DELL服务器集成raid卡PERC S100_S300详细配置手册
分享到:
作者来源: 未知 发布时间:2014-09-26
此文档为自行整理,非官方提供资料,仅供参考。疏漏之处敬请反馈。
对RAID进行操作很可能会导致数据丢失,请在操作之前务必将重要数据妥善备份
raid卡支持的级别及RAID级别最少需要的硬盘数量,RAID0<=1 RAID1=2 RAID5>=3 RAID10=4
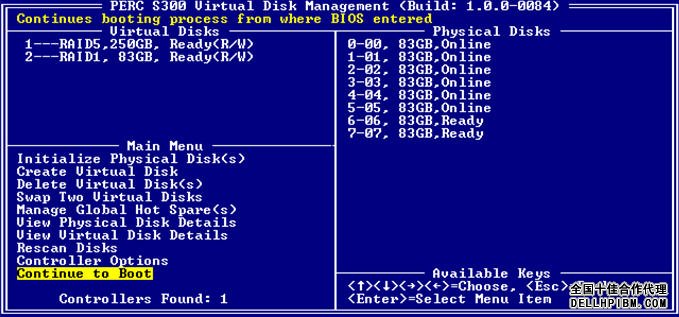
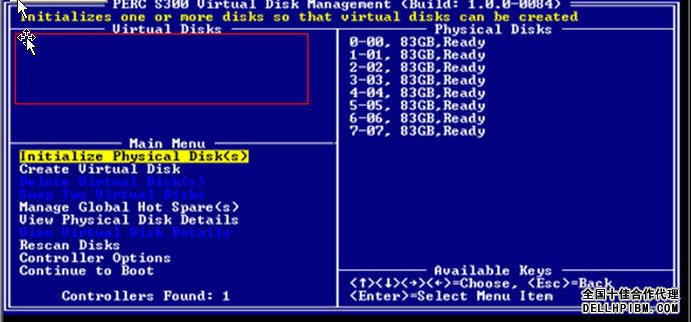
开机自检按Ctrl+R进raid配置界面
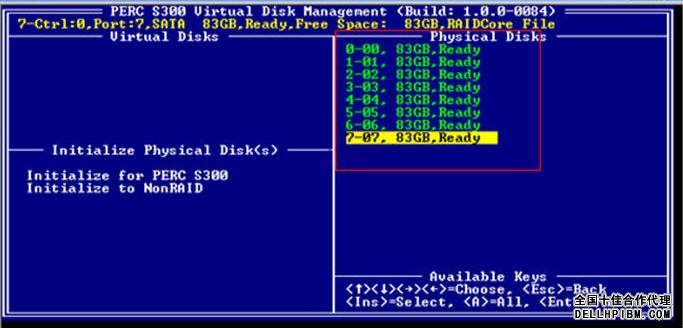
创建磁盘,首先需要将磁盘初始化。光标移至Initialize Physical Disk(s)选回车

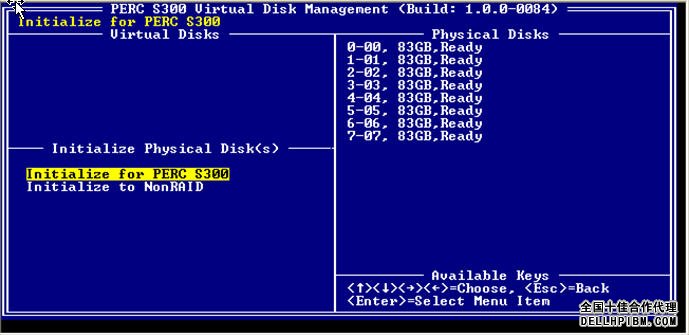
用INS插入键将需要配置虚拟磁盘的硬盘选中
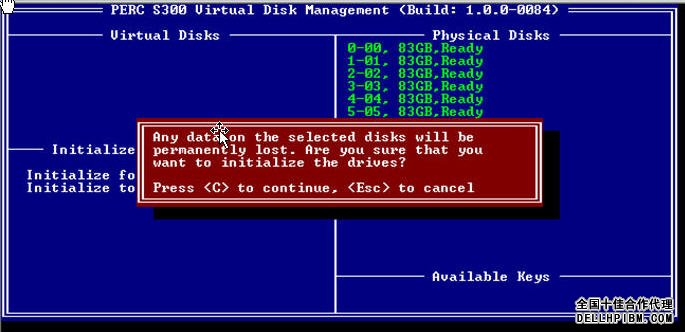
按C键初始化硬盘
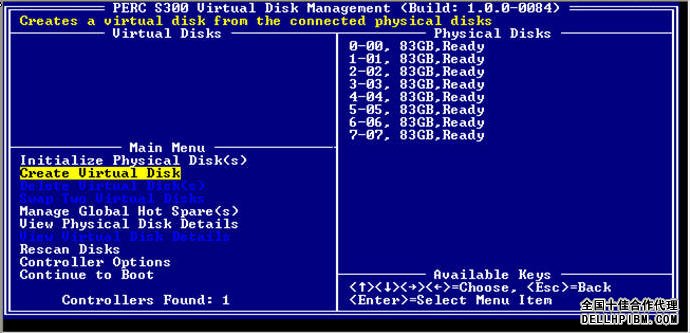
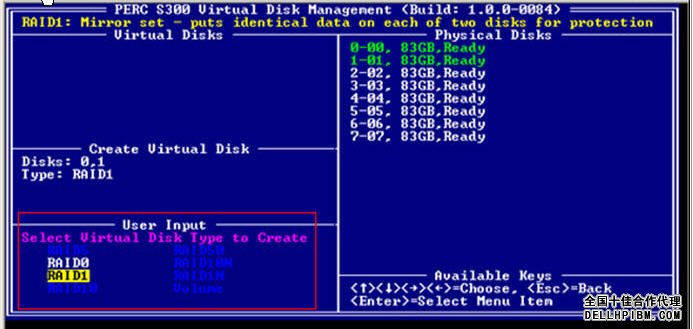
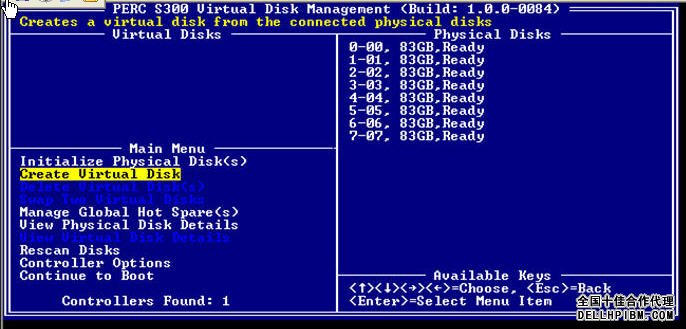
初始化完选Create Virtual Disk选项。开始创建虚拟磁盘
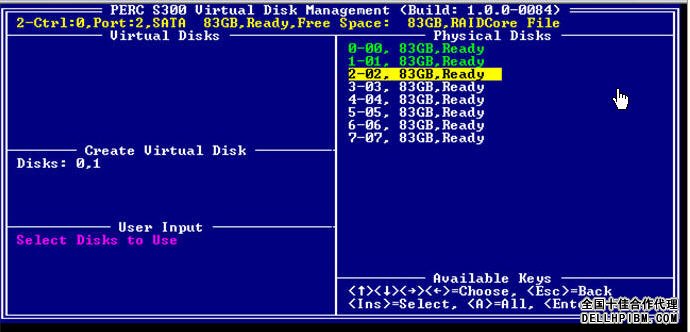
用Ins插入键选中需要配置虚拟磁盘的硬盘
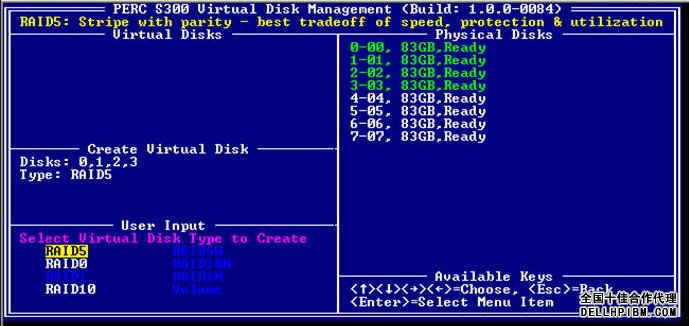
(这里我们以raid1为例)选中raid1按回车
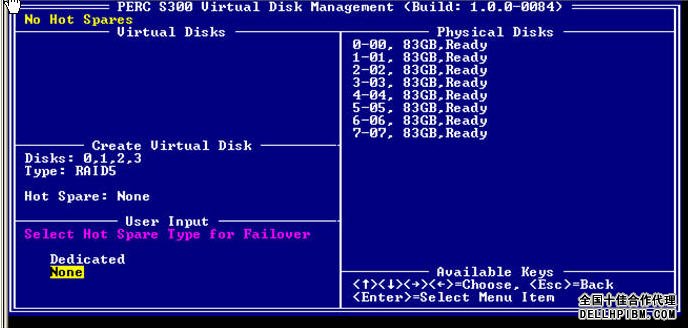
选择热备,如果需要选择Dedicated,如果不需要配置选None
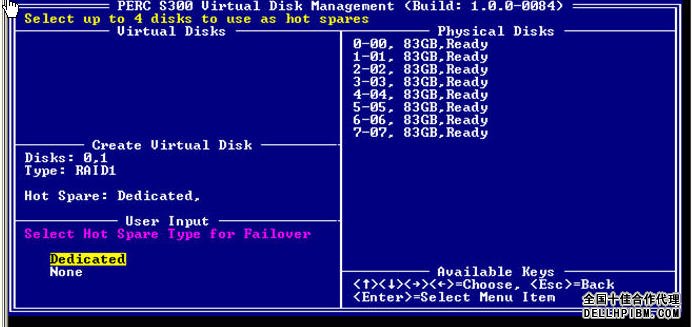
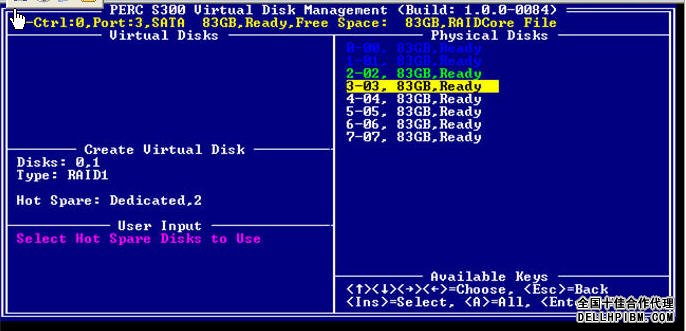
用Ins插入键选择需要配置热备的硬盘。按回车
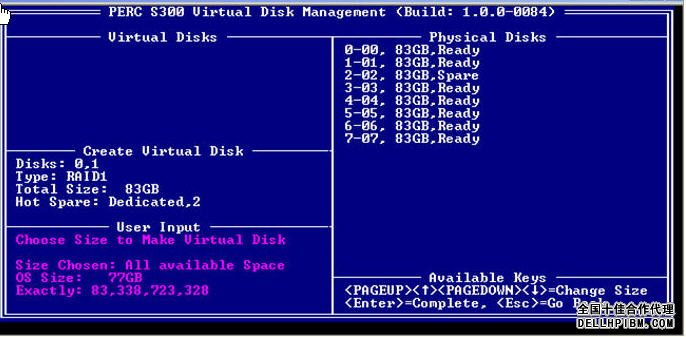
缓存的政策选择,选中读和写
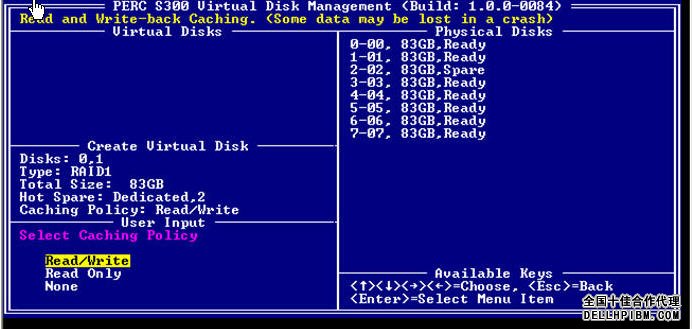
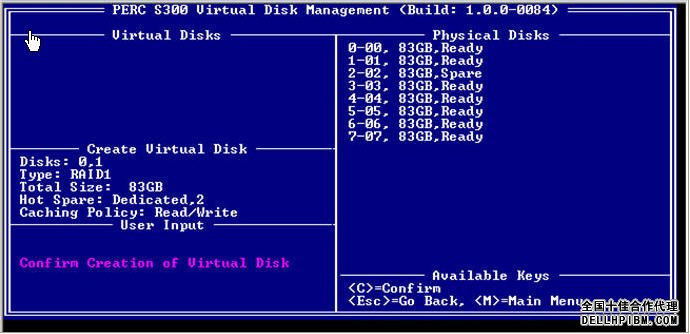
按C创建虚拟磁盘
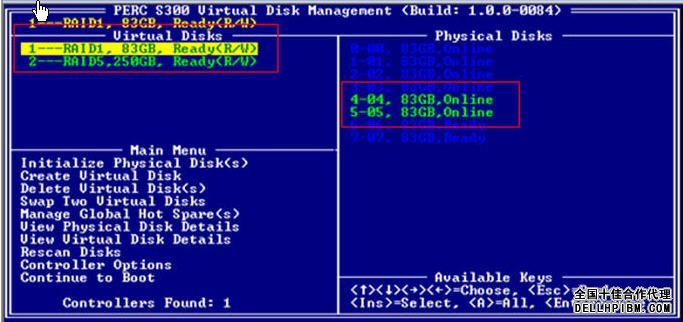
删除虚拟磁盘选中Delete Virtual Disk(s)按回车
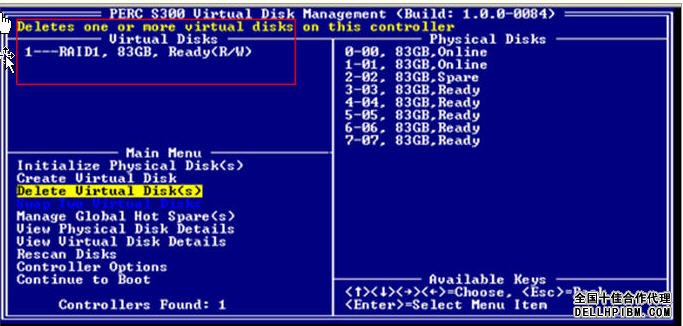
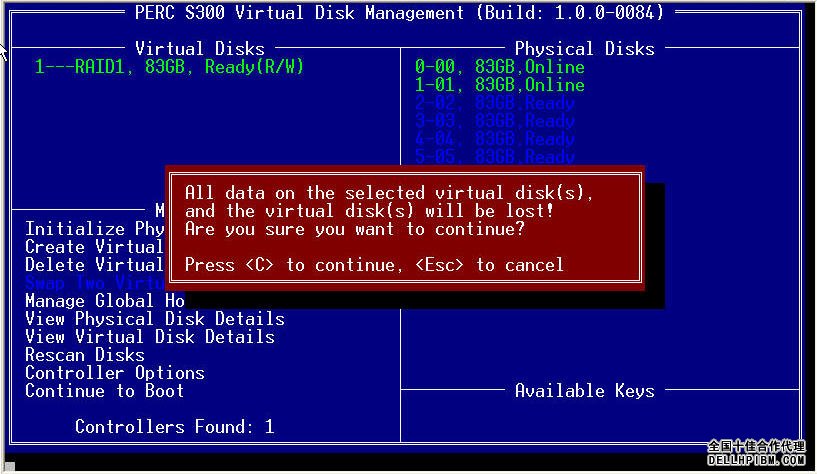
用Ins键插入需要删除的虚拟磁盘,按回车。按C确认
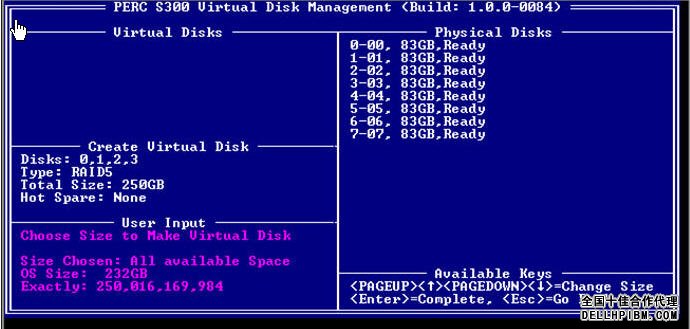
配置raid5,选中创建回车,用Ins键插入需要创建的磁盘
选择raid5,回车
配置热备这里选中None
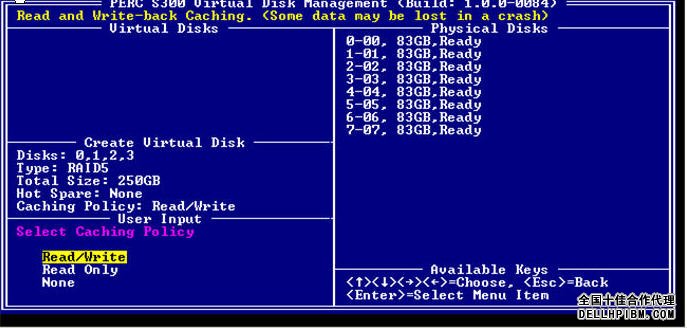
选择读/写策略
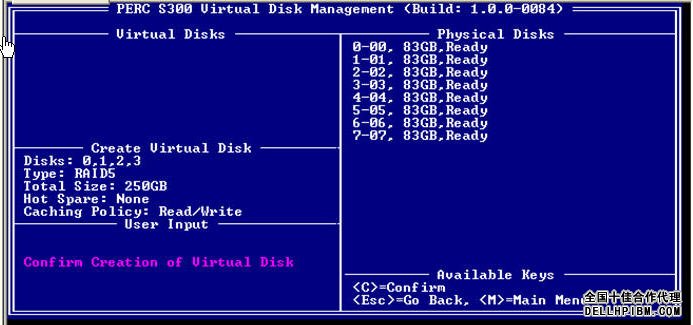
按C创建
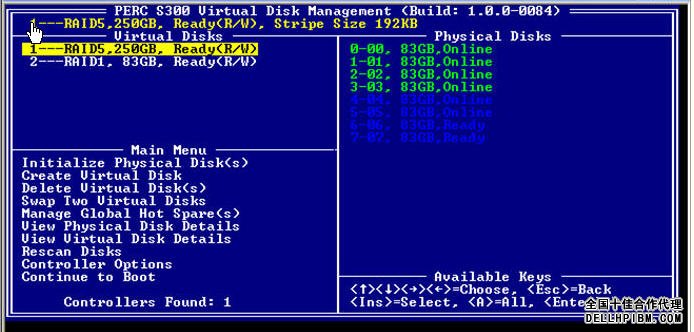
选择交换虚拟磁盘顺序,选择Swap Two Virtual Disks.
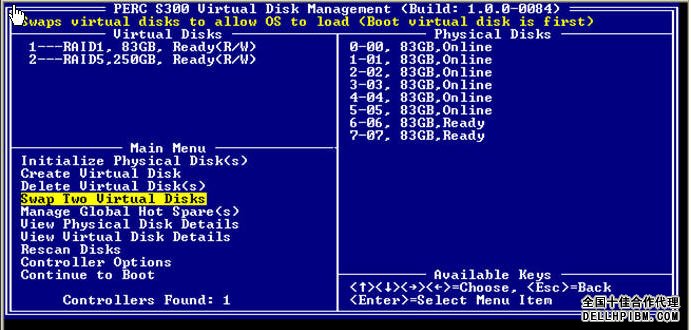
用Ins插入需要交换的虚拟磁盘
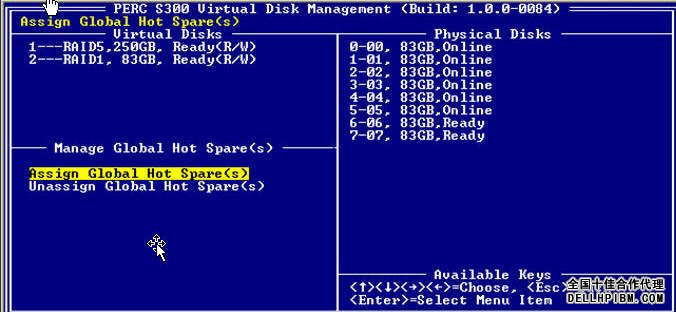
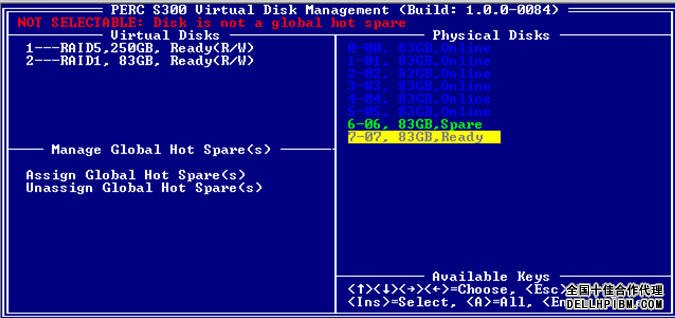
管理全局热备选择 Manage Global Hot Spare(s)按回车有(创建和取消)两个选项
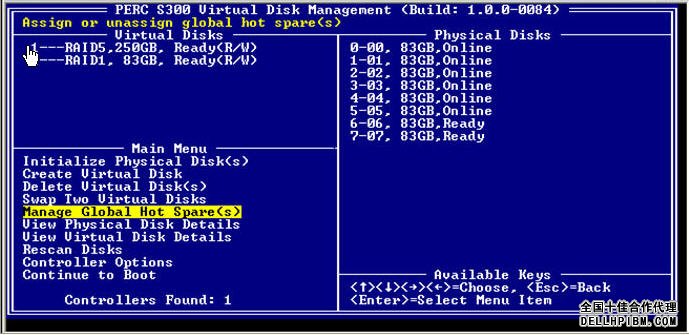
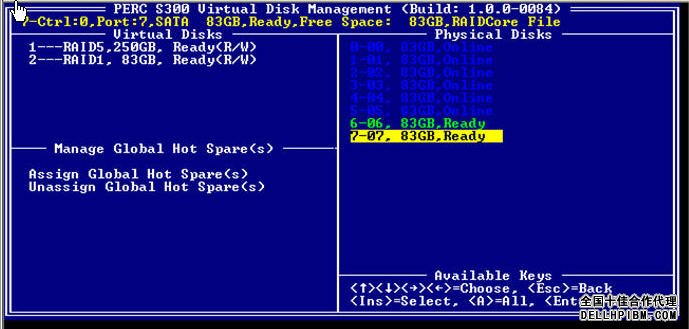
用INS插入需要热备的硬盘
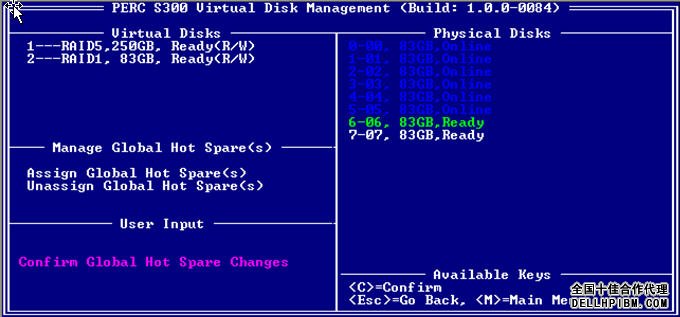
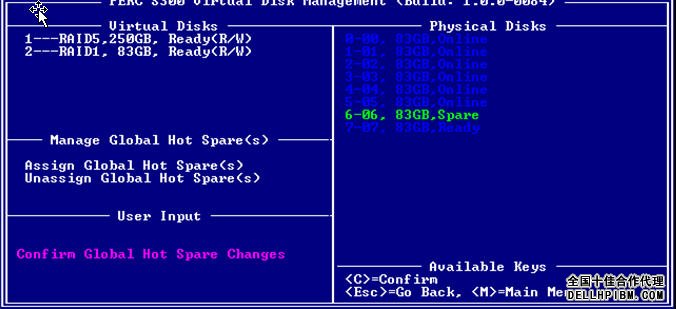
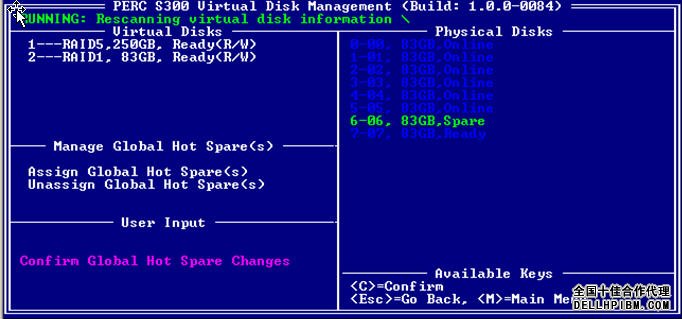
按C创建
移除热备硬盘
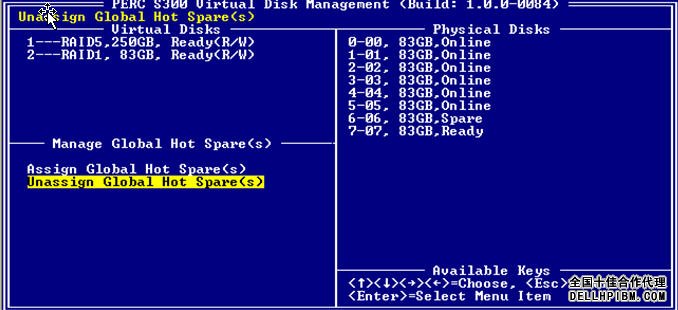
用Ins插入需要移除的硬盘,按回车继续
按C创建
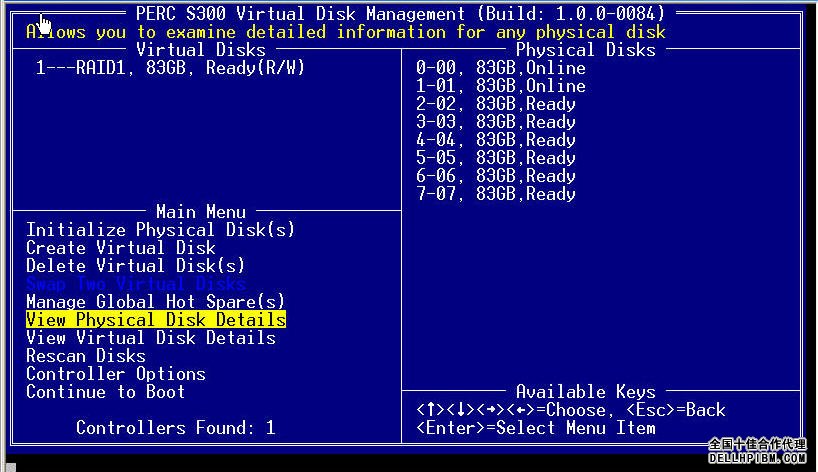
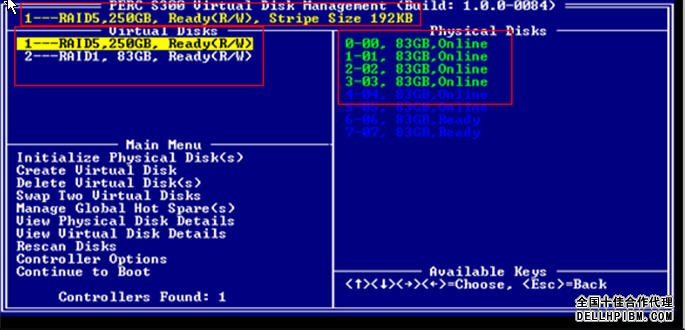
查看物理磁盘选择 View Physical Disk Details选项回车
查看虚拟磁盘选择View Virtual Disk Detail回车
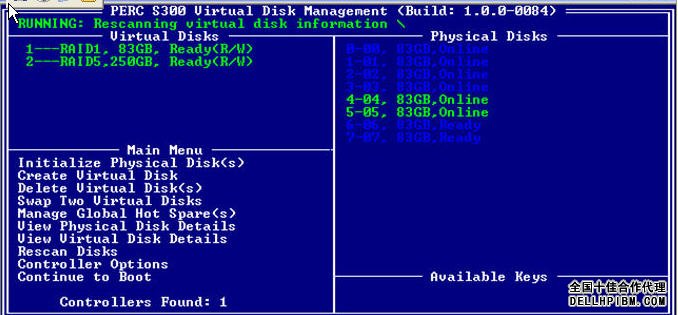
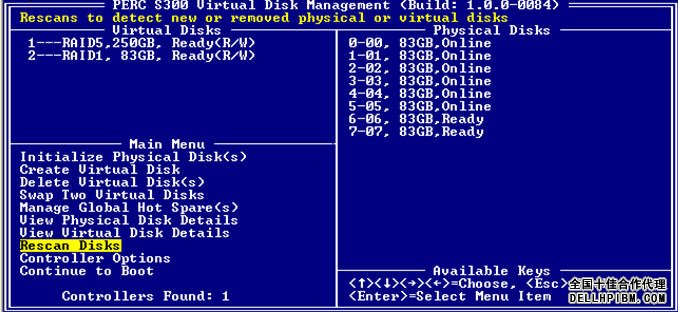
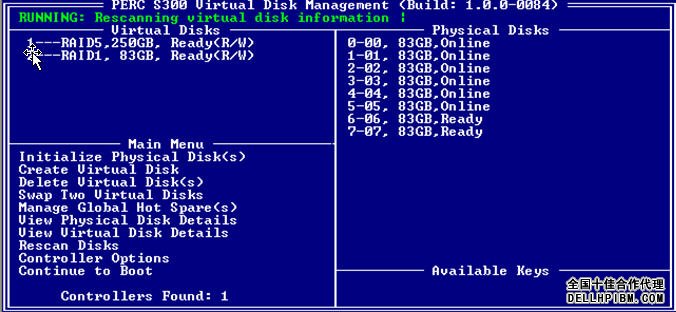
当插入新的硬盘时,如果没有直接认到可以选择Rescan Disks重新扫描一下
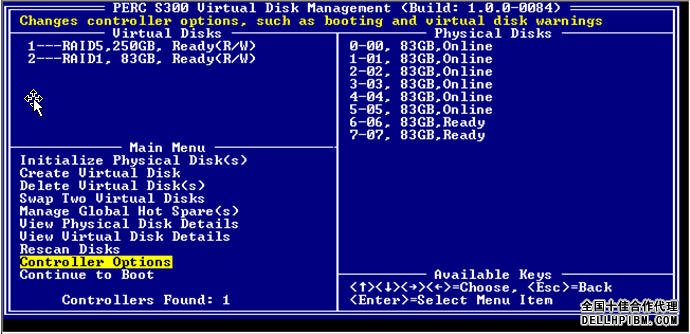
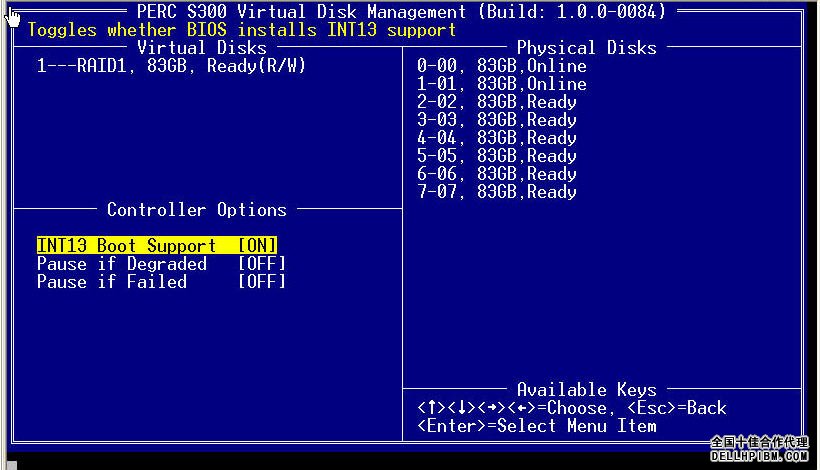
控制器选择回车,
INT13 Boot Support默认为ON。如果设置为OFF,raid卡不启用。如果硬盘连到卡上将认不到硬盘。
Pause if Dearaded 当虚拟磁盘降级时中断启动
Pause if Failed 当虚拟磁盘失败时中断启动
机器重启