北斗系统服务规划
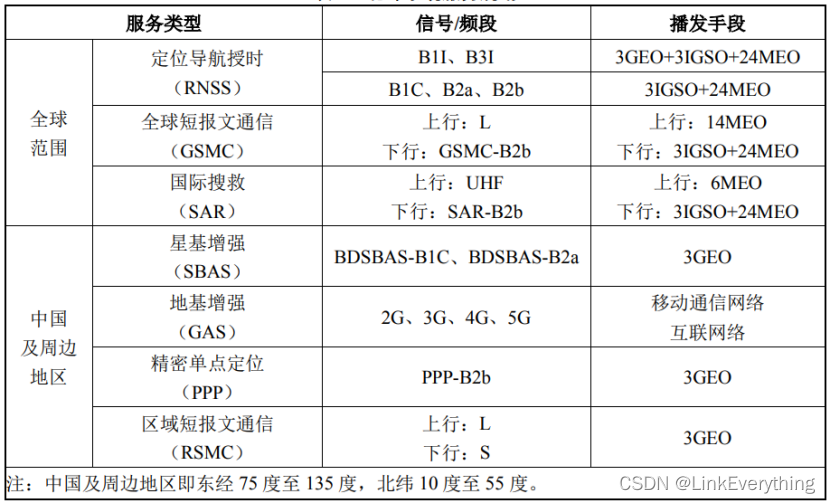
北斗系统具备导航定位和通信数传两大功能,提供七种服务。具体包括:面向全球范围,提供定位导航授时(RNSS)、全球短报文通信(GSMC)和国际搜救(SAR)三种服务;在中国及周边地区,提供星基增强(SBAS)、地基增强(GAS)、精密单点定位(PPP)和区域短报文通信(RSMC)四种服务。其中,2018年12月RNSS服务已向全球开通,2019年12月GSMC、SAR和GAS服务已具备能力,2020年SBAS、PPP和RSMC服务将形成能力。
定位导航授时服务概述
北斗二号标称空间星座由5颗GEO(地球静止轨道,Geostationary Earth Orbit)卫星、5颗IGSO(倾斜地球同步轨道,Inclined GeoSynchronous Orbit)卫星和4颗MEO(中圆地球轨道,Medium Earth Orbit)卫星组成,并视情部署在轨备份卫星。GEO卫星轨道高度35786千米,分别定点于东经58.75度、80度、110.5度、140度和160度;IGSO卫星轨道高度35786千米,轨道倾角55度;MEO卫星轨道高度21528千米,轨道倾角55度。
北斗三号基本空间星座由3颗GEO(地球静止轨道,Geostationary Earth Orbit)卫星、3颗IGSO(倾斜地球同步轨道,Inclined GeoSynchronous Orbit)卫星和24颗MEO(中圆地球轨道,Medium Earth Orbit)卫星组成,并视情部署在轨备份卫星。GEO卫星轨道高度35786千米,分别定点于东经80度、110.5度和140度;IGSO卫星轨道高度35786千米,轨道倾角55度;MEO卫星轨道高度21528千米,轨道倾角55度。
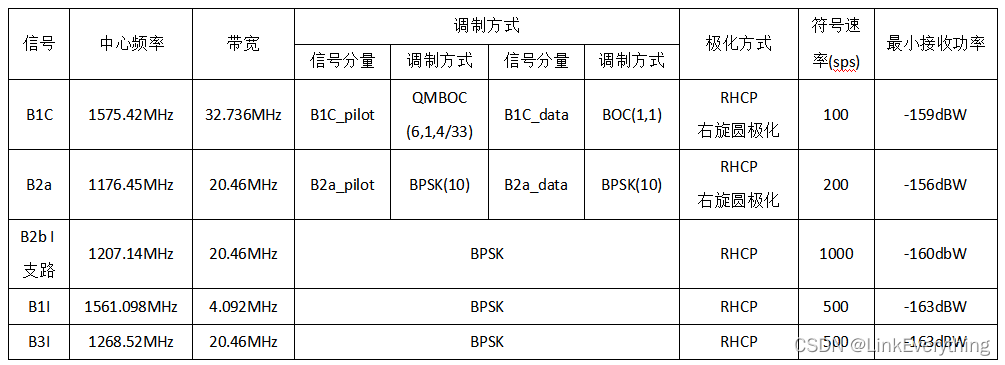
RNSS(Radio Navigation Satellite Service,定位导航授时服务)通过北斗系统空间星座中卫星的 B1C、B2a、B2b 和 B1I、B3I 信号提供,用户通过该服务可确定自己的位置、速度和时间。RNSS服务由北斗二号和北斗三号星座联合提供。
各信号空口射频特征
定位导航授时服务主要性能指标
主要指标包括空间信号精度、连续性和可用性,定位、测速、授时精度和服务可用性等。
空间信号测距误差(SISRE,已知用户位置和钟差条件下,观测卫星空间信号所得到的伪距测量值与采用导航电文参数所得到的星地距离值之差)精度: 最低2米;
空间信号测距变化率误差(SISRRE,空间信号测距误差对时间的一阶导数)精度:<=0.02米/秒;
空间信号测距二阶变化率误差(SISRAE,空间信号测距误差对时间的二阶导数)精度:<=0.008米/秒平方;
协调世界时偏差误差(UTCOE,北斗时(BDT)与协调世界时(UTC(NTSC))偏差的误差)精度:<=20纳秒;
空间信号连续性(是指一个“健康”状态的公开服务空间信号能在规定时间段内不发生非计划中断而持续工作的概率):<=0.998/小时;
空间信号可用性(指北斗系统标称空间星座中规定的轨道位置上的卫星提供“健康”状态的空间信号的概率):>=0.98;
定位精度(用户使用公开服务信号确定的位置与其真实位置之差的统计值,包括水平定位精度和垂直定位精度):最低<=9米;
测速精度指标(用户使用公开服务信号确定的速度与其真实速度之差的统计值):<= 0.2米/秒;
授时精度指标(用户使用公开服务信号确定的时间与 BDT 之差的统计值):<=20纳秒。
参考:
- 北斗卫星导航系统公开服务性能规范
- 北斗卫星导航系统空间信号接口控制文件公开服务信号B1C
- 北斗卫星导航系统空间信号接口控制文件公开服务信号B2a
- 北斗卫星导航系统空间信号接口控制文件公开服务信号B2b
- 北斗卫星导航系统空间信号接口控制文件公开服务信号B1I
- 北斗卫星导航系统空间信号接口控制文件公开服务信号B3I
- 北斗卫星导航系统应用服务体系