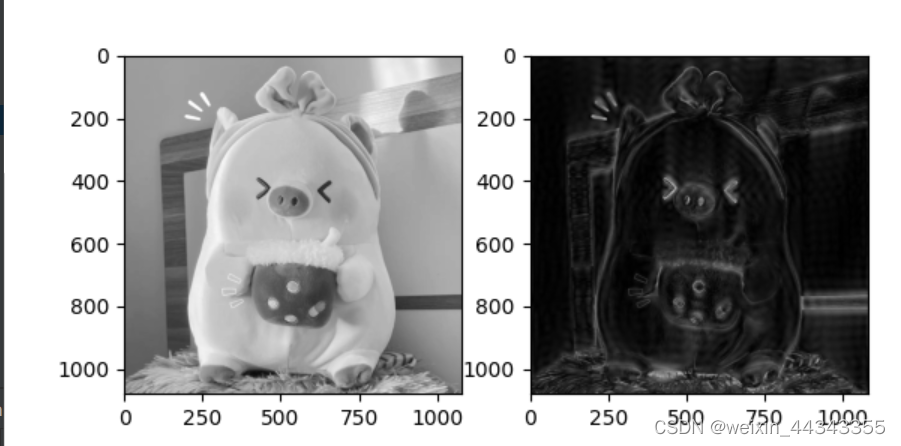
1、梯度运算
用OpenCV的形态变换( 膨胀、腐蚀、开运算和闭运算)函数morphologyEx
梯度运算即膨胀结果-腐蚀结果:
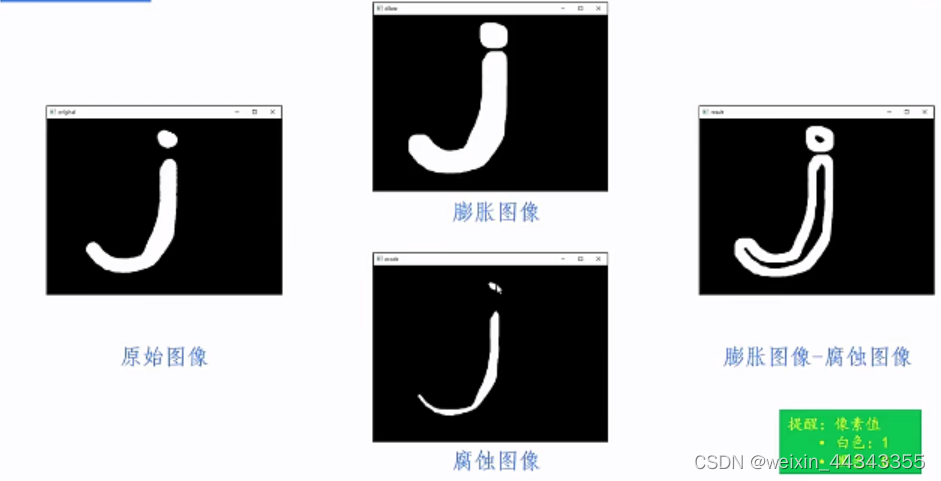
【注意】对于二值图像来说,必须是前景图像为白色,背景为黑色,否则需要进行反二值化处理
import cv2
import matplotlib.pyplot as plt
import numpy as np##读入图片
im1 = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_GRAYSCALE)
#创建一个5行5列的值全为1 的卷积核
k = np.ones((5,5),np.uint8)
##进行梯度运算
r = cv2.morphologyEx(im1, cv2.MORPH_GRADIENT, k)##图像展示
plt.subplot(1,2,1)
plt.imshow(im1, cmap="gray")
plt.axis("off")
plt.subplot(1,2,2)
plt.imshow(r, cmap= "gray")
plt.axis("off")
plt.show()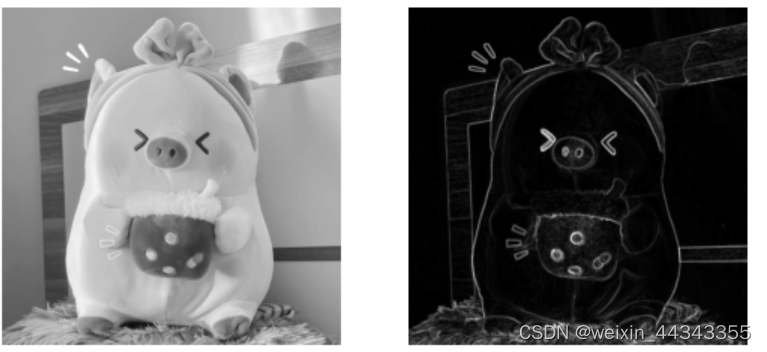
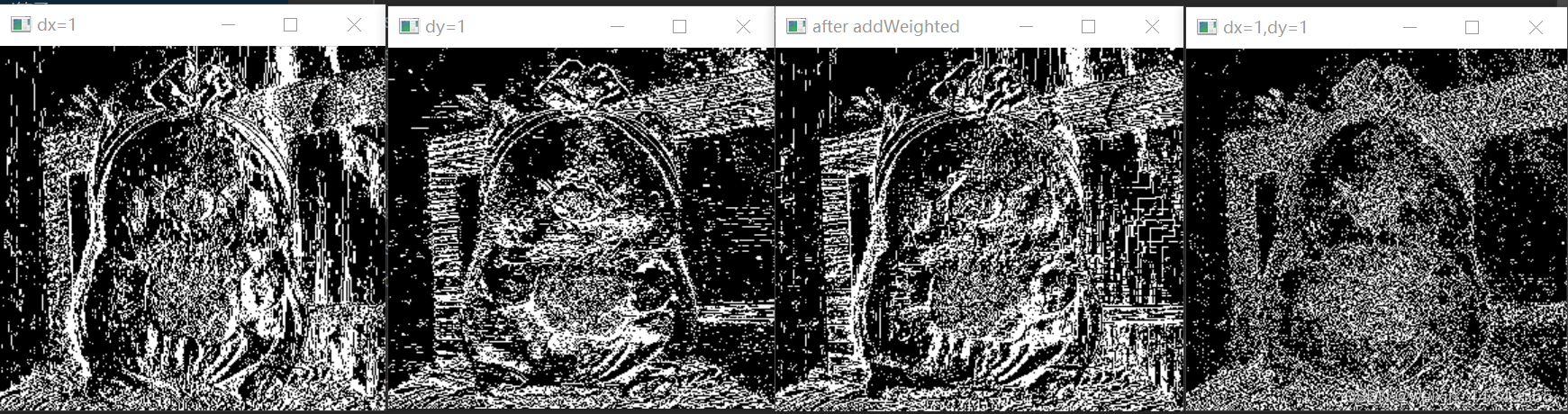
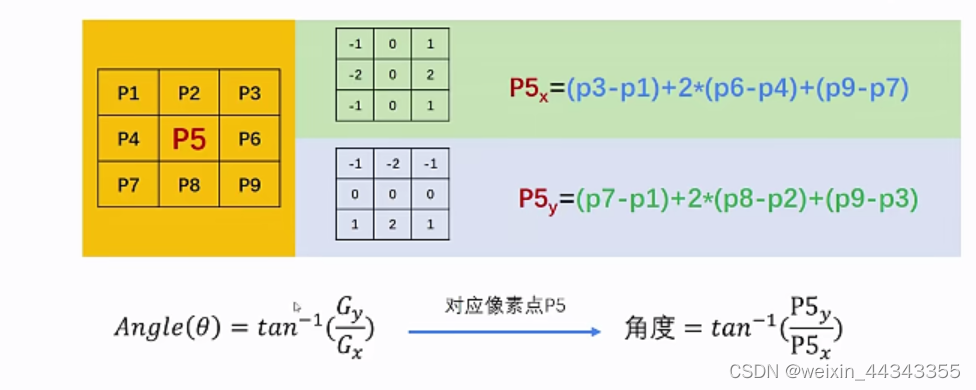
2、sobel算子
可以计算不同方向的梯度,梯度运算如下图所示:
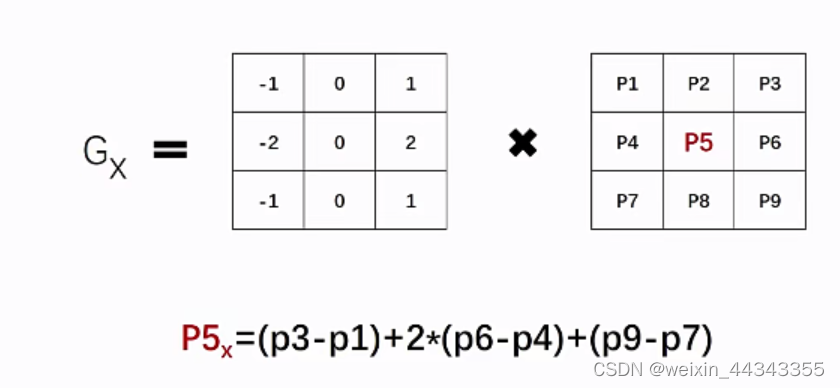
得出x方向的梯度值和y方向的梯度值后,通过G = sqr(GX2 + GY2)或G = |GX|+G|Y|得到整幅图像的梯度。
cv2.Sobel参数:

【注意】
1、如果梯度为负数,会无法显示,所以计算完梯度之后需要进行取绝对值处理。
2、同时计算x方向和y方向的梯度,通常没有分别计算两个方向梯度后,进行后处理效果好,通常用cv2.addWeighted(src1, alpha, src2, beta, gamma)进行修正。
3、卷积核大小只能为奇数。
import cv2
import numpy as npim1 = cv2.imread(r"fiction\xiaozhu1.jpg",cv2.IMREAD_GRAYSCALE)
##默认卷积核为3*3,如果写cv2.Sobel(im1, 0, 1, 0)的话,只能取到一侧边界,另一侧边界值为负,会被规整成0
sobelx = cv2.Sobel(im1, cv2.CV_64F, 1, 0,ksize=3)
sobely = cv2.Sobel(im1, cv2.CV_64F, 0, 1,ksize=3)
##取绝对值
cv2.convertScaleAbs(sobelx)sobelxy = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)
##同时取x、y的sobel算子没有单独计算x、y然后相加的效果好
sobel_tmp = cv2.Sobel(im1, cv2.CV_64F, 1, 1)
cv2.convertScaleAbs(sobel_tmp)cv2.namedWindow("dx=1", 0)
cv2.namedWindow("dy=1", 0)
cv2.namedWindow("after addWeighted", 0)
cv2.namedWindow("dx=1,dy=1", 0)
cv2.imshow("dx=1", sobelx)
cv2.imshow("dy=1", sobely)
cv2.imshow("after addWeighted", sobelxy)
cv2.imshow("dx=1,dy=1", sobel_tmp)
cv2.waitKey(0)
cv2.destroyAllWindows()
3、scharr算子
类似sobel算子,但是卷积核系数不同,离目标点越近的像素权重越大,边缘提取的效果比sobel算子好

二者效果对比如下:
import cv2im1 = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_GRAYSCALE)
##Scharr算子提取边缘,scharr相较于sobel算子,靠近核心部分的权值较大,边缘提取的效果更好,x与y不能同时为1
im1x = cv2.Scharr(im1, cv2.CV_64F, 1, 0)
im1y = cv2.Scharr(im1, cv2.CV_64F, 0, 1)
im1x = cv2.convertScaleAbs(im1x)
im1y = cv2.convertScaleAbs(im1y)
im1ScharryXY = cv2.addWeighted(im1x, 0.5, im1y, 0.5, 0)##拉普拉斯算子
imLap = cv2.Laplacian(im1,cv2.CV_64F)
imLap = cv2.convertScaleAbs(imLap)##对比sobel算子提取边缘的效果
im1SobelX = cv2.Sobel(im1, cv2.CV_64F, 1, 0)
im1SobelY = cv2.Sobel(im1, cv2.CV_64F, 0, 1)
im1SobelX = cv2.convertScaleAbs(im1SobelX)
im1SobelY = cv2.convertScaleAbs(im1SobelY)
im1SobelXY = cv2.addWeighted(im1SobelX, 0.5, im1SobelY, 0.5, 0)##sobel算子模拟scharr算子进行边缘提取
im1So_SC_X = cv2.Sobel(im1, cv2.CV_64F, 1, 0, -1)
im1So_SC_Y = cv2.Sobel(im1, cv2.CV_64F, 0, 1, -1)
im1So_SC_X = cv2.convertScaleAbs(im1So_SC_X)
im1So_SC_Y = cv2.convertScaleAbs(im1So_SC_Y)
im1So_SC_XY = cv2.addWeighted(im1So_SC_X, 0.5, im1So_SC_Y, 0.5, 0)cv2.namedWindow("im1ScharryXY", 0)
cv2.namedWindow("im1SobelXY", 0)
cv2.namedWindow("im1So_SC_XY", 0)
cv2.namedWindow("imLap", 0)
cv2.imshow("im1ScharryXY", im1ScharryXY)
cv2.imshow("im1SobelXY", im1SobelXY)
cv2.imshow("im1So_SC_XY", im1So_SC_XY)
cv2.imshow("imLap", imLap)
cv2.waitKey(0)
cv2.destroyAllWindows()
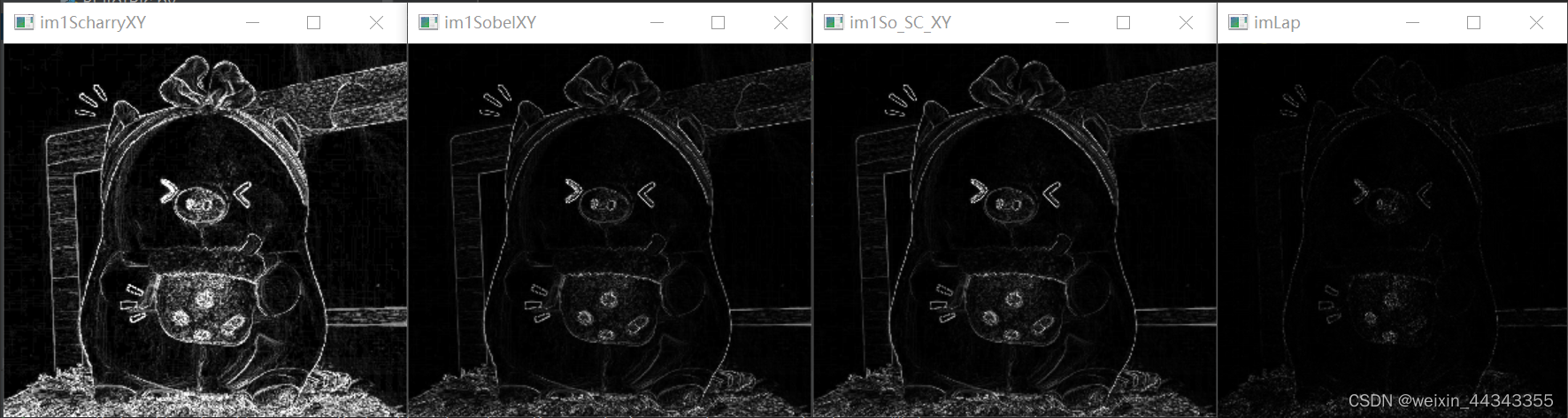 依次为scharry算子、sobel算子、sobel仿scharry、拉普拉斯算子结果
依次为scharry算子、sobel算子、sobel仿scharry、拉普拉斯算子结果
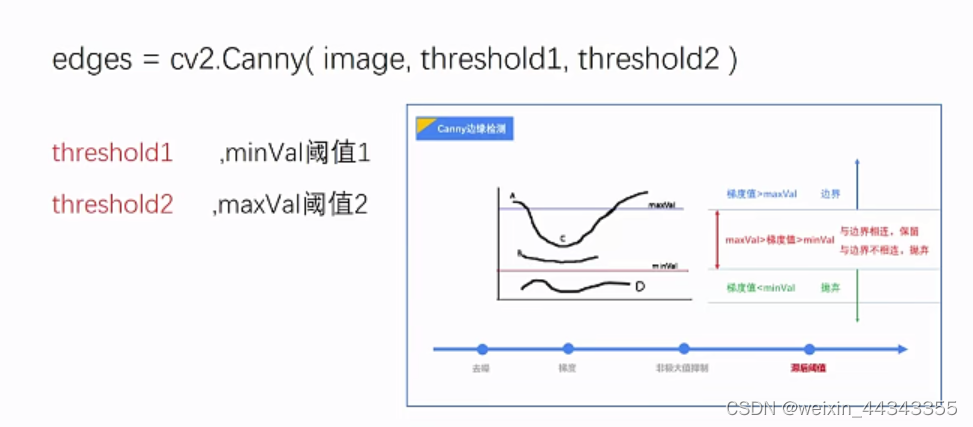
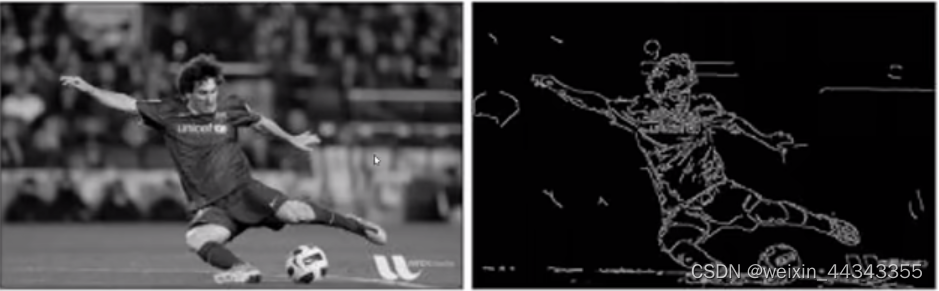
4、canny边缘检测
原理:
1、高斯滤波去噪声
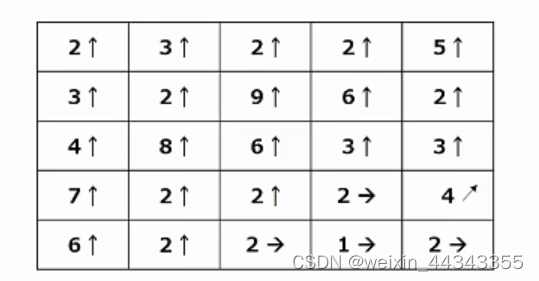
2、平滑后的图像用sobel算子计算梯度,梯度方向如下图所示:
梯度方向一般都与边界垂直,
一般归类为四个方向:垂直、水平,两个对角线
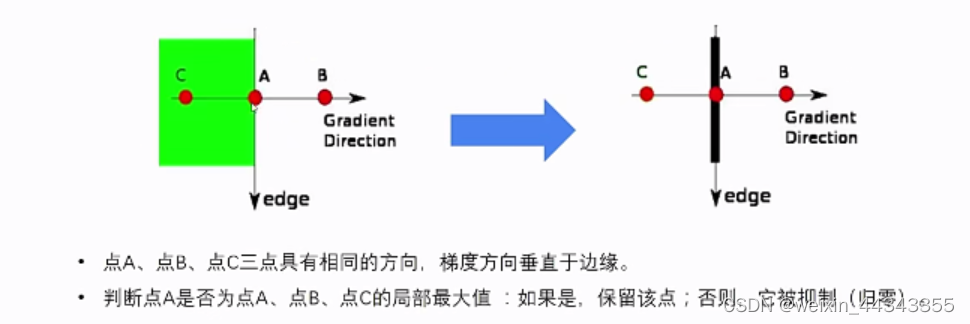
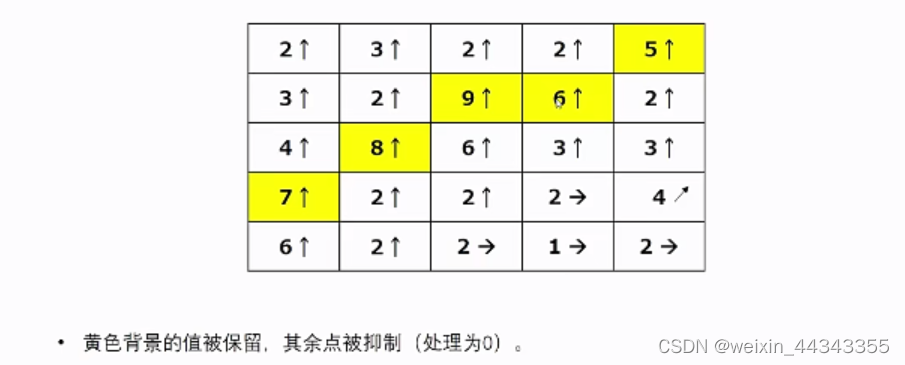
3、去除所有非边界点
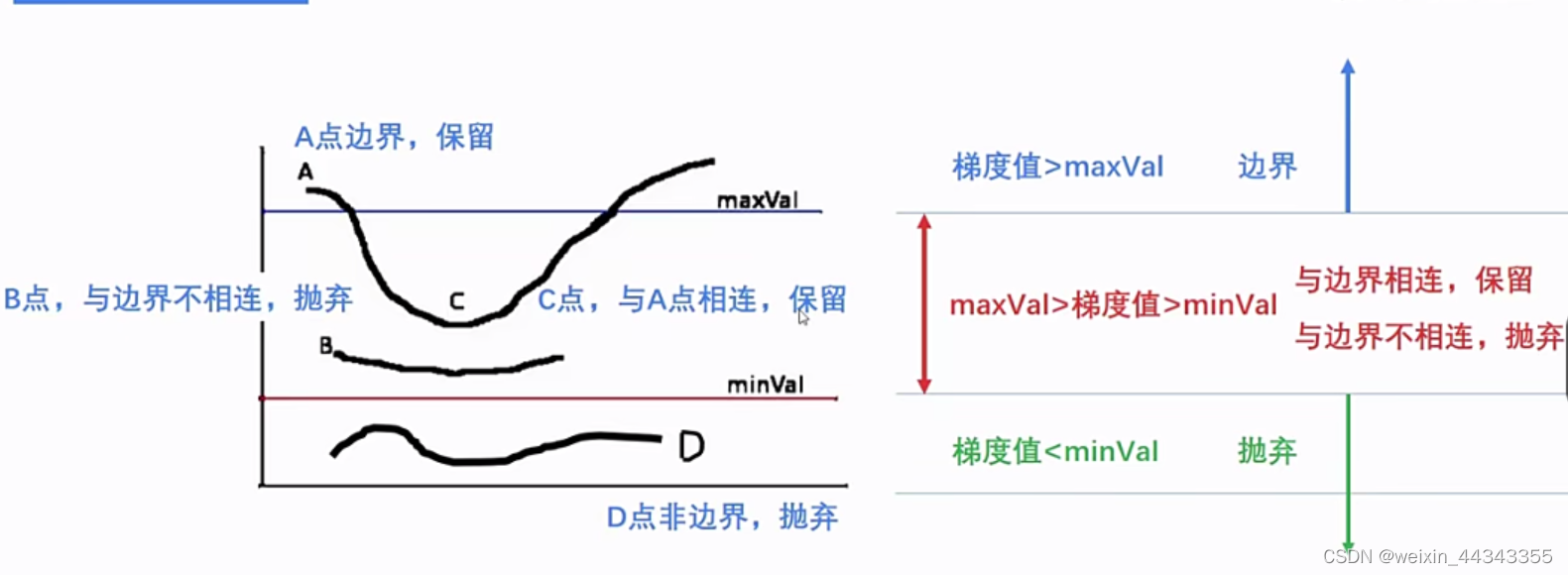
4、滞后阈值
选取两个阈值,maxVal和minVal
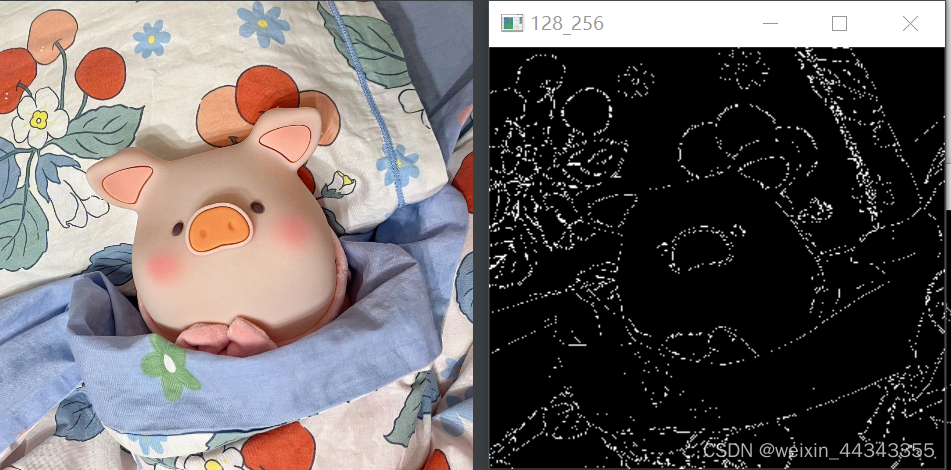
5、用法,其实就一个函数,cv2.Canny()
import cv2im1 = cv2.imread(r"fiction\pig2.jpg", cv2.IMREAD_UNCHANGED)
im1 = cv2.Canny(im1, 128, 256)
im2 = cv2.Canny(im1, 0, 256)
im3 = cv2.Canny(im1, 0, 128)
im4 = cv2.Canny(im1, 0, 10)cv2.namedWindow("128_256",0)
cv2.namedWindow("0_256",0)
cv2.namedWindow("0_128",0)
cv2.namedWindow("0_10",0)
cv2.imshow("128_256",im1)
cv2.imshow("0_256",im2)
cv2.imshow("0_128",im3)
cv2.imshow("0_10",im4)
cv2.waitKey(0)
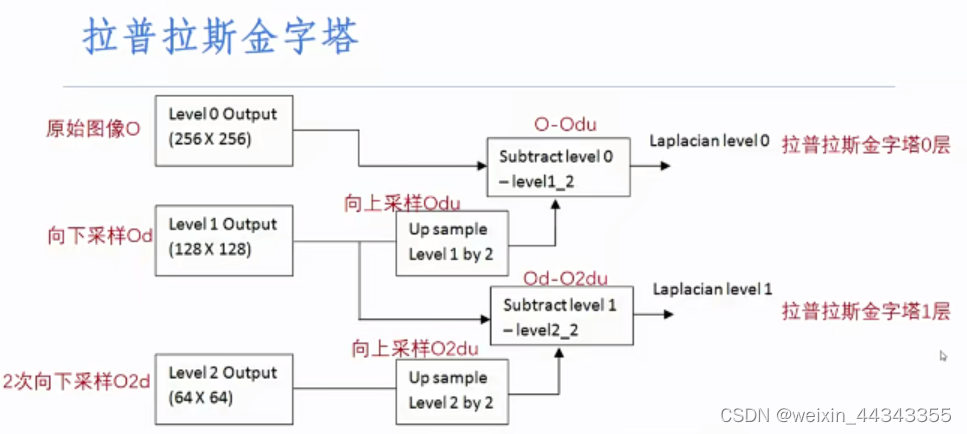
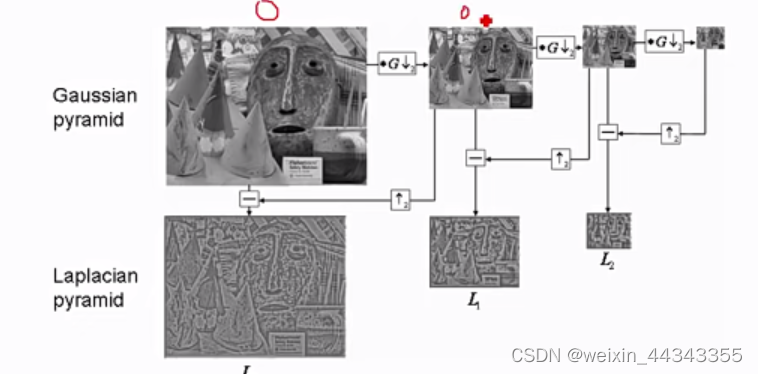
5、拉普拉斯金字塔
原图像减去(原图->向下采样->向上采样)
两次采样后图像会被平滑
import cv2im1 = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_GRAYSCALE)##向下取样,长、宽各变为1/2
im1Low = cv2.pyrDown(im1)##向上取样,长、宽各变为原来2倍,会变模糊
im1High = cv2.pyrUp(im1Low)##拉普拉斯金字塔结果
lapPyr = im1-im1Highcv2.namedWindow("im1Low",0)
cv2.namedWindow("im1High",0)
cv2.namedWindow("im1",0)
cv2.namedWindow("lapPyr",0)cv2.imshow("im1",im1)
cv2.imshow("im1Low",im1Low)
cv2.imshow("lapPyr",lapPyr)
cv2.imshow("im1High",im1High)cv2.waitKey(0)
cv2.destroyAllWindows()
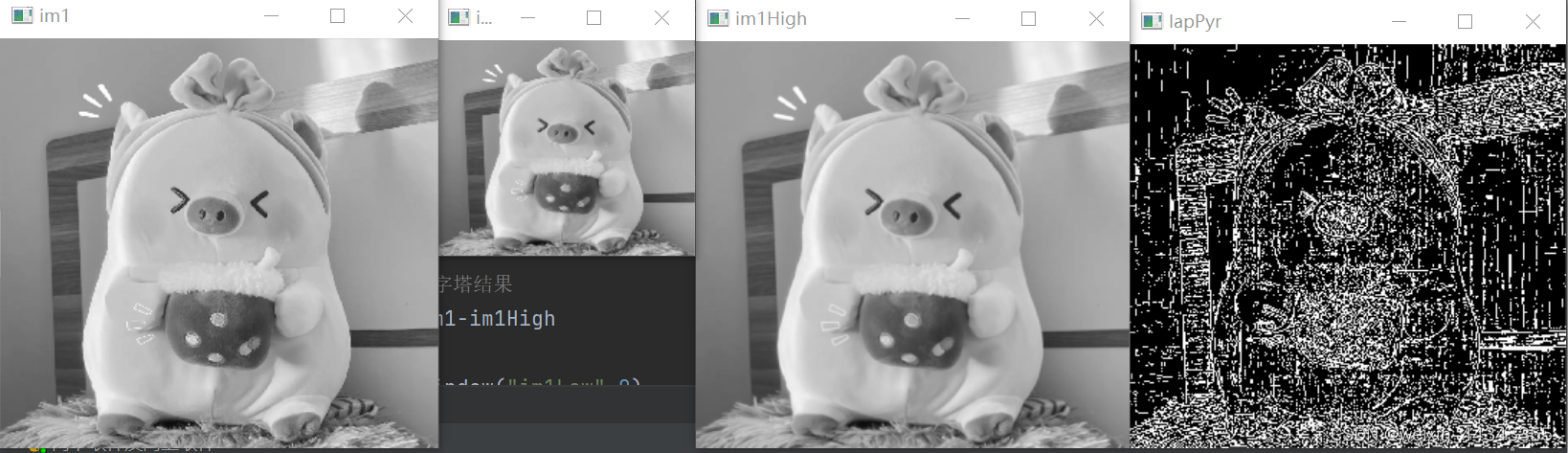 依次为原图、向下取样一次、向上取样、原图-向上取样结果
依次为原图、向下取样一次、向上取样、原图-向上取样结果
可多层构造拉普拉斯金字塔
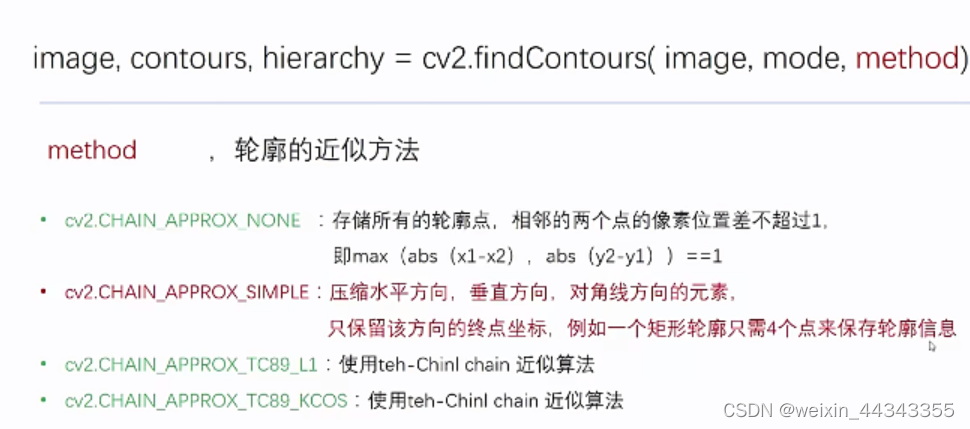
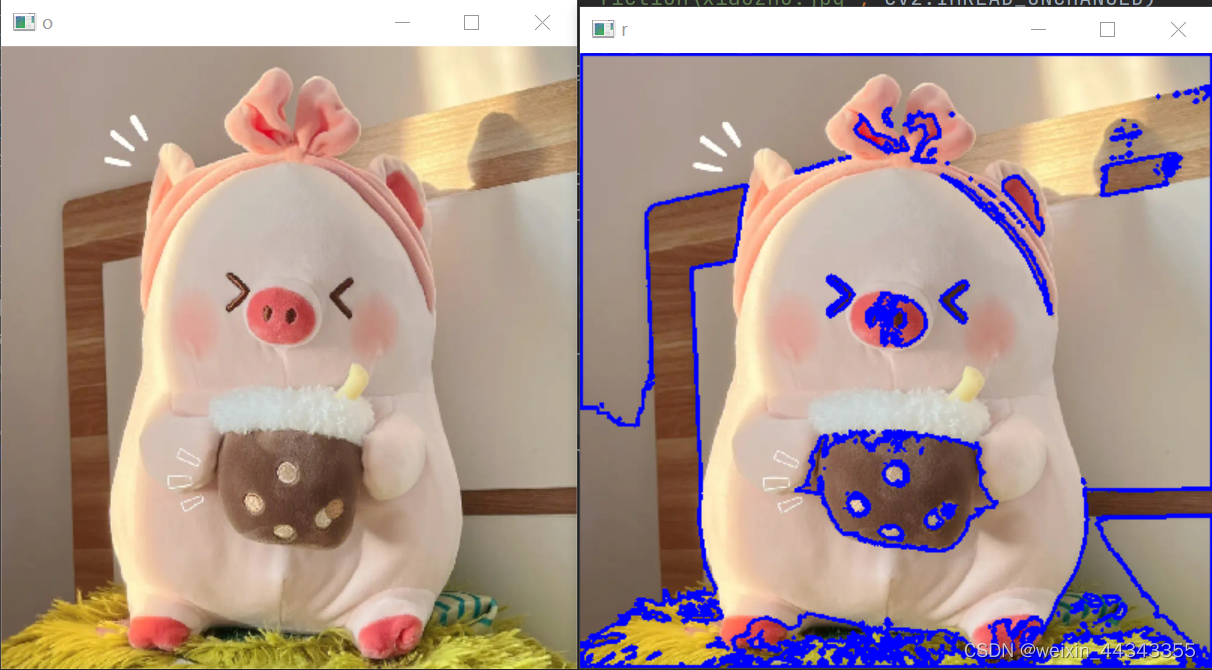
5、findContours
这是个轮廓检测的方法,注意,边缘和轮廓是不一样的,边缘不一定连续,但是轮廓是连续的。
import cv2o = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_GRAYSCALE)
co = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_UNCHANGED)
cco = co.copy()
max_threshold,img = cv2.threshold(o,127,255,cv2.THRESH_BINARY)
##findcounters:原始图像、轮廓检测方式(只检测外轮廓、等级树形式等)、轮廓近似方式
##查找、绘制过程中会改变原图像
counters, hieraichy = cv2.findContours(img, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
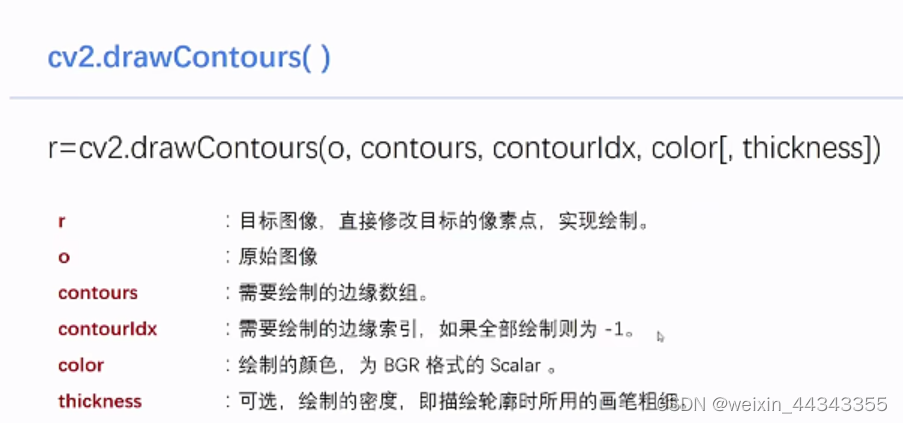
r = cv2.drawContours(co, counters, -1, (255,0,0),6)cv2.namedWindow("o", 0)
cv2.namedWindow("r", 0)
cv2.imshow("o", cco)
cv2.imshow("r", r)
cv2.waitKey(0)
cv2.destroyAllWindows()
6、高通滤波
利用傅里叶变换,将o转化为频域
低频为内部信息,高频为边缘信息
通过高通滤波器得到边缘信息
#低频为内部信息,高频为边缘信息import cv2
import matplotlib.pyplot as plt
import numpy as npo = cv2.imread(r"fiction\xiaozhu.jpg", cv2.IMREAD_GRAYSCALE)
##利用傅里叶变换,将o转化为频域,cv2.DFT_COMPLEX_OUTPUT返回双通道的结果,包含幅度和频率,第一个通道是实数部分,第二个通道为虚数部分
#dft = cv2.dft(np.float32(o), flags=cv2.DFT_COMPLEX_OUTPUT)dft = np.fft.fft2(o)#将频域0点移动到中心
dft1 = np.fft.fftshift(dft)# result = 20*np.log(cv2.magnitude(dft1[:,:,0], dft1[:,:,1]))
#
# plt.subplot(2,2,1)
# plt.imshow(o, cmap="gray")
#
# plt.subplot(2,2,2)
# plt.imshow(result,cmap="gray")
#
# plt.show()##通过高通滤波器得到边缘信息
rows,cols = o.shape
crow,ccols = int(rows/2),int(cols/2)dft1[crow-3:crow+30,ccols-30:ccols+30] = 0ishift = np.fft.ifftshift(dft1)iimg = np.fft.ifft2(ishift)iimg = np.abs(iimg)plt.subplot(1,2,1)
plt.imshow(o,cmap="gray")plt.subplot(1,2,2)
plt.imshow(iimg,cmap="gray")plt.show()