2022.8月,我很有幸代表学校去线下参加这一届的智能车大赛。因为疫情,我们一整个学期都在家上网课,原定在学校的备赛活动也因为这突如其来的疫情终止了。但我和另外一位同学小阳仍然开始了准备工作,我们一开始是打算做电磁车,我负责硬件,小阳负责软件,我通过各种途径查找相关资料,初步确定了前期任务,制作电磁车主控板,驱动板,电磁前瞻板,运放板,大概花了一个月左右的时间,我画好了PCB板,并且打板了出来。当时我还想着延迟上学应该不会太久,等着到学校再开始买元件,焊接测试,使用。
到3月初,也没等来开学,这时同校的一位同学小豪联系了我们,说时间有点紧迫,还不知道什么时候可以去学校,想一起把智能车先做起来,不然等开学再开始,可能来不及。(当时没想到这一整个学期都没开学,到暑假7月份,学校才让我们部分参加竞赛的同学去学校备赛)
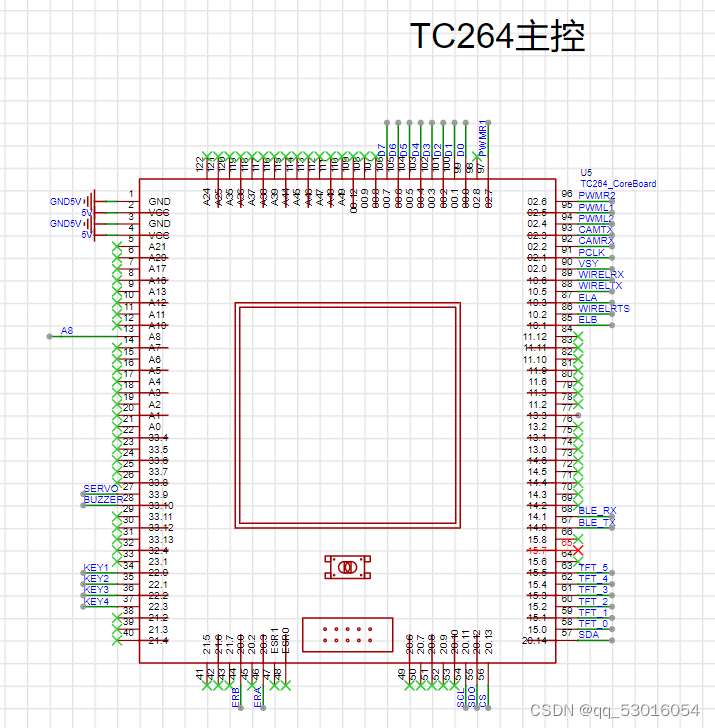
由于小豪之前时准备摄像头组的,我们经过简单的讨论决定改作摄像头车。我的工作还是硬件部分,制作小车的主控和驱动,下面来分享一下主控板的大体制作流程及经验。
我们当时参考了逐飞,博特等厂家的学习板,在此基础上做了适当的调整,以符合我们自己的需求。
主控板上的主要模块有电源输入模块,5V,3.3V,舵机等稳压模块,以及蓝牙,PWM信号,蜂鸣器,TFT屏幕,无线蓝牙串口,陀螺仪,电压检测等外设,外接模块。这其中最重要的就是几个稳压模块了,把这个做好,主控板基本上就没啥问题了。
1.电源输入模块
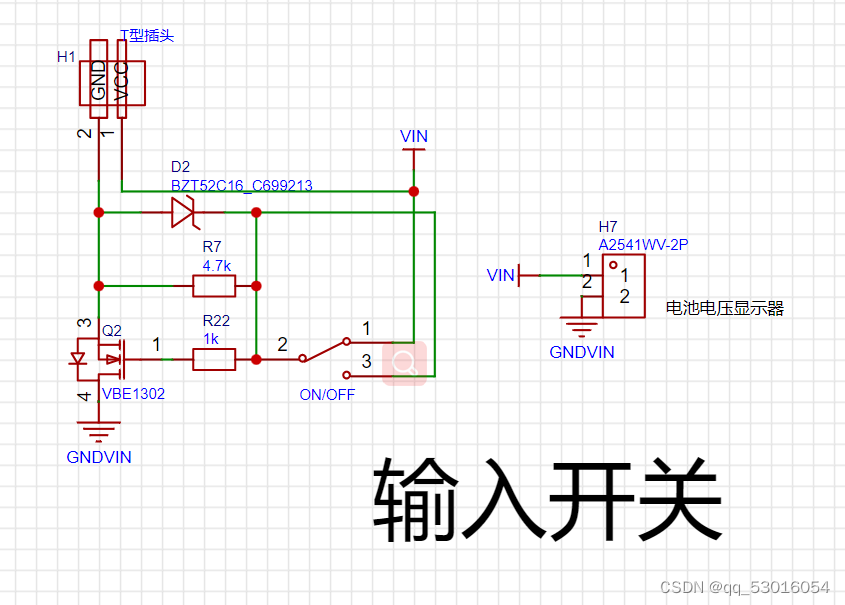
本来这一处我们的电源是直接输入的,后来参考了逐飞家的方案,来减少开关过程中的点火损耗,使之品质更加优越。其实我感觉不用也没有关系,直接并一个铝电解电容缓冲一下电压,使电压能够较为平稳的输入,便够了。
2.稳压模块
2.1 5V稳压模块
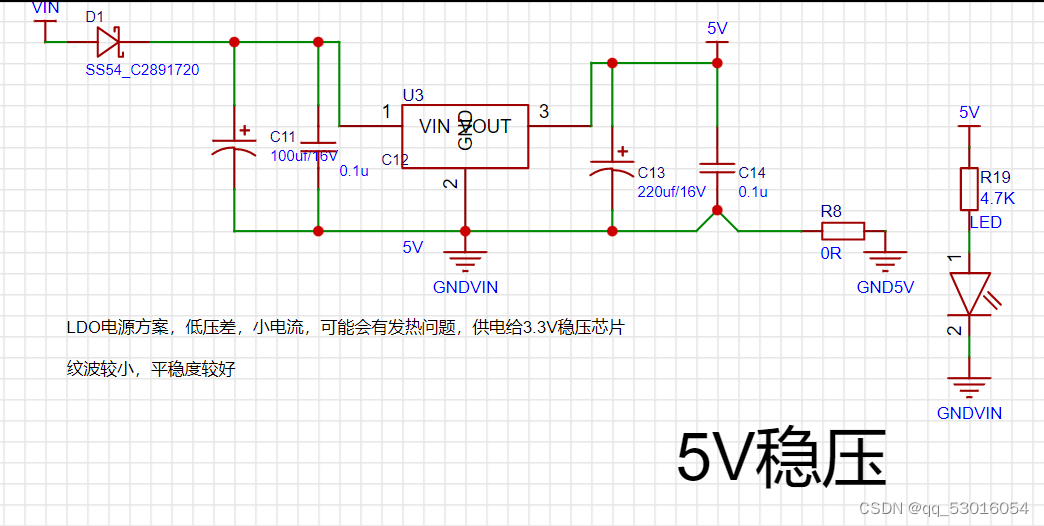
5V稳压主要供给核心板,3.3V稳压芯片,蓝牙无线串口等模块,这几个模块并无大功率器件,所以我采用了LDO电源方案的SPX2940芯片,其特点是低压差,小电流,纹波,平稳性较好。根据其芯片手册推荐方案,在其输入端,输出端各自并联一个铝电解电容,使较为波动的输入信号变得相对平稳,再并一个陶瓷电容来滤除较高频率的杂波。同时在输入端反接一个肖基特二极管来防止我们不小心把电源反接从而烧坏稳压芯片。
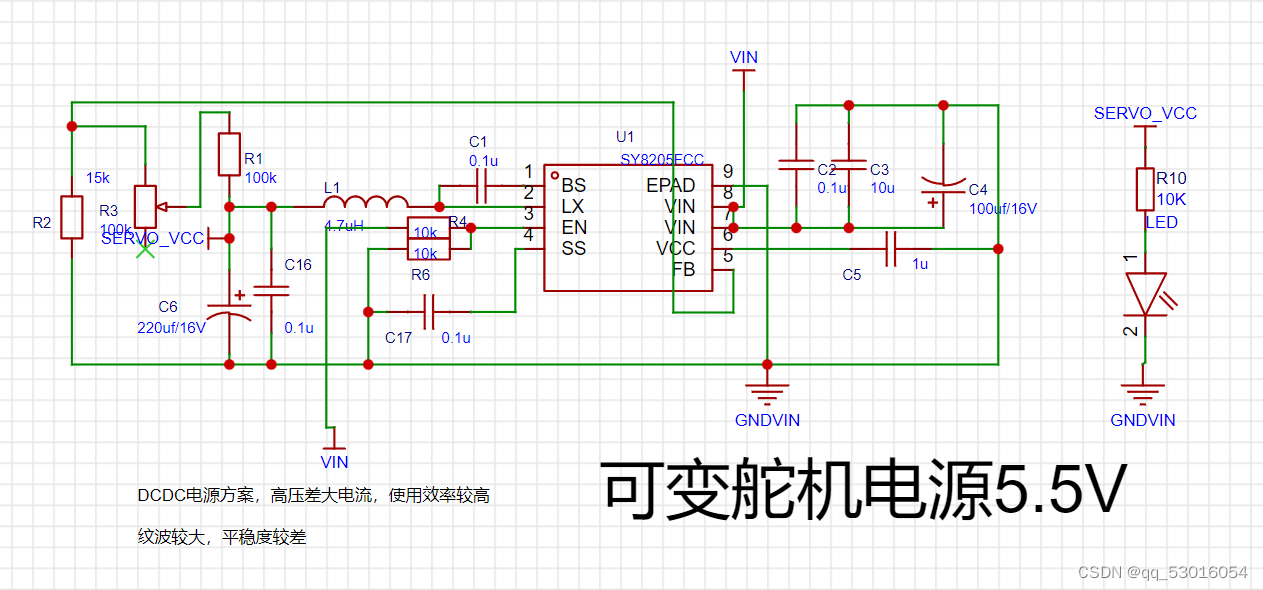
2.2 舵机稳压模块
舵机属于大功率器件,所以采用DCDC 电源方案,芯片为SY8205FCC,此方案的特点为,高压差,大电流,效率高,但纹波较大,平稳性较差。此处加入电位器,使输出电压可调,我们的舵机实际使用电压为5.5V。
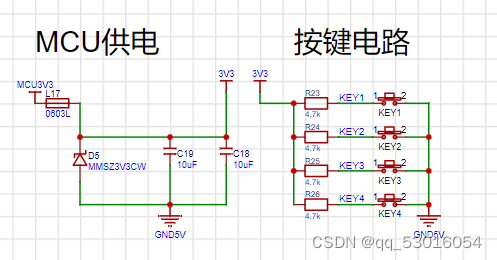
2.3 3.3V稳压模块
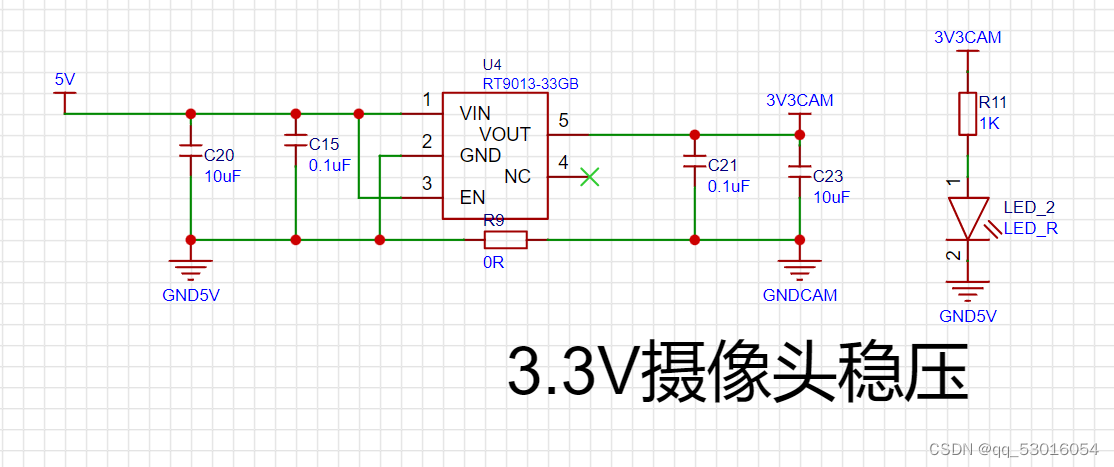
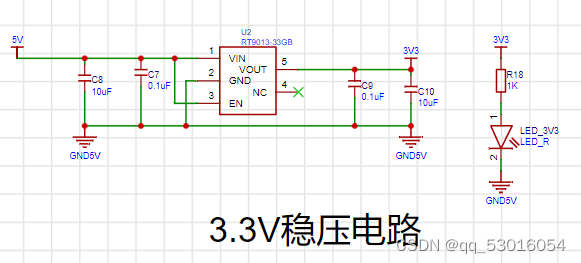
这两个模块电路一致,都是用的RT9013芯片,输入5V稳压,输出3.3V稳压,主要给摄像机模块,以及其他外设供电。电路也较为简单,各自在输入输出端并联钽电容,陶瓷电容来滤除低频,高频的杂波。
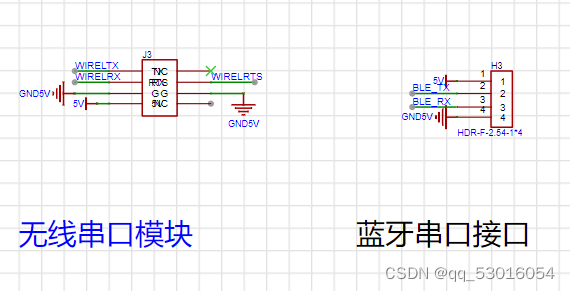
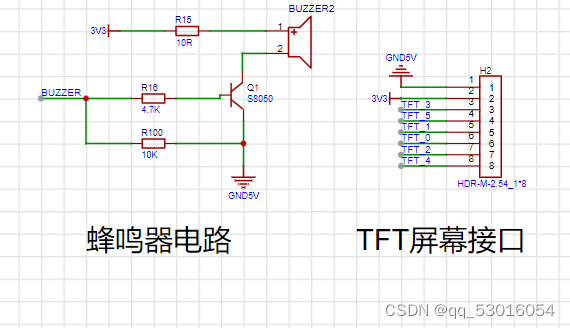
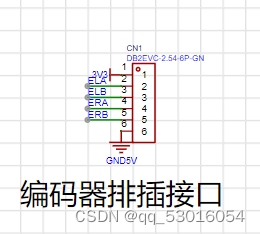
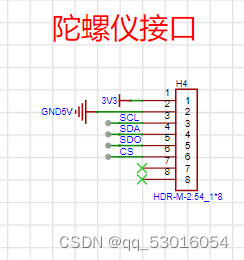
3. 外设模块
这一部分就根据每一个队伍自己的需求来确定就好了。
以上就是主控板的主要部分了,有不足的地方,麻烦大家指出,感谢。
如果大家有需要工程的,可以在评论区提,我私发给你。(最好点个赞,收个藏,~——~哈哈)在PCB部分完成之后,接下来便是购买元件,打板焊接验证,这个过程我都是在家里完成的,当时挺痛苦但也学到了很多。只记得我的房间书桌一团乱,到处都是元件,焊接工具,电路板。。。。。。在基本电源模块简单测试没有问题之后,我就寄给外省的队友,让他们上车测试。整个过程一言难尽,两块板子从画板到验证基本成功,各打了两次板,前后大概花了一个月左右,这一个月过的真的很充实,每天白天上网课,下午,晚上,焊接,改板子,测试板子,和队友交流进度。
我们驱动板的介绍,就放在下一期吧。
鉴于有很多同学要工程文件,我不便一个一个的发送,我把百度网盘链接放在这里,有需要的同学自取。
链接:https://pan.baidu.com/s/1dCHnDR82O9PdDEvoQkKnMw?pwd=jugf
提取码:jugf