我们在使用信捷PLC通过ethercat总线控制伺服驱动器时,可能会需要用到其用于轴控制的指令:
A_PLSF,即“可变速度输出”。
这个指令的特点是运行过程中,速度可以实时改变,实时生效,不需要重新触发。

既然是速度指令,肯定需要设置加减速时间,因为根据实际负载的不同,使用场景的不同,设备在启动和停止时,会有不同的加减速要求。
而这个指令的加减速时间也是可以单独设置的。如下图中红色框内所示:

在官方的指令手册中,对于这条指令有注意事项,请看下图:

请注意第二条,如果默认速度设为0,那么PLC是直接采用阶跃式来进行速度规划,所谓阶跃式,就是如下:

这种变化几乎没有加减速时间,速度的启动停止都是非常快速的,这对于某些负载是不适合的。
所以,需要将默认速度设置为一个不为0的值
信捷PLC中A_PLSF指令的加减速时间设置简析
news/2024/11/23 4:01:16/
相关文章

如何正确设置PlayStation VR
Iren Key/Shutterstock 钥匙扣/快门 The PlayStation VR (PSVR) headset plugs into PS4 and creates a bona fide virtual reality experience. But like all VR headsets, it needs lots of cables. We’ll show you how to plug everything in and set up your room to get …

【转】《与MySQL的零距离接触》第五章:子查询与连接 (5-11:多表连接)
转载出处: 慕课网:《与MySQL的零距离接触》笔记目录https://zhangjia.tv/682.html 5-11:多表连接
多表连接:可通过多个JOIN,把多个表连接在一起 如将A和B与C连接起来:
SELECT A.a,B.b,C.c FROM tabA [JOIN tabB ON c…
【转】《与MySQL的零距离接触》第五章:子查询与连接 (5-6:多表更新)
转载出处: 慕课网:《与MySQL的零距离接触》笔记目录https://zhangjia.tv/682.html 5-6:多表更新
一. 前言
上一节最后我们提到,虽然给商品分类表成功插入了分类记录,但是我们并没有给商品表进行更新操作,…
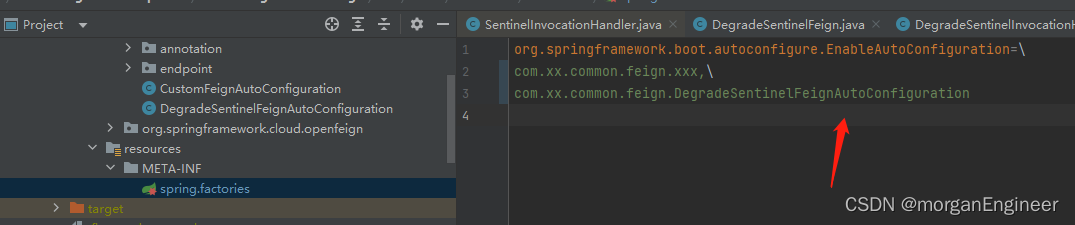
springboot openfeign Sentinel统一降级处理
背景
openfeign降级常规操作如下: 此种方式太过于麻烦,每一个方法都要写一个降级逻辑,并且降级逻辑大多是雷同的。
目标
提供默认的降级方式,若openfeign未指定FallbackFactory则走默认降级方式,否则就走自定义的FallbackFact…
【转】《与MySQL的零距离接触》第五章:子查询与连接 (5-1:数据准备)
转载出处: 慕课网:《与MySQL的零距离接触》笔记目录https://zhangjia.tv/682.html 5-1:数据准备
一. 上节回顾
INSERT(增)UPDATE(删)DELETE(改)SELECT(查&a…

3MySQL数据库-SQL语句下-⾃关联-外键-分表-视图 - 全栈式开发29
一、⾃关联
可以简单的理解为⾃⼰与⾃⼰进⾏连接查询。就是在表里设置了多种id,用来标志各类,由此我们可以通过关系以及id唯一性来进行索引⽐如: ⼀张 areas 表⾥⾯有省市区,各省各市都有两个id,一个用来标志该名称&a…

MySQL学习笔记5:子查询与连接
【1】数据准备 -- 创建数据表 CREATE TABLE IF NOT EXISTS tdb_goods( goods_id SMALLINT UNSIGNED PRIMARY KEY AUTO_INCREMENT, goods_name VARCHAR(150) NOT NULL, goods_cate VARCHAR(40) NOT NULL, brand_name VARCHAR(40) NOT NULL, goods_price DECIMAL(15,3) U…