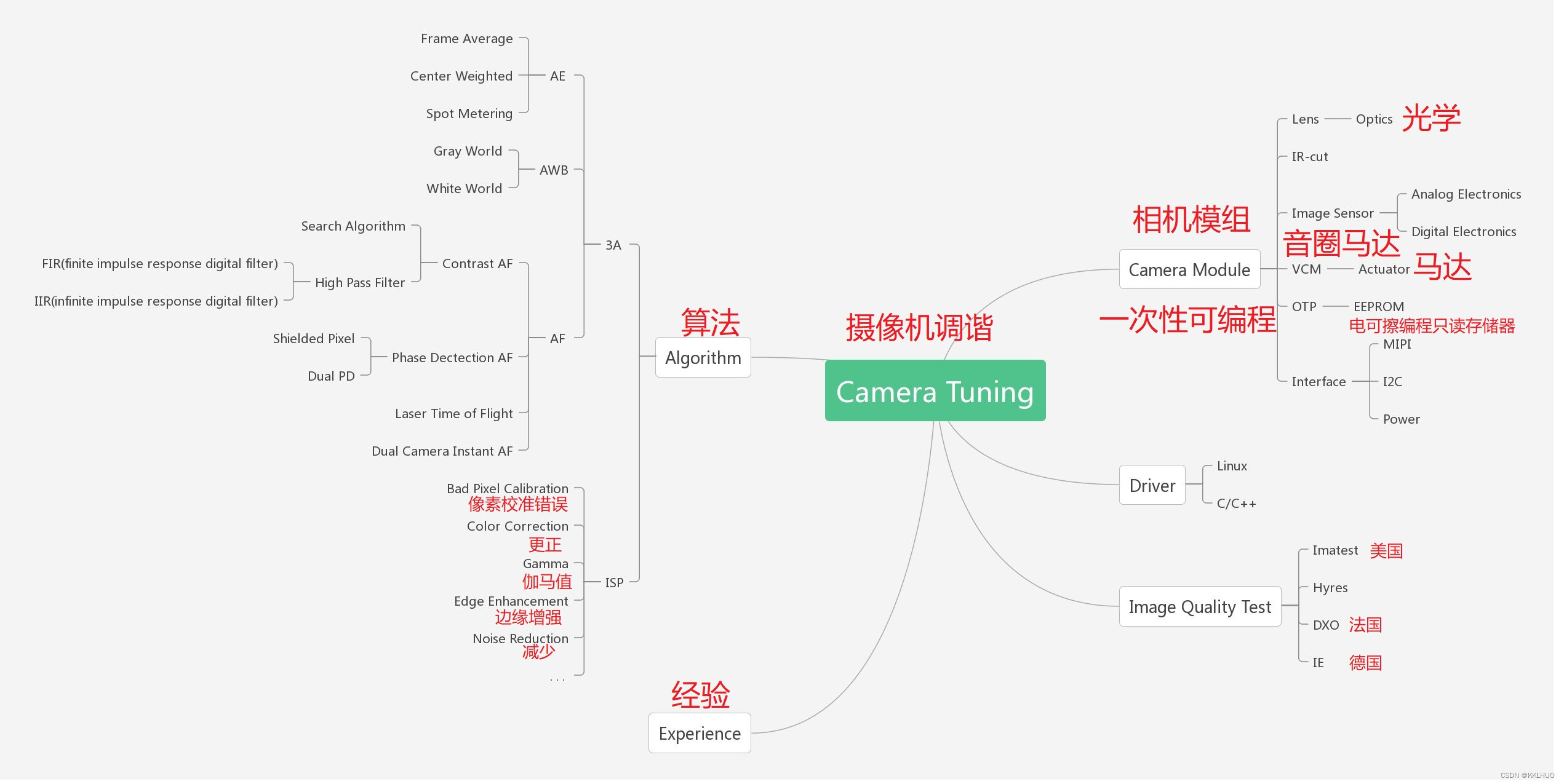
1.tuning是什么
tuning(调谐频率):修改算法参数,让画质达到最优(选定硬件,提升画质只有tuning,权衡tuning参数,效果较好表现)
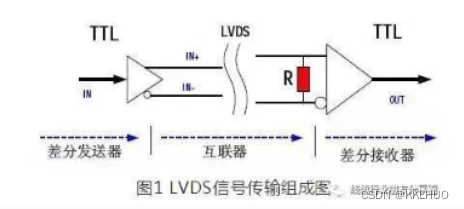
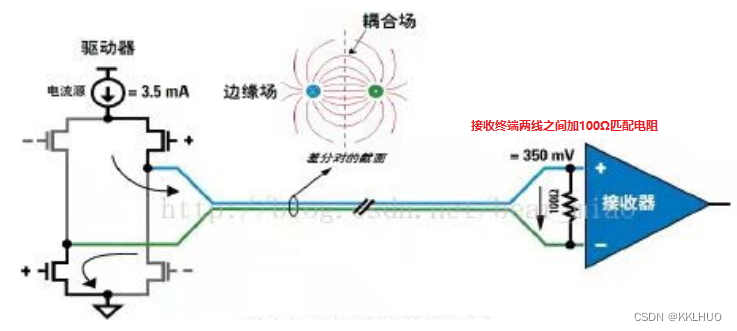
2.LVDS传输
低电压差分信号(LVDS),振幅相同,相位相反;支持8,16,18,32bit;支持速率155Mbps(77MHZ)以上,最高655Mbps,理论1.923Gbps;摆幅350mv
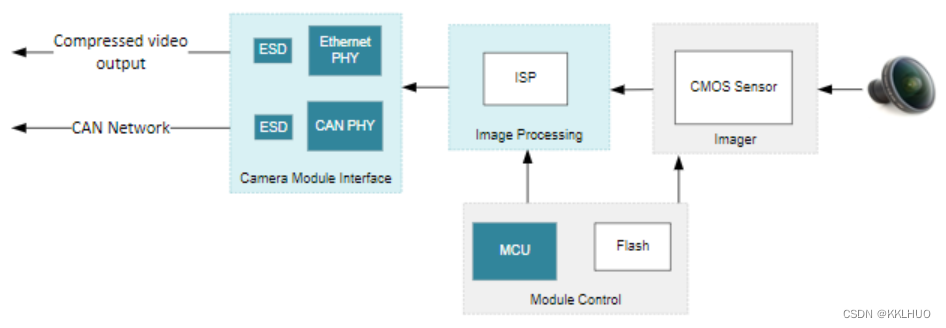
3.摄像头连接方式

模拟输出
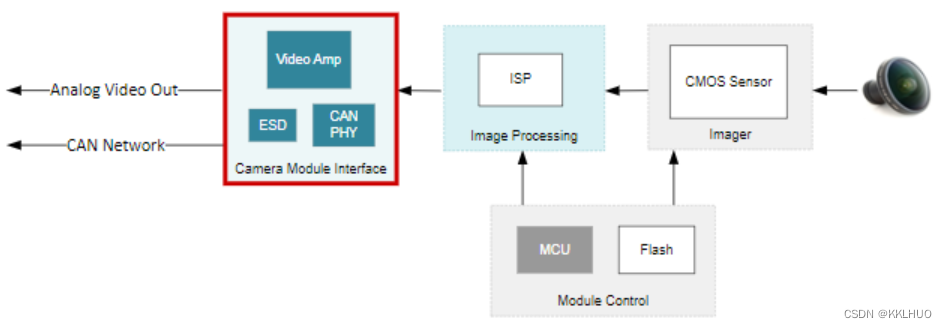
串行数字输出
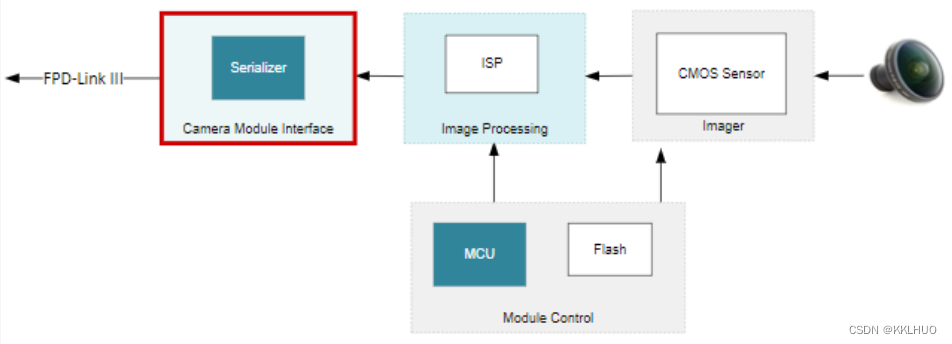
以太网输出
4.码率
码率:压缩完1秒钟的数据(时钟=1s内传输的数据量,mipi接口时钟是示波器测量Clock lane波形频率)
帧率(fps):1s内传输的图像帧数
位深:一个像素需要多少bit表示(rgb888--->3*8=24bit;rgb565--->5+6+5=16bit)
clk=H*V*fps*位深/通道数/2(H:一行像素数:V:总共行数;双边沿采样,一个时钟2个bit数据)
H=HSYNC(行同步)+HBP(水平后肩)+HACTIVE(水平显示周期)+HFP(水平前肩)
V=VSYNC(场同步)+VBP(垂直后肩)+VACTIVE(垂直显示周期)+VFP(垂直前肩)
场同步:高速电子枪控制器下面要开始新的画面,表示新的一帧图像开始
行同步:下面要开始新的一行像素,每一行开始都有一个
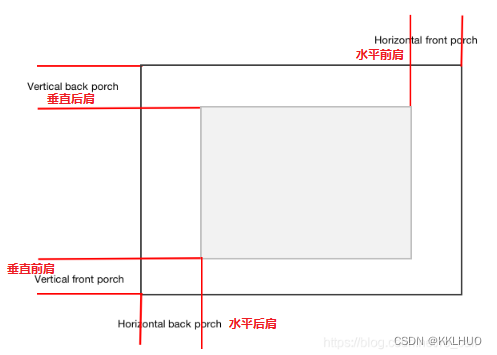
例如:HFP=48,HBP=48,HSYNC=32,VFP=8,VBP=8,VSYNC=4,HACTIVE=1920,VAVTIVE=1080,图像格式=rgb888,fps=60,lane=4
clock=H*V*fps*位深/通道数/2
=(HSYNC+HBP+HACTIVE+HFP)*(VSYNC+VBP+VACTIVE+VFP)*60*24/4/2
=405504000 Hz=405.50 Mhz
5.mipi测试
分为D-PHY物理层测试和逻辑层测试
6.mipi协议
应用层,协议层,物理层组成
7.layout要求(MIPI/LVDS)
并口:
数据时钟线偏差<300mil
3W走线规则(相邻中心距不小于3倍线宽,规避70%电场干扰):减少线间串扰,中心距>=3W

信号线最大<5000mil(12.7cm)
CK0和CK1偏差<500mil
差分对偏差<5mil,差分阻抗=100Ω±10%
MIPI0数据和CK0偏差<300mil
MIPI1数据和CK1偏差<300mil
其他:
等长注意对称性,蛇形线不能太密集,为4W,等长在焊盘附近解决,倒三角走线
避免直角和锐角,产生反射,影响高速传输
8.相机数据传输接口
工业相机:CVBS,GigE(千兆以太网通信协议),USB3.0
普通相机:并口(parallel),串口(serial),USB口
并口(DVP接口):一次传输8或12位;线多,不能过长,时钟极限96MHZ,最大速率>72M
串口:
MIPI接口:1对时钟,1-4lane对数据线,单lane最高传输速率270Mbps(1-4lane选择=带宽满足分辨率和刷新率)
9.光纤传输
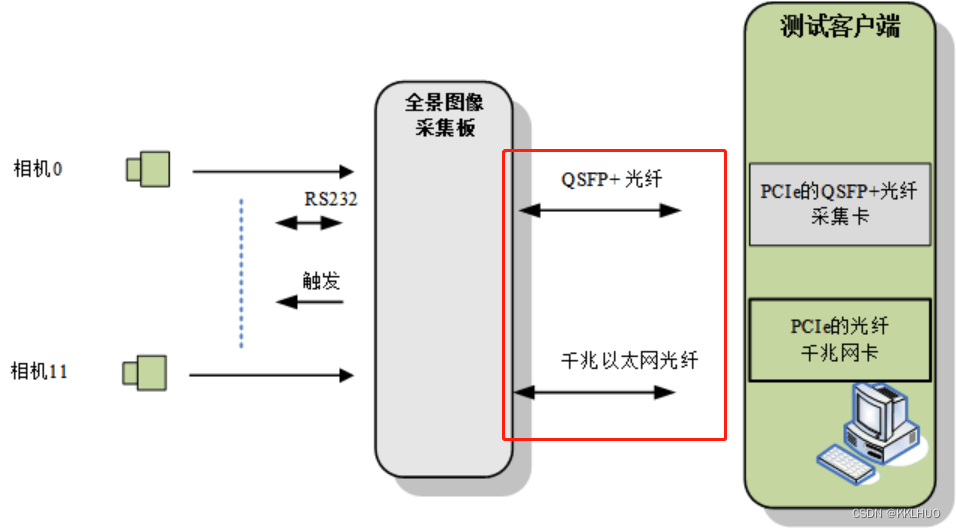
网络摄像机+光纤+收发器
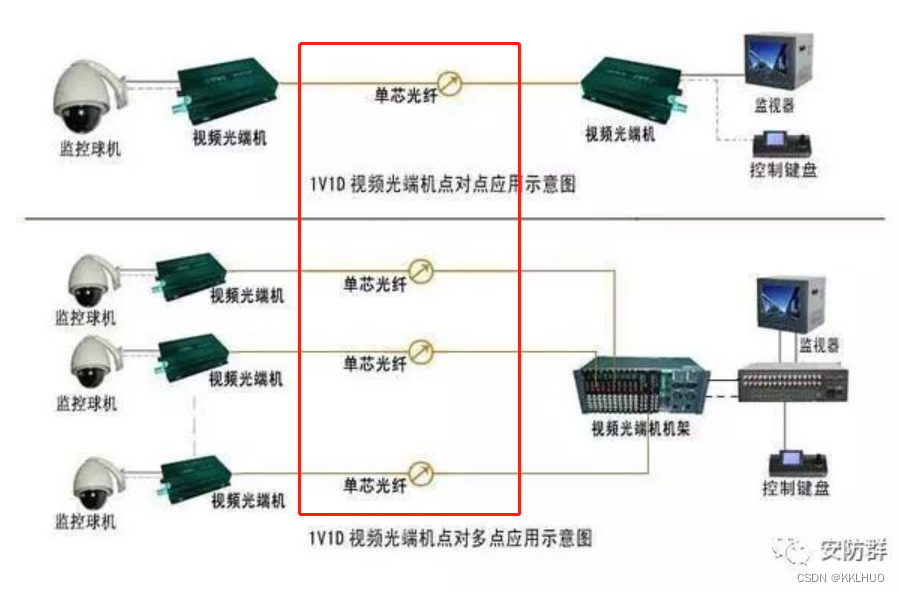
超过100m考虑用光纤(可以传输20公里)
光纤传输数据,把数据信号转换成光信号,再把光信号转换成数据信号
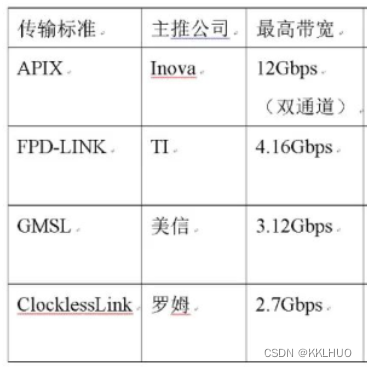
9.车用传输总线
10.摄像头帧率,功耗,时钟频率,图像格式
OV4689:
帧率:1920*1080(120fps);672*380(330fps);2688*1520(90fps)
功耗:163mA(261mW)
输入时钟频率:6-64M
输出格式:10-bit RAW RGB(RAW格式是sensor输出格式,未经处理数据,接受到的各种光的强度;RAW Data,BT1120,BT656,BT601格式)
有效像素:400万;500W(OS05A10);230万(AR0234CS)
11.视频编解码
Hi3516
视频编码协议:H.264,H.265
视频编码处理性能:1920*1080(30fps)
1组差分时钟对于4组差分数据
MIPI数据率最大=1Gbps
13.电压
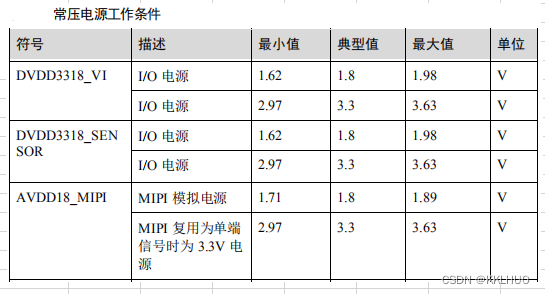
Sensor时钟,复位和配置管脚IO电源(管脚名DVDD3318_SENSOR):支持3.3V或1.8V
MIPI/LVDS接口电源(管脚名AVDD18_MIPI):连接3.3V或1.8V
Hi3516A的MIPI/LVDS管脚可以复用成并行数据功能,支持3.3V或1.8V
当使用MIPI或LVDS模块时,AVDD18_MIPI必须接1.8V
当MIPI/LVDS管脚复用为并行数据功能时,AVDD18_MIPI接3.3V或1.8V
VI接口电源(管脚名DVDD3318_VI):支持3.3V和1.8V




