文章目录
- 描述
- 说明
- 数据信息
- 使用方法
- 动作类型
- jump
- squats
- wave
- walk
- boxing
- jack
- iwr6843isk搭建ROS环境
- 雷达配置参数
- to_txt中数据预处理(二阶段滑窗处理)
- 环境
github链接:
https://gitee.com/justwillpower/iwr6843isk-harbag.git
描述
包含通过iwr6843isk收集的6类人体活动的bag数据,包含将iwr6843isk录制的ROS包解析成txt文件并且拆分训练集和测试集的程序
说明
本文件包含使用iwr6843isk雷达采集6类人体动作的bag文件,并且含有用于bag文件提取/ti_mmwave/radar_scan主题的消息为txt的文件
将消息分为训练集和测试集(最终生成文件夹为to_txt)
使用方式
-
将bag文件放在
bag文件夹中 -
创建文件夹
to_txt -
修改class_names中的种类类型, 训练集的比例
-
python ./rosbag_process.py -
处理后的文件放在to_txt中,其中文件树为
├── README.md ├── bag │ ├── boxing1.bag │ ├── boxing2.bag │ ├── jack1.bag │ ├── jack2.bag │ ├── jump1.bag │ ├── jump2.bag │ ├── squats1.bag │ ├── squats2.bag │ ├── walk1.bag │ ├── walk2.bag │ ├── wave1.bag │ └── wave2.bag ├── info.sh ├── info.png ├── rosbag_process.py └── to_txt├── test│ ├── boxing.txt│ ├── jack.txt│ ├── jump.txt│ ├── squats.txt│ ├── walk.txt│ └── wave.txt└── train├── boxing.txt├── jack.txt├── jump.txt├── squats.txt├── walk.txt└── wave.txt
这里分开后的txt文件还需要经过滑动窗口处理!
详细见TwoStage_sliding_processing文件(这里是为了也能够处理radhar数据集所以这样设计)
数据信息
我们总共采集了114分钟的数据, 相对于radhar数据集我们新增了挥手动作
- 拳击(17分钟)
- 挥手(20分钟)
- 开合跳(20分钟)
- 上下跳(18分钟)
- 行走(19分钟)
- 下蹲(20分钟)

使用方法
-
首先你需要搭建ROS环境
-
安装必要的包
pip install --extra-index-url https://rospypi.github.io/simple/ rosbagpip insatall sklearn -
开始处理
python3 ./rosbag_process.py
动作类型
jump
squats
wave
walk
boxing
jack
iwr6843isk搭建ROS环境
雷达配置参数
| 参数 | 值 |
|---|---|
| Frequency | 60 |
| Azimuth Resolution(deg) | 15 + Elevation |
| Range Resolution(m) | 0.044 |
| Maximum unambiguous Range(m) | 9.02 |
| Maximum Radial Velocity(m/s) | 1.21 |
| Radial velocity resolution(m/s) | 0.16 |
| Frame Duration(msec) | 33.333 |
| Range Detection Threshold (dB) | 15 |
| Doppler Detection Threshold (dB) | 15 |
to_txt中数据预处理(二阶段滑窗处理)
二阶段滑动窗口处理点云发布的数据
环境
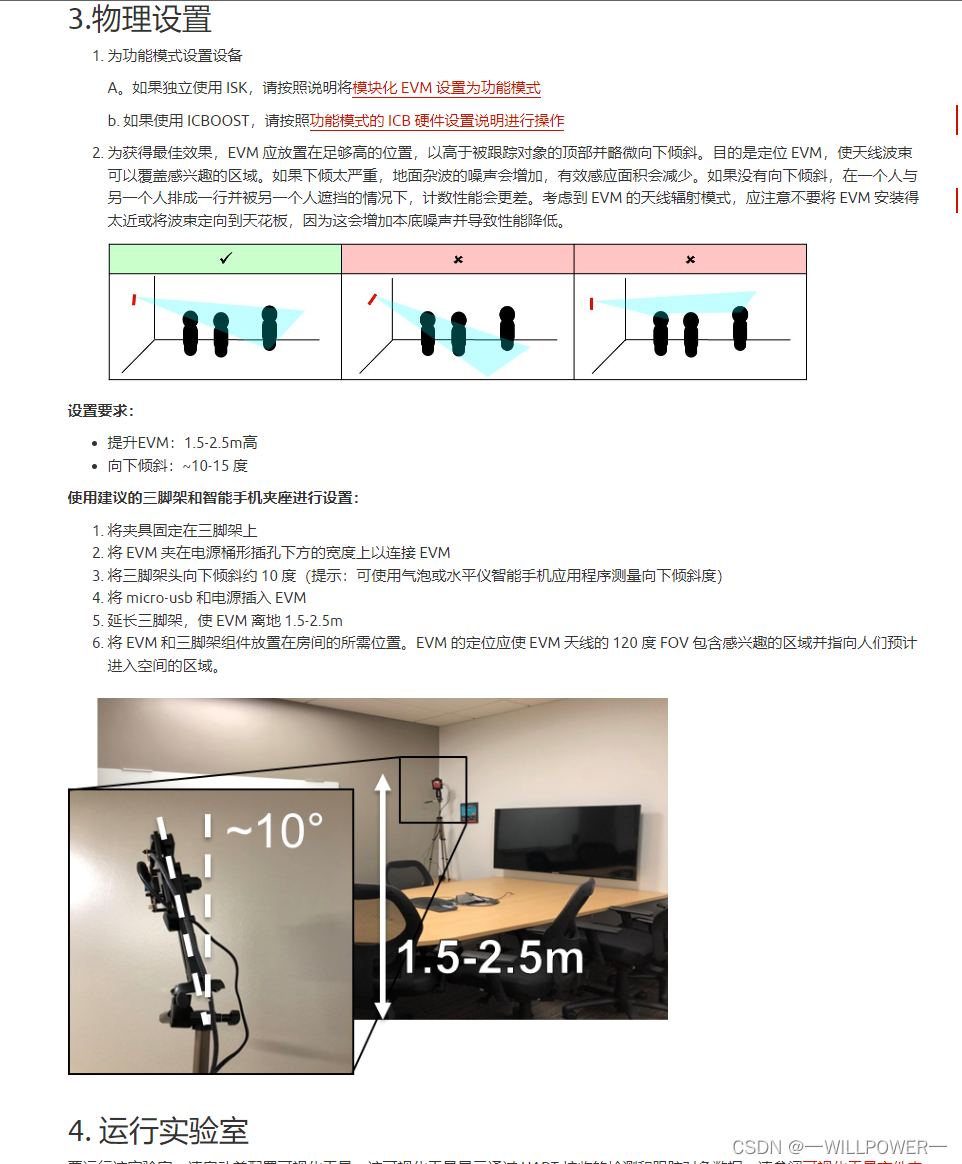
具体放置,和TI的People_counting中设置差不多,1.6m高,向下倾斜5度