SunnyG按:想用ROS2系统做智能小车,但是查了资料说ubuntu 18支持到Ros1 melodic,所以想试试将Jetson Tx1升级到ubuntu 20.04,但是不知是否会出现兼容问题,观察一下效果,这里记录一下步骤,方便查阅。
达成:完成升级,安装ROS2
===========================================================================
Step 1:准备
环境:Jetson Tx1,ubuntu 18.04
===========================================================================
Step 2:开工
连好网线,键鼠,显示屏,开机
首先打开终端,保证软件系统都是最新得
sudo apt update
sudo apt upgrade
sudo apt autoremove
sudo reboot
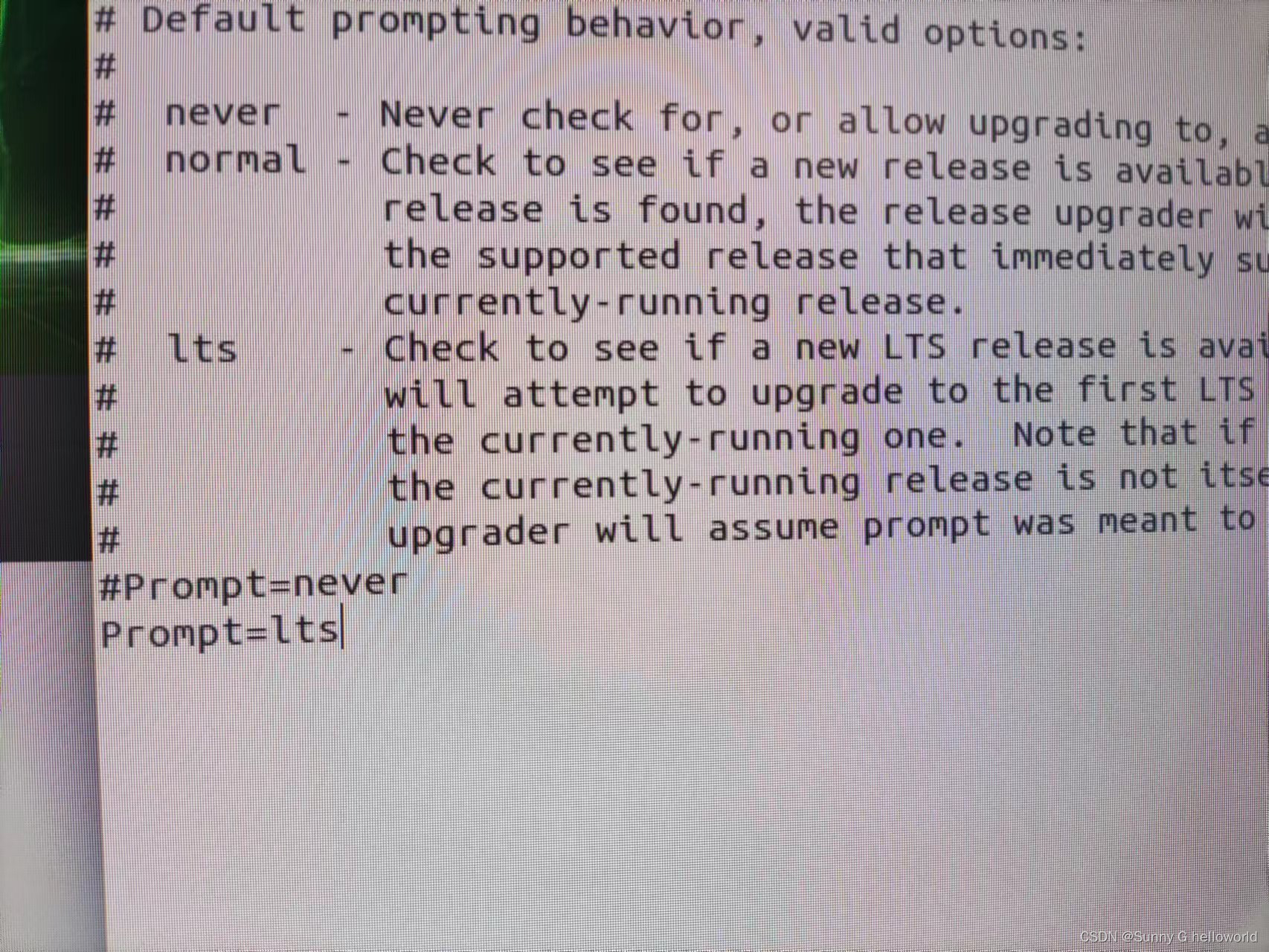
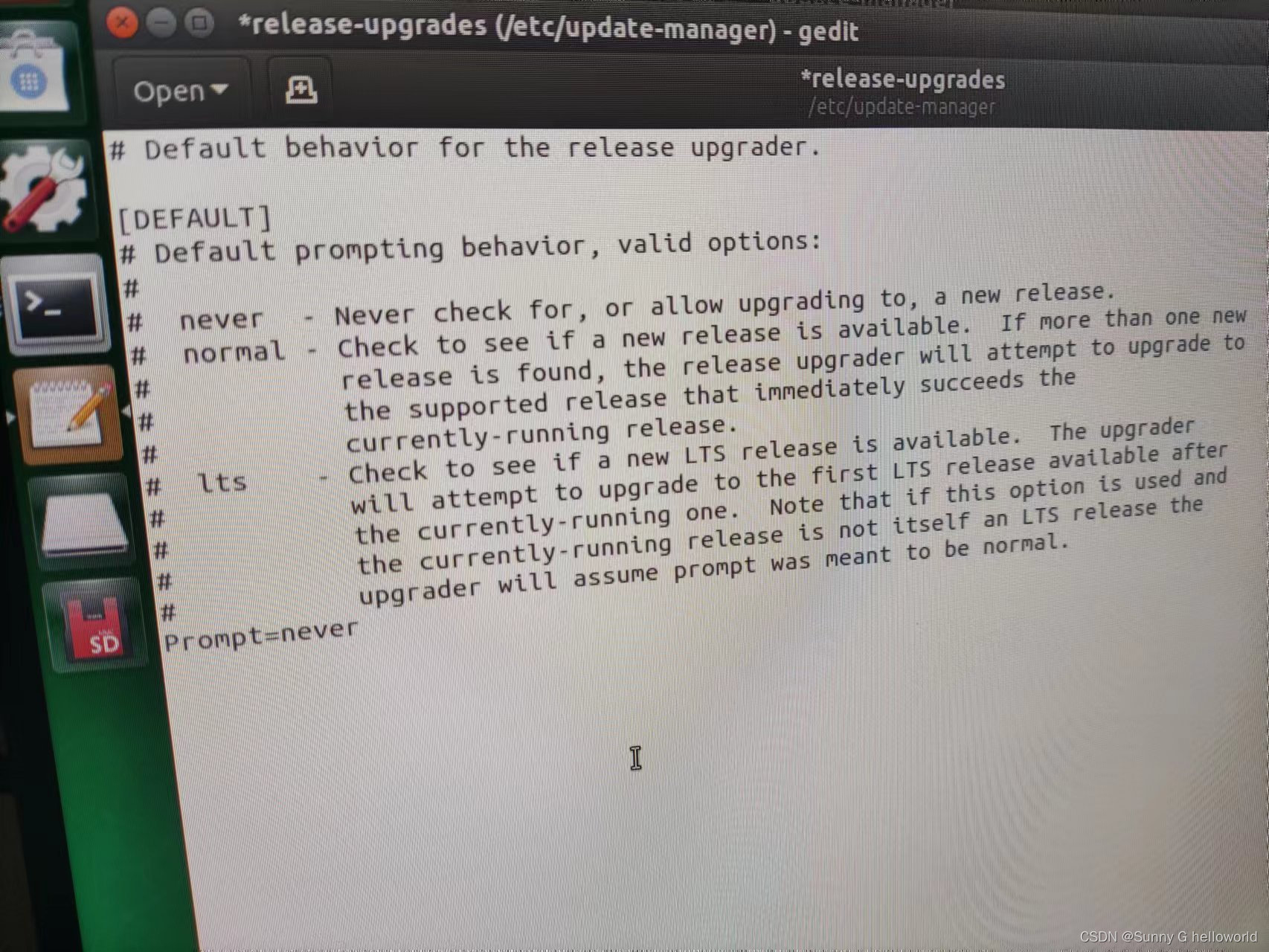
然后进入/etc/update-manager/release-upgrades,修改为Prompt=lts,将never注释,如图
如果文件为只读模式,可以在【文件目录】下打开终端,输入
sudo chmod 777 *
开启编辑权限
终端输入
sudo apt update
sudo apt dist-upgrade
sudo reboot
重启开机输入
sudo do-release-upgrade -c
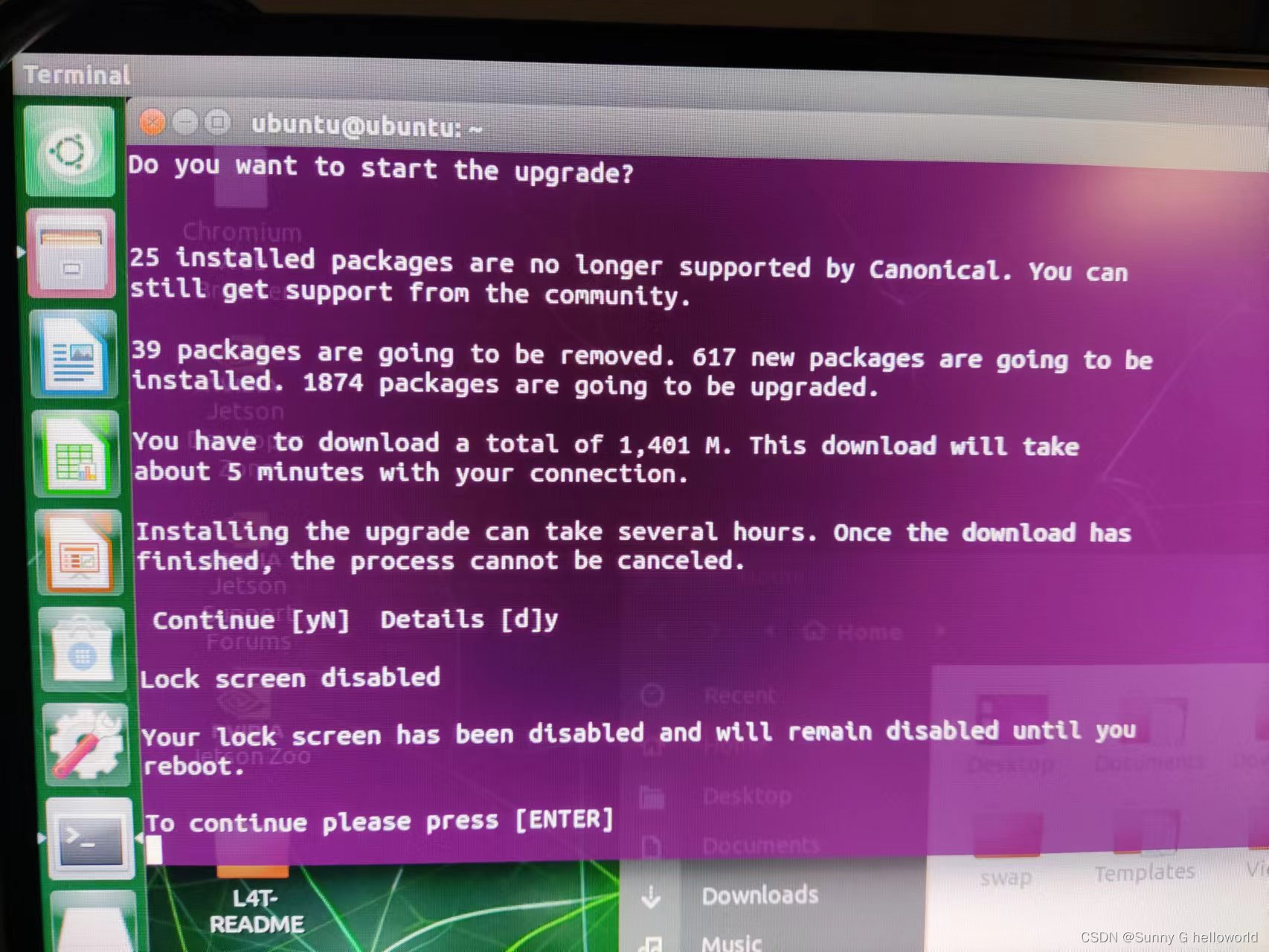
do-release-upgrade
中途页面会让你选择,都选y
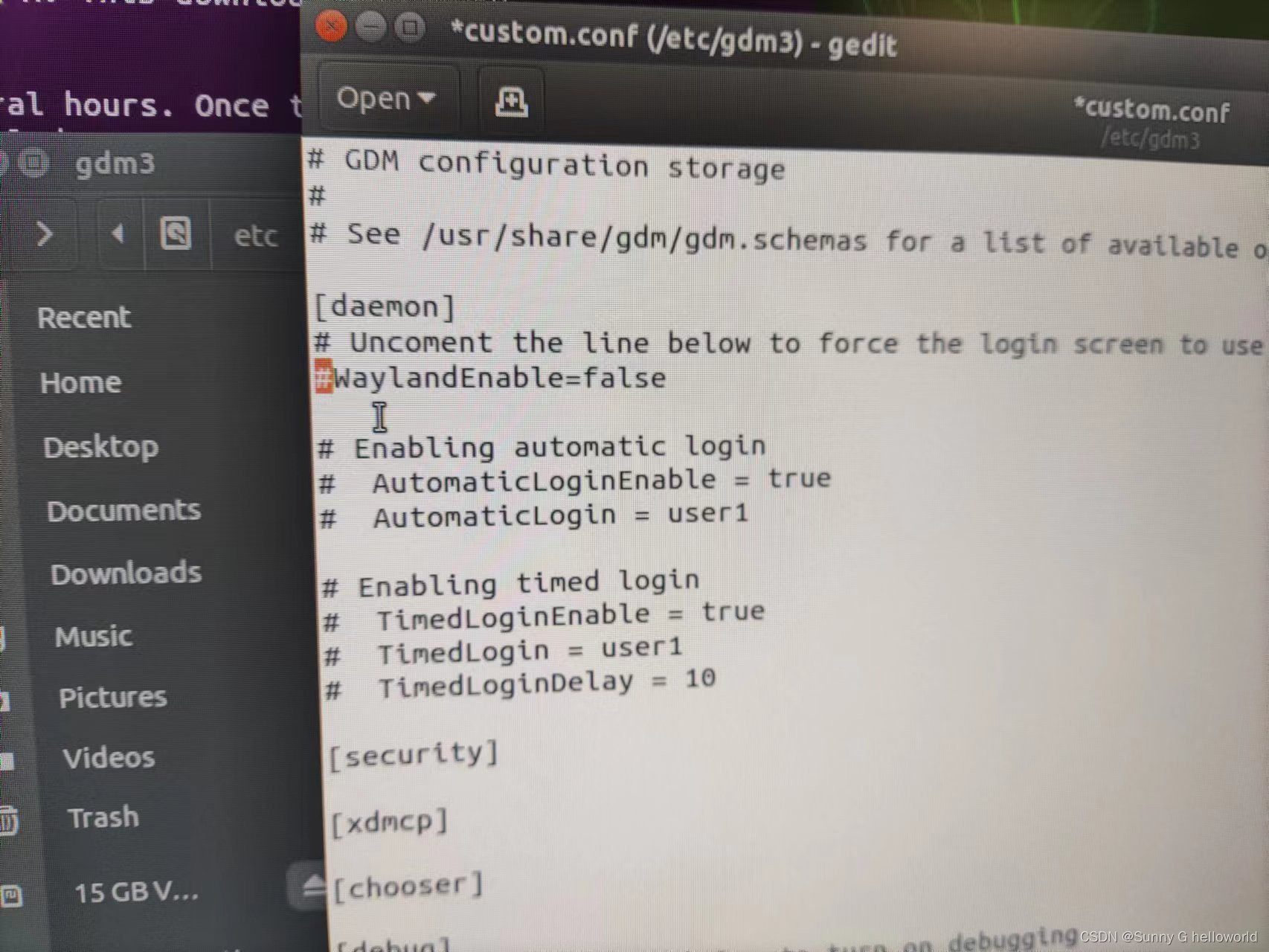
系统安装得七七八八,重启之前这里修改一下文件
/etc/gdm3/custom.conf
如图加一个#
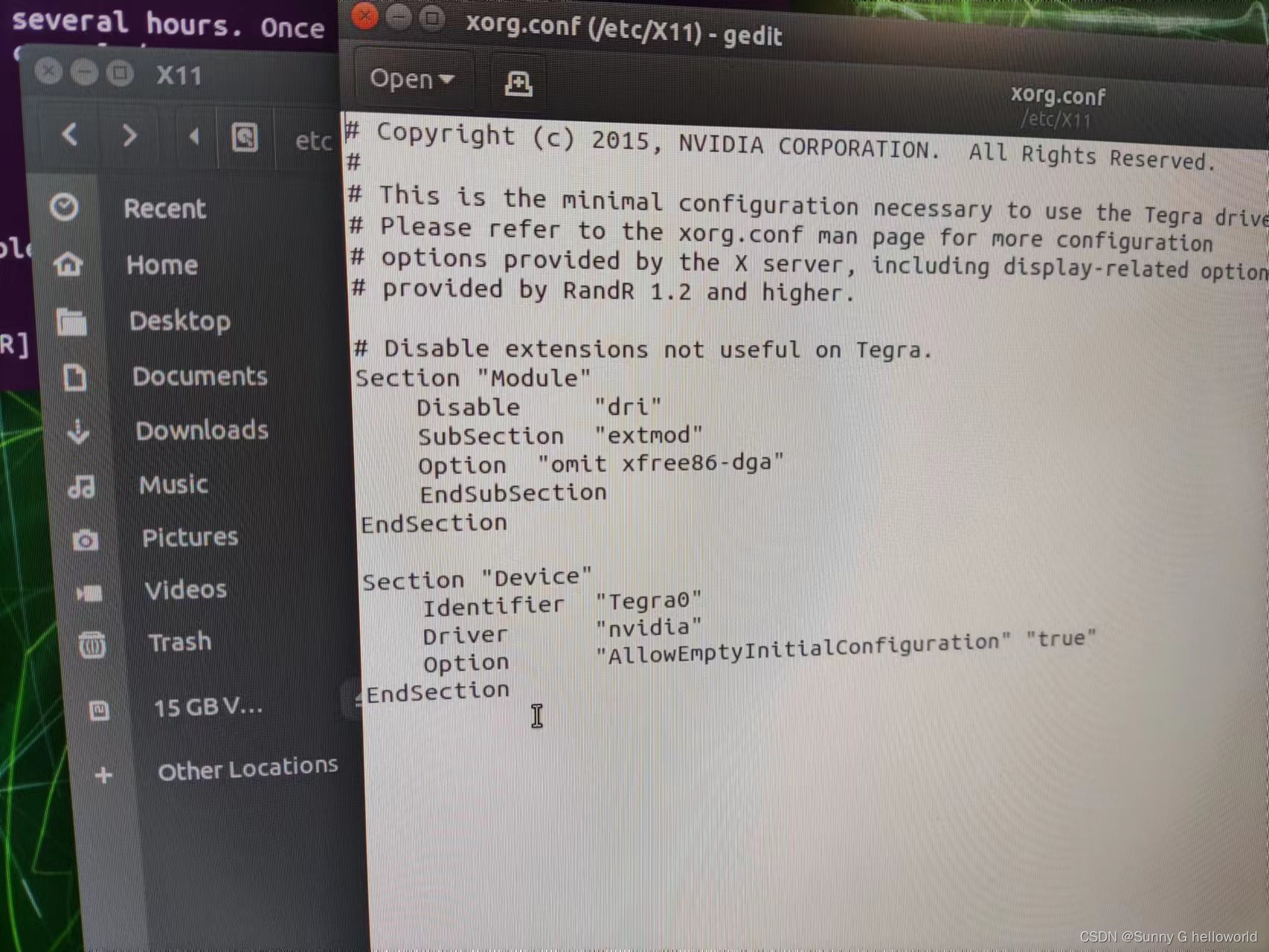
/etc/X11/xorg.conf
/etc/update-manager/release-upgrades
将之前改的lts改回
重启
这里可能终端打不开,可以分别尝试从ctrl+alt+T,桌面图标,或者鼠标右键打开,重启完出来terminal会恢复正常

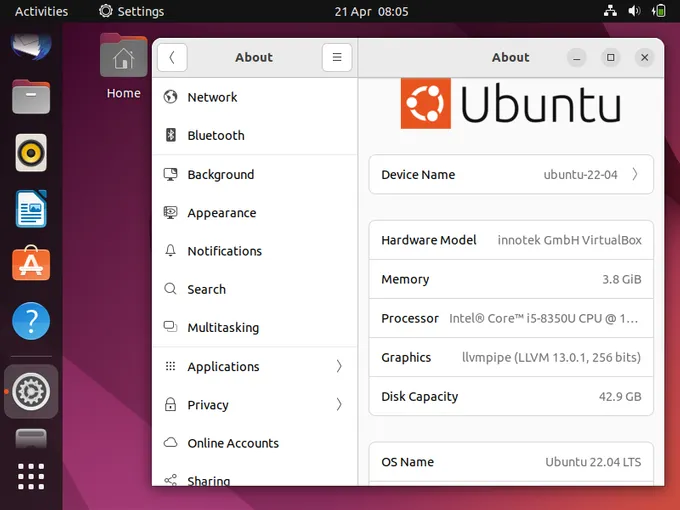
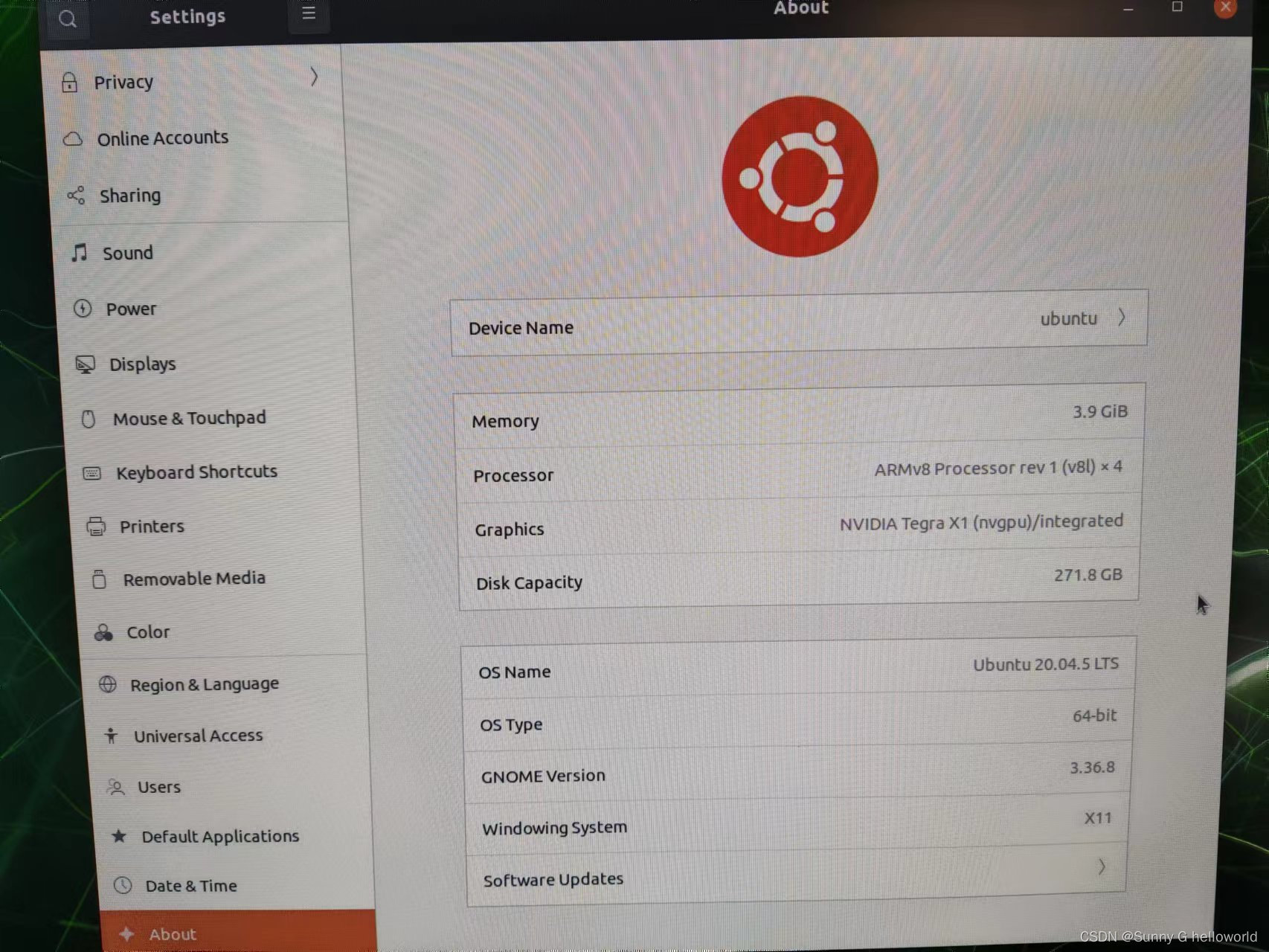
查看属性,升级完成
步骤参考自
Jetson Nano 系统升级至Ubuntu 20.04 - 古月居