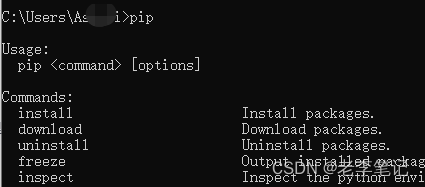
本篇目标:使用STM32F407驱动摄像头OV7670,并上位机显示照片结果。
材料准备:
- STM32F4标准工程:stm32f407自建标准工程(stm32f4标准工程)(git仓库地址)
- STM32F4摄像头测试工程:里面包含ov7670驱动文件、STM32F4摄像头测试工程,上位机测试软件(stm32f4摄像头测试最终工程)(git仓库地址)
摄像头OV7670硬件连接与接口
这里使用的模块是OV7670不带FIFO的版本,使用STM32F407的DCMI+DMA进行数据传输,保证数据的速度,并把数据提取出来发送到上位机显示照片。
摄像头与STM32F4的连接如图:
测试摄像头OV7670驱动
用keil打开STM32F4标准工程,往里面添加代码,测试摄像头OV7670:
- 将准备材料测试工程中的摄像头驱动文件夹(ov7670)拷贝到stm32f407标准工程dev文件夹(新建)下。
- 在Manage Project Items添加文件夹ov7670,然后添加刚才拷贝文件夹下的C文件。
- 在Options->C/C+±>Include Paths添加dev下复制文件夹ov7670的路径。
- 需要修改ov7670.h与sccb.h文件中对应的IO引脚,修改成自己对应的引脚口,应该用注释标出。
- 仔细检查ov7670.c与sccb.c文件中的引脚初始化函数,确认相关RESET、PWDN、SCCB等引脚初始化正确;修改dcmi.c的My_DCMI_Init函数中对于DCMI相关引脚的初始化,与自己的引脚对应。
- 在main.c中添加头文件:
#include "ov7670.h"
#include "dcmi.h"
#include "ov7670test.h"
- 添加全局变量:
extern u8 ov_rev_ok;
- 向main函数中添加代码,如下:
int main(void)
{/* stm32系统配置 */Sys_Config();//新添加if (OV7670_Init() != 0){printf("ov7670 init error.\r\n");}else{OV7670_USART_Init();}while(1){LED1_ON;delay_ms(100);//新添加if (ov_rev_ok){ShanWai_SendCamera(camera_buffer, PIC_WIDTH, PIC_HEIGHT);ov_rev_ok = 0;}else{DCMI_Start();}LED1_OFF;delay_ms(100);}
}
- 编译通过后,烧写进STM32F4,首先观察Printf串口打印,是否有错误信息?
- 连接串口2至PC机,打开山外多功能调试助手->智能车助手:选择对应com口,波特率修改成最大值与代码一致,宽对应代码ov7670.h->PIC_WIDTH宏定义,高对应PIC_HEIGHT宏定义,小端对齐,打开串口。
- 等待图像区显示图像,如图:
摄像头OV7670代码解析
在这里解析一下OV7670的代码,先看一张代码的流程图:
看几个重要函数:
- OV7670_Init
u8 OV7670_Init(void)
{u16 i=0;u16 reg=0;/* RESET/PWDN引脚初始化 */OV7670_RST_PW_Init();OV7670_PWDN_L; //POWER ONdelay_ms(100);OV7670_RST_L; //复位OV7670delay_ms(100);OV7670_RST_H; //结束复位 /* SCCB引脚初始化 */SCCB_Init(); //初始化SCCB 的IO口 SCCB_WR_Reg(0X12, 0x80); //软复位OV7670delay_ms(50); reg=SCCB_RD_Reg(0X1c); //读取厂家ID 高八位reg<<=8;reg|=SCCB_RD_Reg(0X1d); //读取厂家ID 低八位if(reg!=OV7670_MID){printf("\r\nMID:%d\r\n",reg);return 1;}reg=SCCB_RD_Reg(0X0a); //读取厂家ID 高八位reg<<=8;reg|=SCCB_RD_Reg(0X0b); //读取厂家ID 低八位if(reg!=OV7670_PID){printf("HID:%d\r\n\r\n",reg);return 2;} //初始化配置 OV7670寄存器,采用QVGA分辨率(320*240) for(i=0;i<sizeof(ov7670_init_reg_tbl)/sizeof(ov7670_init_reg_tbl[0]);i++){SCCB_WR_Reg(ov7670_init_reg_tbl[i][0],ov7670_init_reg_tbl[i][1]);} //裁剪摄像头照片尺寸,参数:起始坐标x、y;长度、高度;裁剪长高不可大于上面设置的分辨率OV7670_Window_Set(PIC_START_X,PIC_START_Y,PIC_WIDTH,PIC_HEIGHT);/* 白平衡设置,默认值0 */OV7670_Light_Mode(0);/* 色度设置,默认值2 */OV7670_Color_Saturation(2);/* 亮度设置,默认值2 */OV7670_Brightness(1);/* 对比度设置,默认值2 */OV7670_Contrast(2);/* DCMI初始化,包括IO口和中断 */My_DCMI_Init();/* DCMI DMA设置,数据指向照片数组camera_buffer */DCMI_DMA_Init((uint32_t)&camera_buffer,sizeof(camera_buffer)/4,DMA_MemoryDataSize_HalfWord,DMA_MemoryInc_Enable);//DCMI DMA return 0x00; //ok
}
- DMA2_Stream1_IRQHandler
void DMA2_Stream1_IRQHandler(void)
{ if(DMA_GetFlagStatus(DMA2_Stream1,DMA_FLAG_TCIF1)==SET)//DMA2_Steam1,传输完成标志{ DMA_Cmd(DMA2_Stream1, DISABLE); DMA_ClearFlag(DMA2_Stream1,DMA_FLAG_TCIF1);//清除传输完成中断/* 摄像头获取照片数据完毕,在这里添加操作代码 *//* 数据获取标志ov_rev_ok置位,在main函数中操作 */ov_rev_ok= 1;datanum++;}
}
注意点
在之前驱动摄像头的过程中,一些驱动难点:
- OV7670接口上的XCLK必须要接,这里用的是STM32F4分频输出MCO1,这里的分频系数要调试好,太高太低都不合适,代码定位在sccb.c的32行RCC_MCO1Config函数;
- OV7670的寄存器要配置正确,一些关于分频的寄存器要特别注意,在文件ov7670config.h中。
- OV7670_Window_Set用来裁剪照片的尺寸,正常的QVGA分辨率320*240,一个数组在STM32F4里放不下,可以用函数裁剪成小一点的尺寸存入数组用来传输数组。
小结:对于驱动摄像头OV7670解释了大概的思路,实际移植过程中会有很多改参数,调试的不过,需要自己对着数据手册耐心探索一下,不过过程不变其中。
接下来就把OV7670移植到家庭IOT监测工程中,将原本RGB565的照片数据转换成bmp数据上传到ONENET平台,达到监测的目的,加油,共勉~