深度相机分类
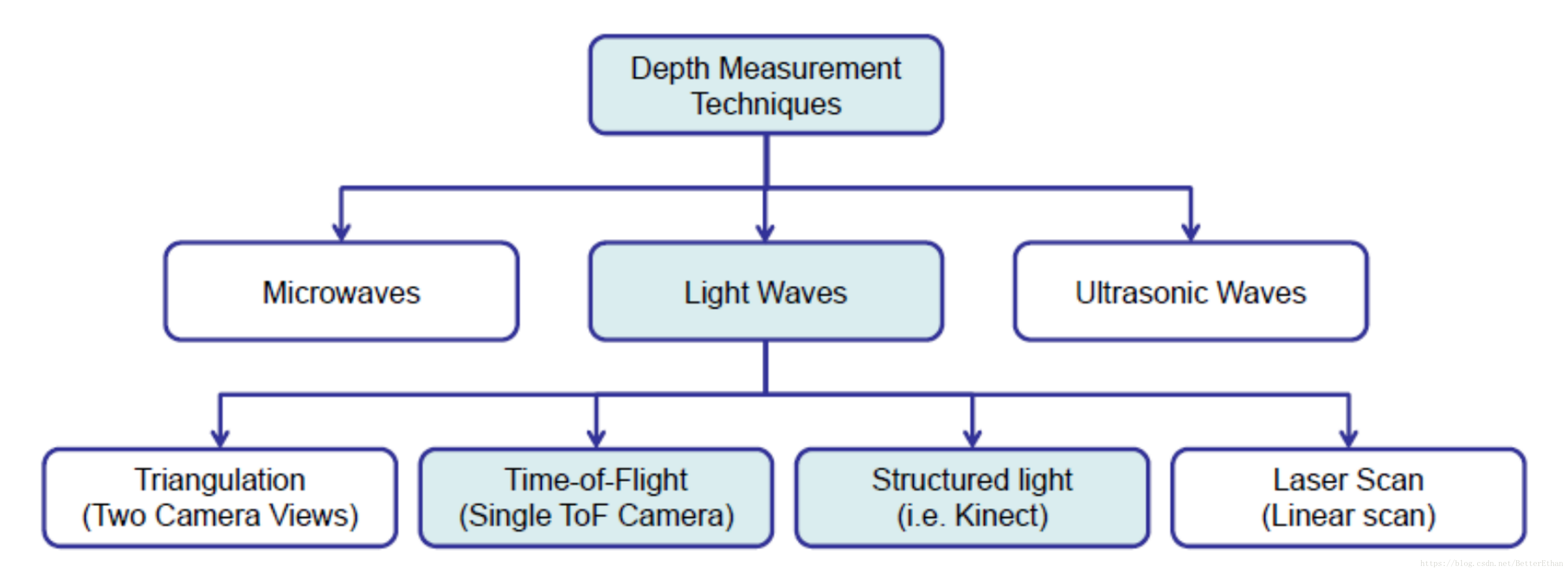
第三行分别为双目摄像头,TOF原理摄像头,结构光摄像头,和激光雷达。
双目摄像头:
有两个摄像头,由两个单目相机组成(两个相机之间的距离叫“基线”是已知的),通过这个基线(进行大量计算并且是不太可靠的)来估计每个像素的空间位置来测量物体与我们之间的距离,克服单目相机无法知道距离的缺点。双目相机测量到的深度范围和基线有关,基线距离越大,能够测量到的就越远。
优点:可用于室内也可用于室外。
缺点:配置与标定较为复杂,其深度和精度受双目的基线或者分辨率所限,并且视差的计算非常消耗计算机资源,在现有的条件下,计算量是双目的主要问题之一。
TOF原理摄像头:
原理:测量发射红外(IR)信号与相位延迟计算每个sensor像素到目标物体的距离
缺点:精确度低、空间分辨率低运动模糊 (motion blur 相机运动或目标运动),无法在阳光下使用
特点: TOF虽然目前精度在厘米级,比Leap Motion等毫米级要低,但目前的设备已经比Leap Motion等更小也更便宜,未来可以做到更小,能够植入移动端。
代表:kinect2
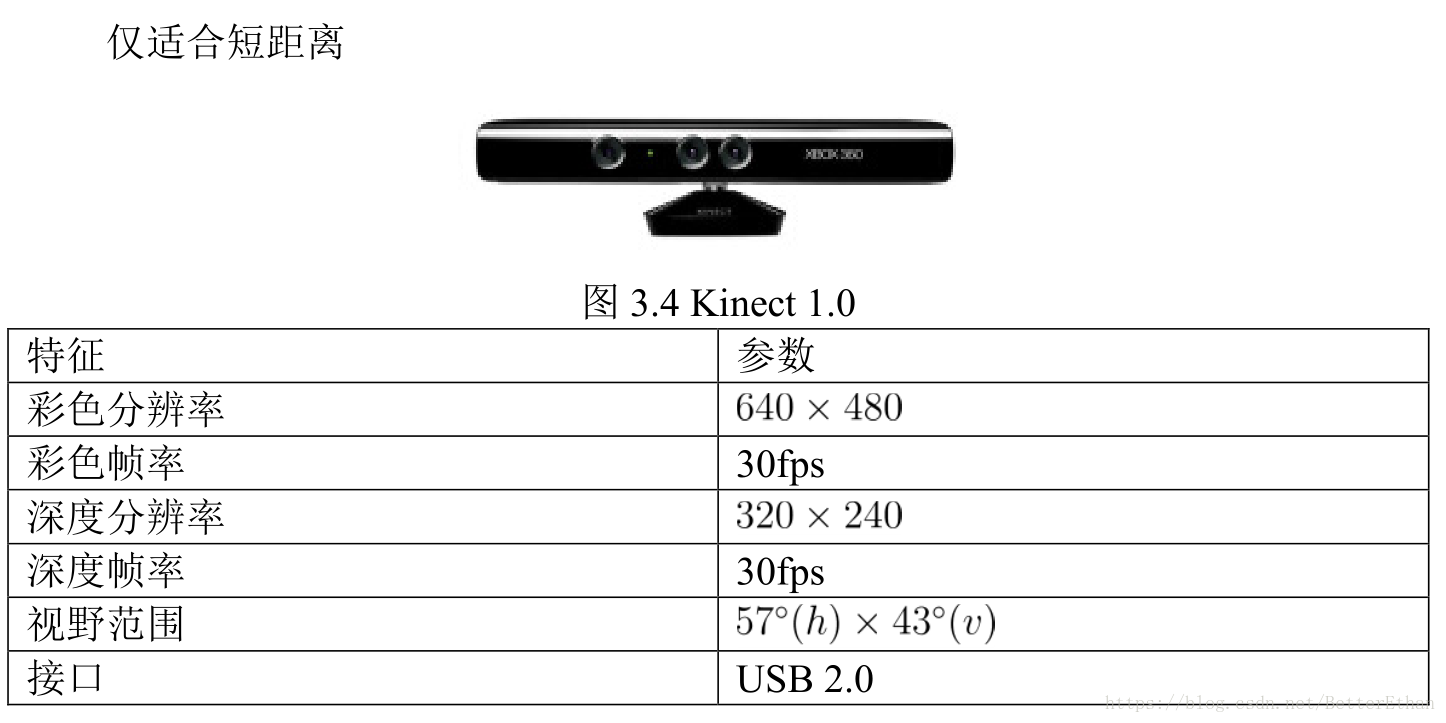
结构光原理摄像头:
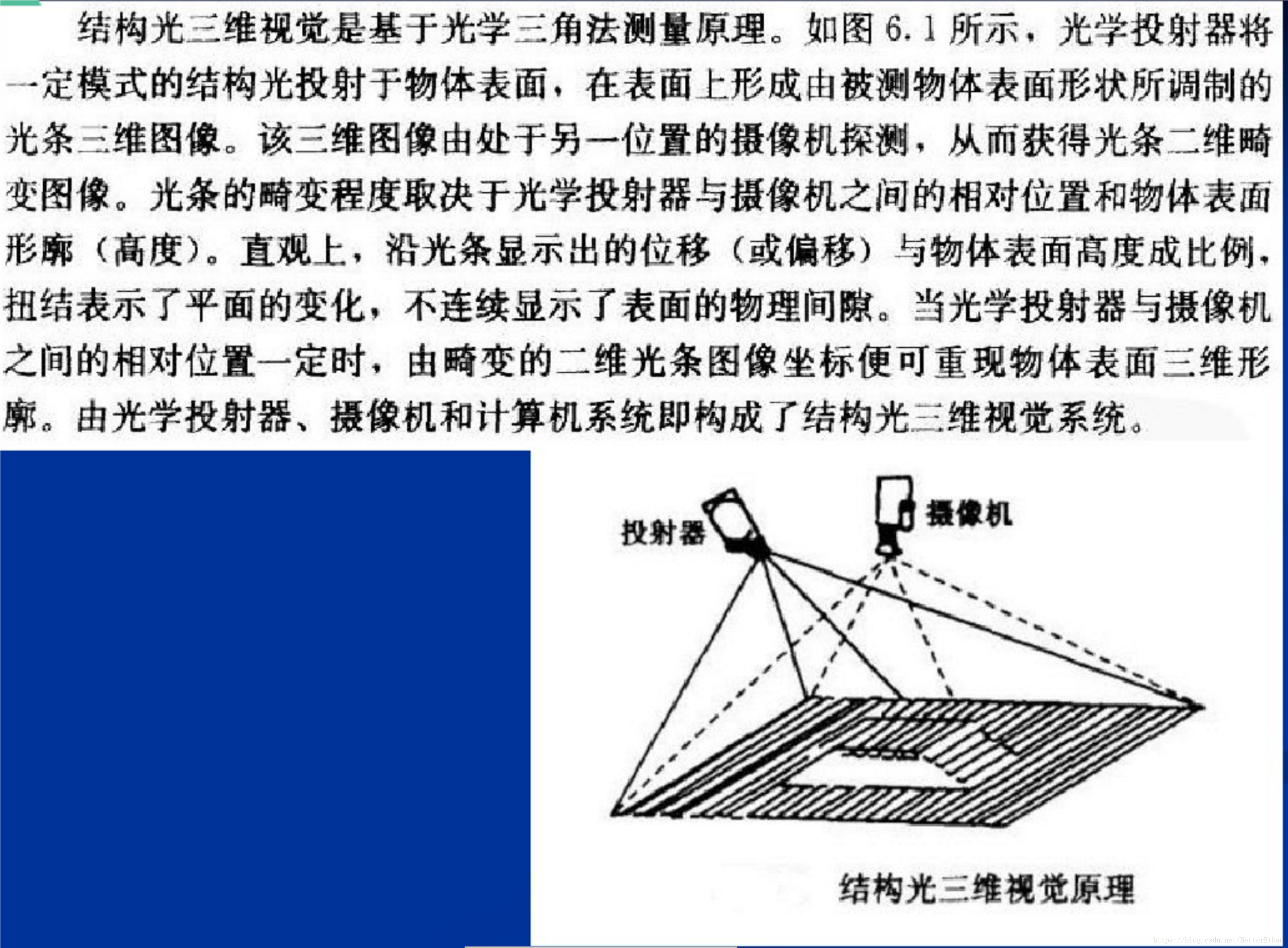
原理:红外光反射时间差
代表:kinect1
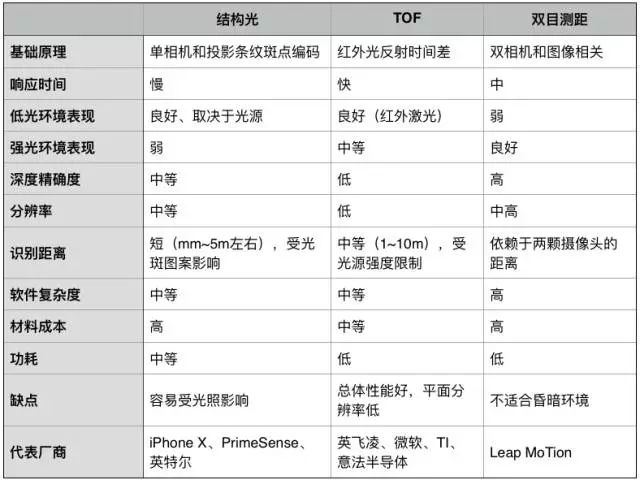
综上用知乎上的一张图进行总结:
自动驾驶摄像头使用情况
下面截图来自《第一本无人驾驶书》:

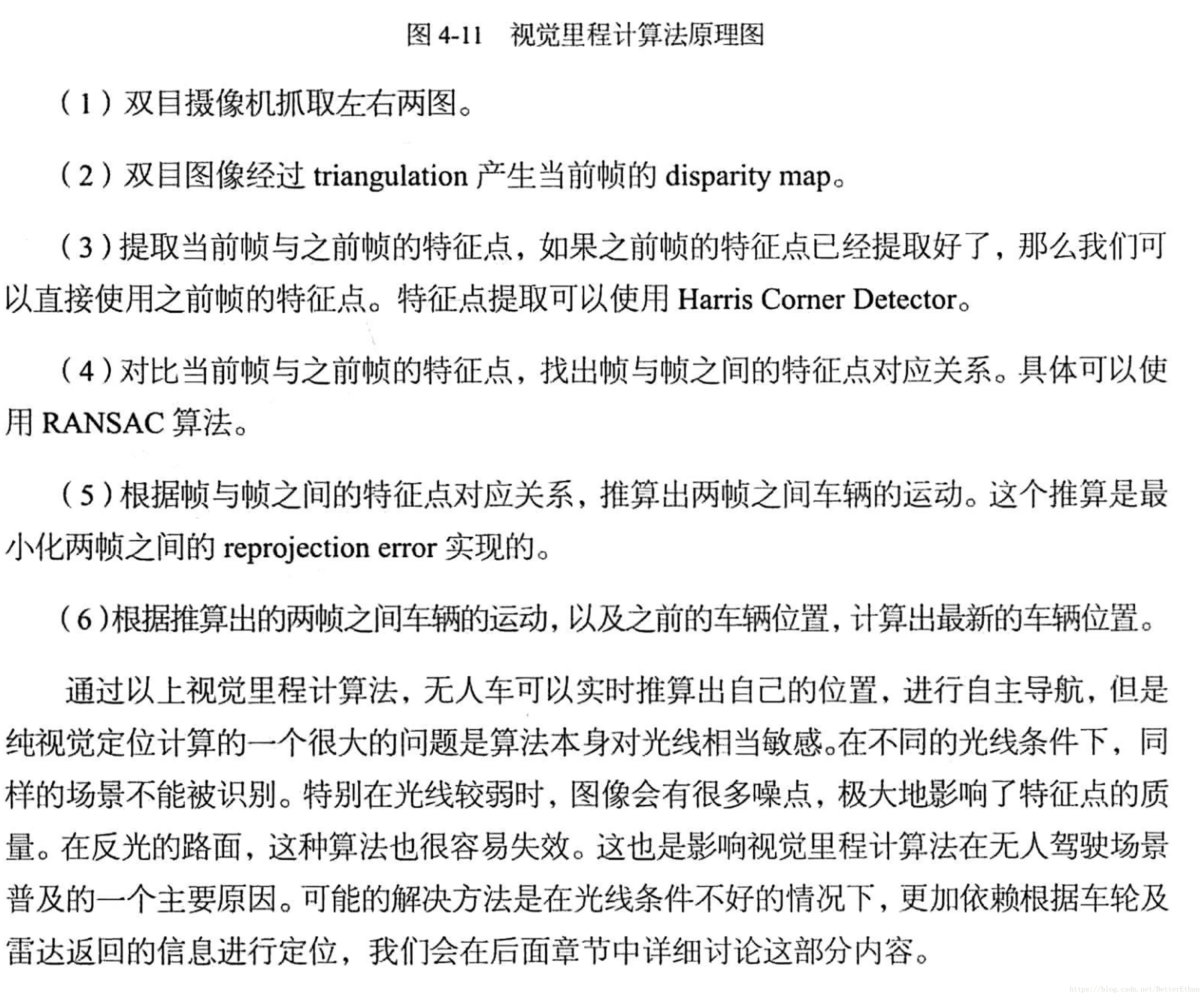
可以看出在自动驾驶行业,作为视觉里程计使用更多是双目摄像头。
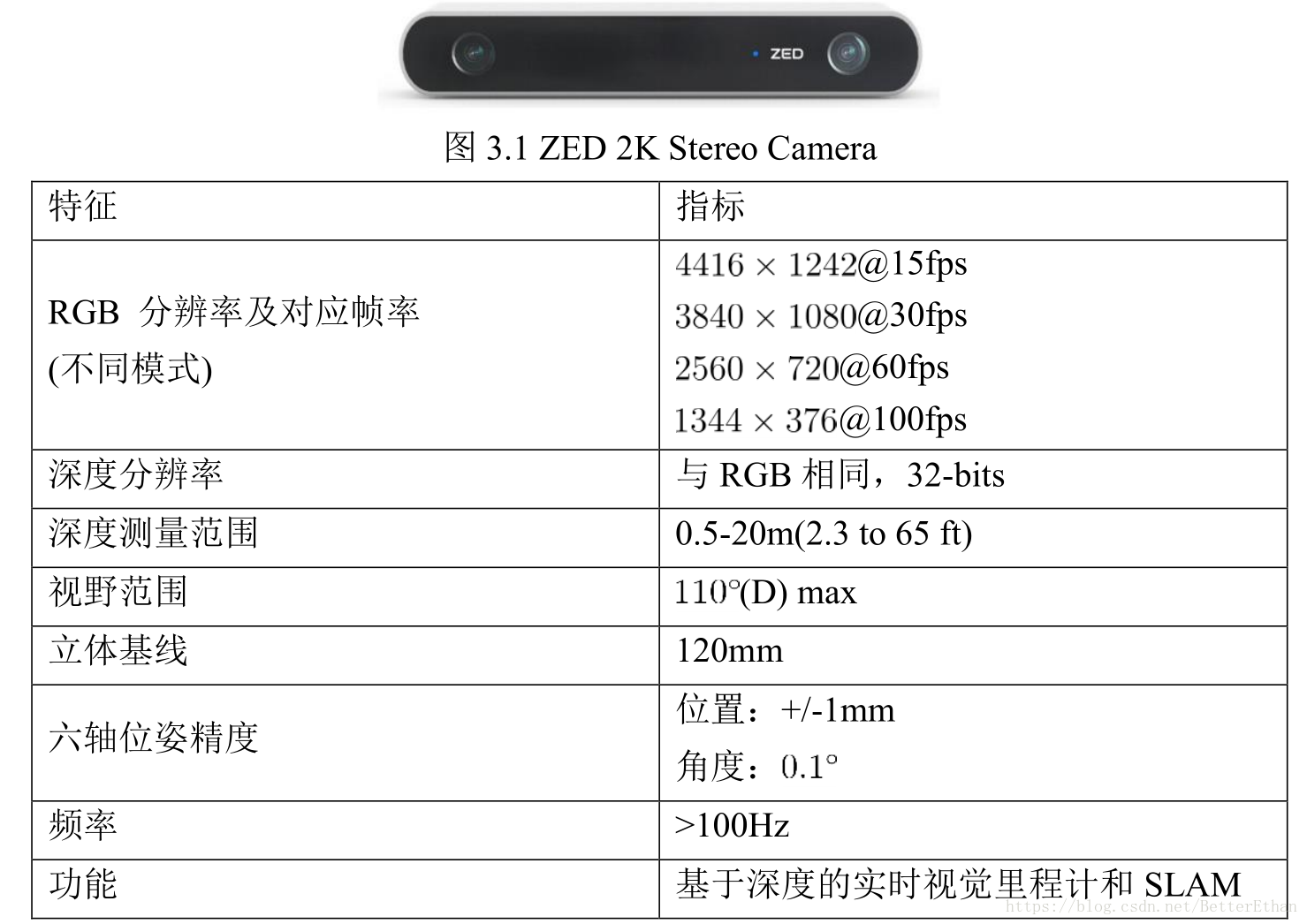
典型相机
双目摄像头:


结构光的深度相机



(8)

由于双目摄像头在户外光照条件下有着良好的效果,但在光照条件很弱的坏境下无法正常使用。我们可以配合TOF摄像头使用,TOF摄像头有着良好的传输速度,处理算法也比双目简单,并且可以正常在夜间使用。综上,作为足式机器人的感知传感器选择,双目摄像头配合TOF摄像头使用是一个不错的选择。
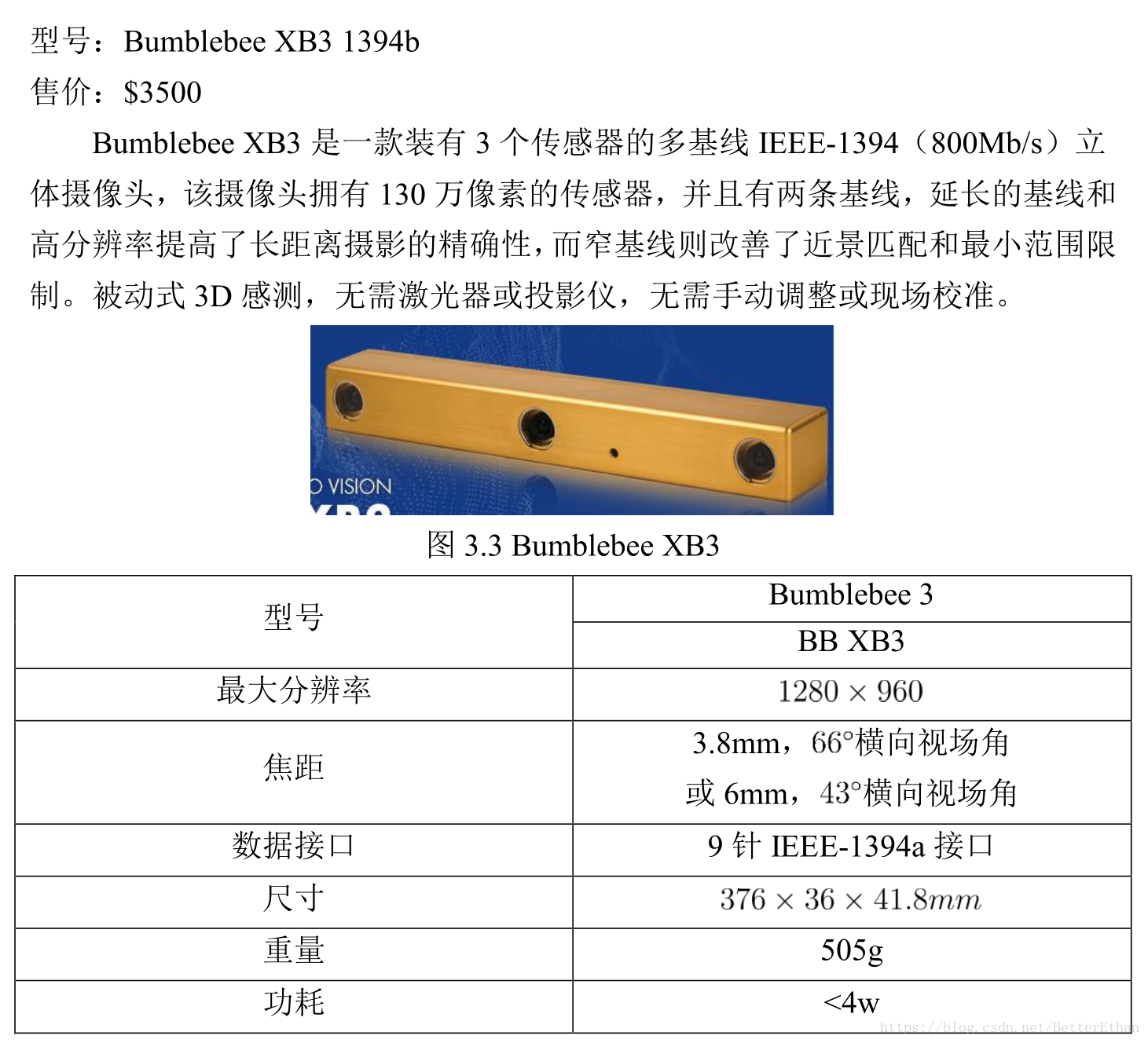
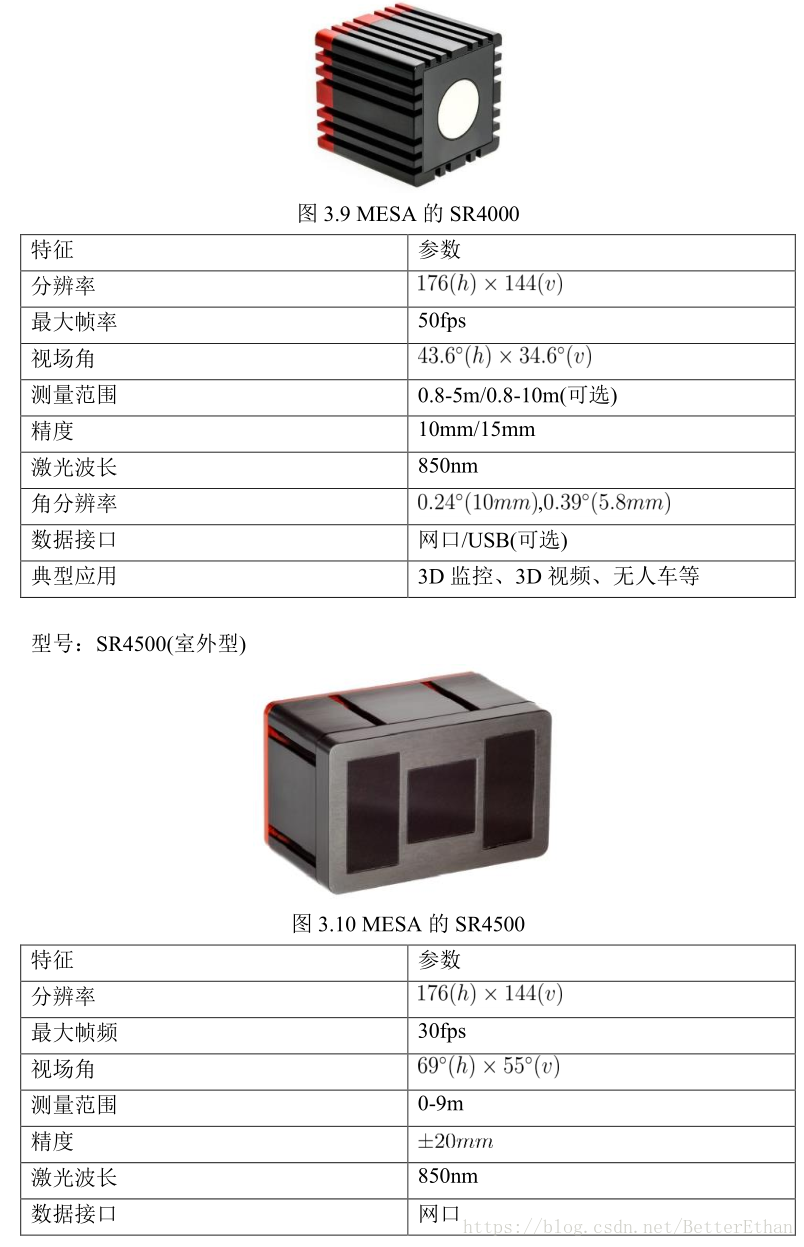
推荐方案:Bumblebee XB3 1394b($3500)与 户内型3D激光测距相机——SR4000(¥11390)


![mt6765和骁龙665哪个好_骁龙450和联发科P22和哪个好?高通骁龙450与MT6762区别对比[多图]...](/images/no-images.jpg)