这段时间从底层软硬件搭好了一辆差速磁导寻迹小车,鉴于一些场地无法铺设磁道,需要别的控制设备给车轮电机驱动器发送运动指令,恰好实验室闲置一个罗技F710游戏手柄,而且该手柄在ROS环境下有相关的包可以调用。后来参考CSDN上两位博主的文章,终于实现小车的遥控控制。具体实现步骤如下:
<1> 安装ROS的joy包 和joystick_driver包,操作码如下:
sudo apt-get install ros-kinetic-joy
sudo apt-get install ros-kinetic-joystick-drivers
<2> 在电脑上插上手柄的USB信号接收器,使用ctr+alt+t打开一个cmd控制台窗口,使用roscore指令激活一个节点管理器master,再打开另一个窗口,输入如下代码,打开joy包的joy节点。
rosrun joy joy_node
可以看到,打开节点后会报一些错误,但是并不影响使用。
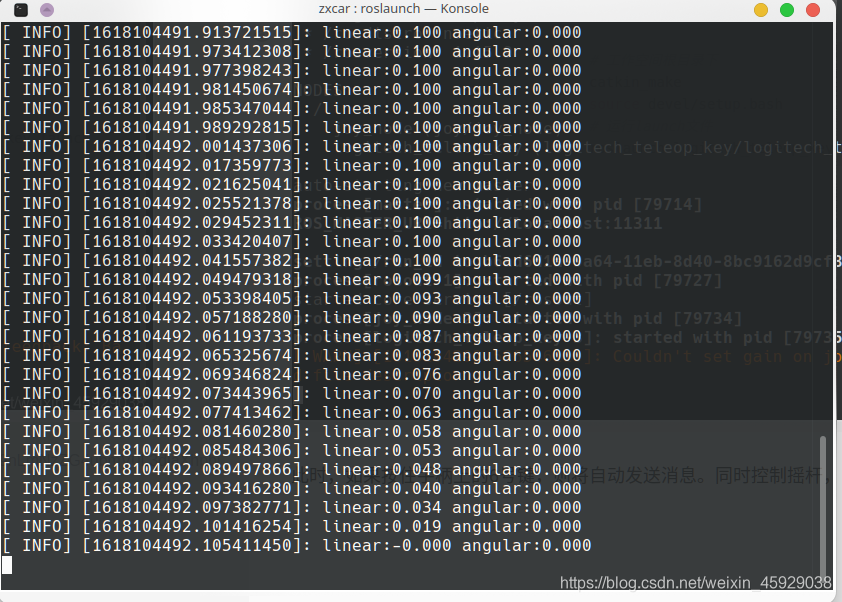
<3> 使用rostopic echo指令打印joy话题的实时数据,手柄的按钮和遥杆每次被操作都会更新数据。
rostopic echo /joy
从上图可以看出,手柄的按钮和摇杆数据被存储在两个数组中:12个元素的buttons数组(int类型)和6个元素的axes数组(float类型),那各数组位对应在手柄上的实际按钮或摇杆位置在哪里呢?经过一番测试,现把正确的按钮和摇杆序号展示如下(注意:网上一些标识是错误的,这个坑我栽过,你们就别再栽进去了)。

特别说明一下:
① 蓝色箭头和数字表示按钮(buttons),红色箭头和数字表示摇杆(axes);
② 按钮按下输出1,不按输出0。蓝色序号10和11按下是按钮,推动是摇杆;
③ 摇杆正推到位输出+1,反推到位输出-1。
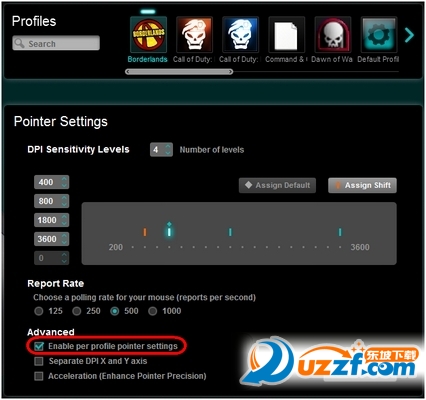
④ 摇杆<2>和<3>可以在+1和-1之间无极调节(精确到小数点后18位),如下图,而其他摇杆只有三种状态输出:+1.0,0.0,-1.0。

<3> 写程序订阅“joy”话题,获取相关buttons和axes的数据,即可将手柄作为控制源,控制小车前行、后退、左转和右转,如果驱动器支持速度模式,还能实现小车的无极调速。如下,附上本项目的手柄控制源码:
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>
#include <sensor_msgs/Joy.h>
#include<iostream>
using namespace std;class Teleop
{
public:Teleop();private:/* data */void callback(const sensor_msgs::Joy::ConstPtr& Joy);ros::NodeHandle n;ros::Subscriber sub ;ros::Publisher pub ;double vlinear,vangular;int axis_ang,axis_lin,ton;
};Teleop::Teleop()
{n.param<int>("axis_linear",axis_lin,3);n.param<int>("axis_angular",axis_ang,2);n.param<double>("vel_linear",vlinear,0.08);n.param<double>("vel_angular",vangular,0.15);n.param<int>("button",ton,5);pub = n.advertise<geometry_msgs::Twist>("/velocity_controller/cmd_vel",1);sub = n.subscribe<sensor_msgs::Joy>("joy",10,&Teleop::callback,this);
}void Teleop::callback(const sensor_msgs::Joy::ConstPtr& Joy)
{geometry_msgs::Twist v;if(Joy->buttons[ton]){v.linear.x =(Joy->axes[axis_lin])*vlinear;v.angular.z = - (Joy->axes[axis_ang])*vangular;ROS_INFO("linear:%.3lf angular:%.3lf",v.linear.x,v.angular.z);pub.publish(v);}
}int main(int argc,char** argv)
{ros::init(argc, argv, "joy");Teleop telelog;ros::spin();return 0;
}
"/velocity_controller/cmd_vel"是本项目小车驱动器的速度接收话题,速度指令经过计算后 pub到这个话题中,驱动器接收指令就可以驱动电机运动。
编译后,先运行joy包的joy_node节点,然后启动如上源码编译后的节点,就可以遥控小车了。但需要说明一下,这里做了一个防误操作设定,需要先按下5号按钮,然后再摇动2和3号摇杆,才能控制小车运动。
最后,感谢这两位博主的文章,帮我解决了这个实际控制中遇到的问题。
https://blog.csdn.net/u014587147/article/details/75673110
https://blog.csdn.net/p942005405/article/details/86560145