在光圈恒定、被摄物体在取景框内大小恒定的前提下,焦距与景深成反比关系,即焦距越长,景深越浅,反之亦然。当焦距越长时,成像的前虚后实(即浅景深)效果会越明显,被摄物清晰但周围环境模糊;当焦距越短时,成像的前虚后实(即深景深)效果会越小,被摄物与周围环境清晰度接近。具体介绍如下:
1、在光圈恒定、被摄物体在取景框内大小恒定的前提下,焦距与景深成反比关系,即焦距越长,景深越浅,反之亦然。
2、当焦距越长时,成像的前虚后实(即浅景深)效果会越明显,被摄物清晰但周围环境模糊;当焦距越短时,成像的前虚后实(即深景深)效果会越小,被摄物与周围环境清晰度接近。
(一)摄像头属性
1、与色彩相关的基础概念
(1)白平衡:不论在任何光源下,让白色物体的色彩依旧为白色。
白平衡的三种调整方式:预置白平衡调整、手动白平衡调整、自动跟踪白平衡调整。
白平衡的目的:为了尽可能减少外来光线对目标颜色造成影响,在不同色温(暖光色温低偏红,冷光色温高偏蓝)下都能还原出目标原本的色彩,即白平衡就是解决画面出现偏色的问题。
白平衡所支持的场景:自动、室外、手动、区域白平衡、自然光和路灯。
(2)饱和度:色彩的鲜艳程度,饱和度越低画面越偏灰,饱和度趋于零时画面会变成黑白。
(3)对比度:是指图像中最暗区域的黑和最亮区域的白之间不同亮度层级的测量,反映物体亮度范围的明暗之比,对比度越大,图像越清晰,色彩越鲜明。
因此说饱和度影响色度,对比度影响亮度。对比度越高,暗区域会越暗,亮区域会越亮甚至过曝;对比度过小,图像会发蒙。
2、与亮度相关的基础概念
(1)增益:是图像传感器(sensor)对光线的敏感程度。增益增加使得sensor对光线更加敏感,能够捕获更多的光子,增加图像亮度。
(2)快门:是相机控制曝光时间的一个装置。
快门分为高速快门和慢门,慢门又称为长曝光,高速快门具有较强凝固瞬间的能力。
快门决定了图像的成像速度,故高速快门能够抓拍到运动的瞬间,长曝光可能会造成影像拖影。
长曝光的定义:快门的时间增加,拍摄静止物体影像不大,但是在拍高速运动物体时,快门时间过长会出现拖影现象,影像细节呈现。
(3)光圈:光圈即通光孔径用来控制进光量。f后的数字越小,光圈越大。
曝光是影像画面亮度的根本因素,曝光是图像传感器sensor进行感光的一个过程,在控制曝光即控制进入相机的光通量,即达到snesor芯片表面的光子总和。
3、与镜头相关的基础概念
(1)焦距:镜头到感光元件的距离。
(2)景深:镜头能够取得物体清晰图像前后的距离范围。
(3)光圈和景深、焦距与景深、焦距与场景视角大小的关系?
光圈越大,景深越浅;光圈越小,景深越深;(光圈与景深成反比)
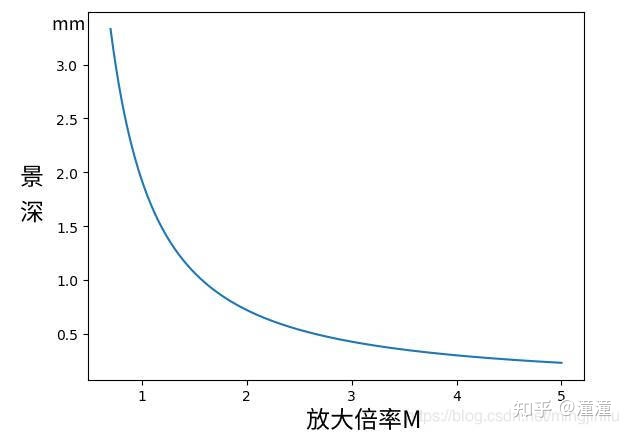
焦距越大,景深越浅;焦距越小,景深越深;(焦距与景深成反比)
焦距越大,场景视角越小;焦距越小,场景视角越大;(焦距与场景视角成反比)
4、背光补偿、强光抑制与真实宽动态、数字宽动态
(1)背光补偿又称为逆光补偿,背面有强光,导致主体曝光不足而变黑。背光补偿主要是对感兴趣区域或暗区域进行亮度提升,背光补偿可能会造成亮区域更亮甚至于过曝。比如背光下,关注点在室内的场景
(2)强光抑制:采用DSP技术,将强光部分弱化,把弱光部分强化,达到光线平衡。强光抑制会造成暗区域更暗,适用于暗处突然遇到强光的场景,比如为看清夜晚高速公路开远光灯的车的车牌。
(3)宽动态:可以降低亮处亮度,提升暗处亮度,要求暗处和亮处都可以看清楚物体。
(4)真实宽动态:通过同一时间曝光两次,长曝光和短曝光两次曝光的照片进行合成,所以这也是为什么与防闪烁的50Hz或60Hz功能互斥了,因为开启50Hz的防闪烁后,镜头的快门调节到只能拍摄小于等于50Hz的,所以大于50Hz的属于短曝光,短曝光就没法拍摄,所以只剩下长曝光,所以无法进行合成。
(5)数字宽动态:可以理解为使用算法将图像划分为几个区域,进行宽动态处理(数字宽动态是将画面分成若干区域,分别统计各自区域的曝光,然后将曝光数据按照不同的比例进行计算,从而得出整体的一个目标亮度值,来调节相机的曝光)
(6)如何从图像效果上区分真实宽动态和数字宽动态?
真实宽动态的效果更好,尤其体现在高亮处的细节(开启真实宽动态后,设备2A会重启,)
5、ICR与偏振镜
ICR日片:过滤红外光和紫外光
ICR夜片:不过滤红外光和紫外光
偏振镜:能够滤除偏振光的滤镜,使用偏振镜画面会变暗。
6、视频制式中NTSC和PAL的区别?
P制最大快门1/25,N制最大快门1/30;P制帧率25Kbps,N制帧率30Kbps;P制I帧间隔50,N值I帧间隔60;P制50Hz,N制60Hz。
默认的最大快门时间不同,最大帧率也不同,P制50Hz,N制60Hz,快门优先下默认的快门值不同,D1和CIF分辨率不同
7、问题整理
[1] 控制曝光的三种方式:增益、快门、光圈
[2] 增加哪些因素可能会引起噪声的增加?噪声主要来源于增益,增益越大噪声越明显,其次增加饱和度、锐度、对比度也可能会引起噪声的增加。
[3] AE控制逻辑:
亮度不够:先光圈,再快门,后增益
亮度过高:先增益,再快门,后光圈
[4]色彩抑制和锐度抑制一般在低照度下有效,只影响夜间效果
[5] 电子防抖开启,会使得图像变大,画面缩放90%,并且电子防抖与数字变倍互斥,
[6] 2D降噪:主要去除空域噪声,采用均值/中值滤波算法降噪,属于帧内降噪,值越高,画面越模糊。
3D降噪:主要去除时域噪声,通过对比帧间信息进行降噪,属于帧间降噪,值越高,运动物体拖影更明显
8、知识总结
-
结构:镜头→滤光片→sensor→AD→ISP→编码
镜头:把目标反射或者发出的光线汇聚到光敏面上
-
光圈:通光孔径。光圈越小,单位时间进光量越小,图像越暗
-
Sensor:图像传感器。由许多单独接收光线的小格子组成,可以把光信号转换为电信号
-
焦距:镜头到感光元件的距离
-
清晰度:影像上各细部影纹及其边界的清晰度
-
亮度:设备所拍摄画面的明亮程度,指的是整体的亮度
-
对比度:图像中明暗区域最亮的白和最暗的黑之间不同的亮度层级,反映景物亮度范围的明暗比。对比度越高,图像越清晰、艳丽,对比度越低,图像越黑暗
-
饱和度:色彩的鲜艳程度、纯度。不影响亮度
-
锐度:图像边缘对比度。锐度越高,图像细节对比度越高,易引入噪声
ICR:日片截止红外光、紫外光,防止偏色,夜片不截止红外光,通过镜头可以补光
ICR切换:自动:设置亮度阈值,环境亮度变高,偏振镜打开,相机亮度变小 -
普通:偏振镜关闭,适用于环境亮度较低
红外:偏振镜打开,适用于环境亮度较高 -
偏振镜:滤除偏振光,开启后画面可能变暗
-
昼夜模式:帮助设备适应低照度条件,体现更高的光灵敏度
-
基本顺序:光圈先调,亮度不够调曝光,再调增益;亮度过高调增益,再调曝光
-
3D降噪:比对帧间信息,多余信息去噪
空域:二维空间上,单帧图像像素点与其他像素平均
时域:对比相邻几帧图像,对每个像素进行加权处理 -
宽动态:提高暗部亮度,降低亮部亮度,均匀整体画面
同一时间曝光两次(快、慢),进行合成 -
动态范围:摄像机对拍摄场景中景物光照反射的适应能力,指亮度反差和色温反差的变化范围。
-
白平衡:不管任何光源下,都能将白色物体还原为白色
-
背光补偿:检测到背光物体,提升整体画面亮度,牺牲对比度
-
背光补偿指背面有强光,导致主体曝光不足而变黑
-
强光抑制采用DSP技术,弱化强光部分,亮化暗光部分
-
宽动态适用于环境光线较为理想,无法捕获目标细节,应用在明暗交替的地方;强光抑制的应用环境相对恶劣,可以抓拍细节
-
曝光:sensor进行感光的一个过程
-
增益:sensor对光线的敏感程度,易捕获到噪声
-
快门:控制曝光时间的装置
(二)编码模块
1、简述几种常见的编码模式以及区别
H.264/H.264B/H.264H:I帧和P帧共同编码,压缩率较高
M-JPEG:只有I帧,压缩效率极低,但是画质高
H.265:压缩率比H.264更高,相同画质下比H.264节约大概50%的码流
SVAC:中国公安
2、简述I帧,P帧、B帧以及虚拟I帧的区别
I帧:对全部图像信息进行编码
P帧:前向比较帧,仅包含与之前帧的差异
虚拟I帧:智能编码采用虚拟I帧,是某些P帧,通过指定一个P帧为长期参考帧,让P帧也可以实现随时接入。
B帧:利用前后的(I帧/P帧)进行双向预测,B帧的压缩效率最高(数据占比:I帧>P帧>B帧)
3、动态ROI:区分运动对象与背景区域,降低背景区域的画质以便于提高压缩效率
4、如何判断当前帧率是否设置成功?
可以在admin模式下输入bitrate查看,或者可以录一段视频,然后使用码流分析工具进行分析。
- 编码过程:设备→vi视频采集→vpp视频预处理→vend视频编码
- OSD叠加:在原始图像中添加文字说明或区域覆盖
- 动检:比较前后两幅图像变化程度
- H.264:极高压缩比,高质量的图像质量,良好网络传输性能,灵活配置视频编/解码器,多码流输出,本地存储、网络传输分别处理,较低宽带提供高质量图像传输低码率,高质量图像,网络适应性强,容错能力强
- H.265:压缩效率更高,错误恢复能力更强,降低实时时延,减少信道获取时间,随机接入时延,降低复杂度
- MJPEG:压缩效率低,根据每一帧图像内容进行压缩,只有i帧,没有p帧
- Svac:中星微电子,公安部第一研究所共同建立
- 智能编码:一种方法,不是标准。保证感兴趣区域画质,特殊处理非感兴趣区域编码,提高压缩性能
- **技术:码率控制算法,基于视频内容分析的编码, 噪声抑制
- 压缩原因:视频未经编码时具有极大数据量,不利于传输,存储,实时应用
- 原则:保证视觉效果的前提下尽可能减少视频数据量
- 动态ROI:区分运动对象区域和背景,适当降低背景区域编码质量
- 动态GOP:场景长时间静止,拉长视频编码GOP,较大变化时再插入i帧
- 参考帧:双帧参考,虚拟i帧,噪声抑制
- 固定码流:设置码流值10%左右浮动
- 可变码流:可设置画质(码流未超上限),超上限会降低画质
- 分辨率:单位英寸中所包含的像素点数
- 帧率:帧数/时间
- I帧:进行帧内预测,解码不需要其他信息,数据较多
- P帧:向前参考帧,参考前面一帧的数据加上本帧变化而得出数据
- 虚拟i帧:某些p帧通过指定参数为前一个IDR帧,不依赖前面的p帧随机接入
- P/N制不同:默认最大快门时间、默认最大帧率、快门优先和手动的默认快门时间,D1和CIF分辨率