主要参数:
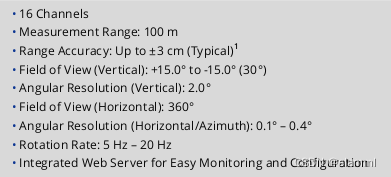
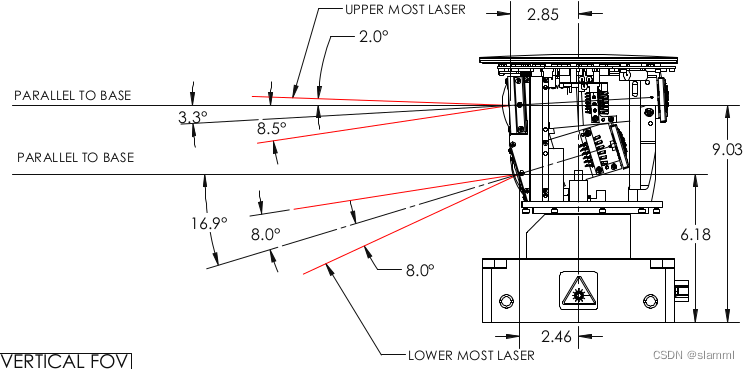
稍微介绍一下,扫描频率越高,短时间可以获取更多数据,在机器人运动速度快的时候可以获取连续性较好的数据,有利于SLAM的实时性;测距范围越广,意味着盲区越少;角度分辨率与两各相邻点云夹角有关,物体距离越远,角度分辨率越低,得到的相邻点云距离就越远,点云就会越稀疏。这里需要注意的一点,对于不同雷达,垂直角分辨率不一定是均匀分布,例如HDL-64E。
测试环境:
Ubuntu16.04+Kinetic
原理简介
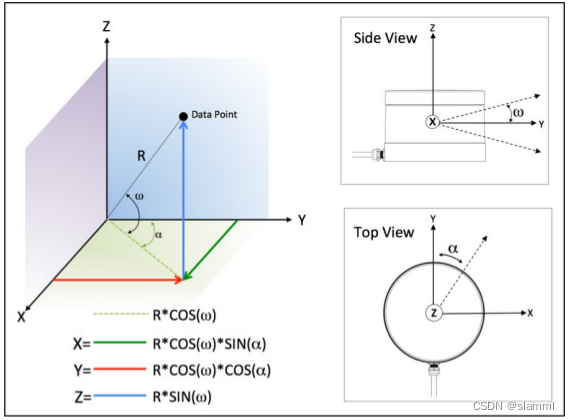
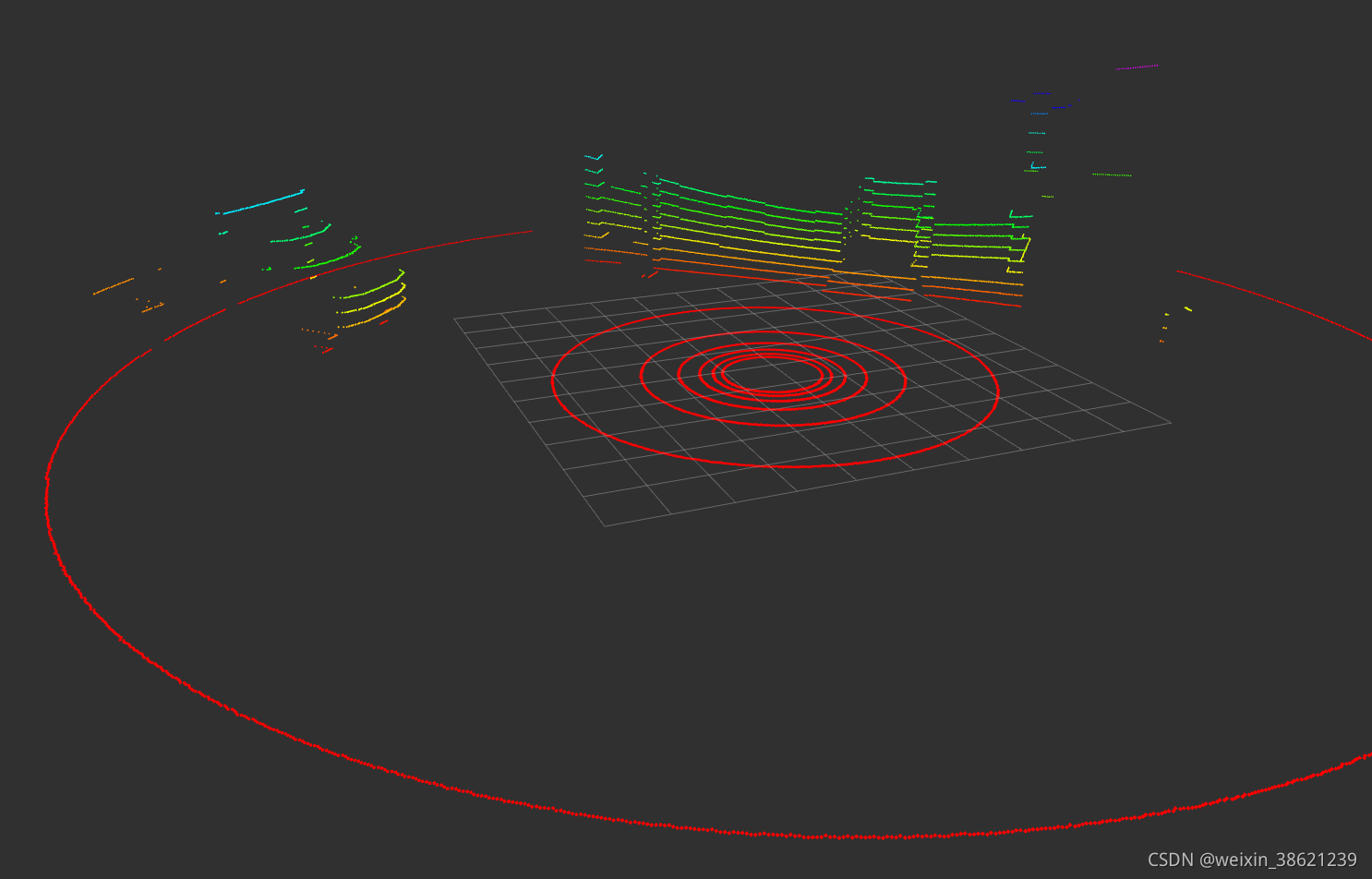
激光雷达,是以发射激光束探测目标的位置等特征量的雷达系统。如图所示,描述了激光雷达解算三维坐标的原理。下面我们将从硬件开始,介绍一下主要的原理。
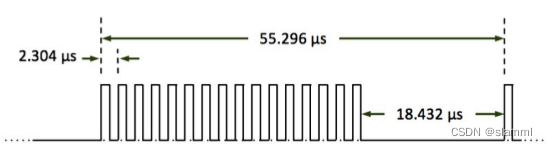
激光雷达首先会按照一定顺序发射激光线束,具体顺序参见表1中的laser_id,垂直方向上是跳跃发射,这样避免邻近的干扰,发射时序参见上图,发射与充电16束激光的周期为55.296us;然后,激光雷达内部马达会按照一定的转速(300-1200 r/min,以60为间隔,通常使用600r/min,对应频率10Hz,对应水平角分辨率0.2度)进行旋转,0.1s旋转1圈获取一帧数据。
| ring id | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| vertiacl angle | − 1 5 ∘ -15^\circ −15∘ | − 1 3 ∘ -13^\circ −13∘ | − 1 1 ∘ -11^\circ −11∘ | − 9 ∘ -9^\circ −9∘ | − 7 ∘ -7^\circ −7∘ | − 5 ∘ -5^\circ −5∘ | − 3 ∘ -3^\circ −3∘ | − 1 ∘ -1^\circ −1∘ | 1 ∘ 1^\circ 1∘ | 3 ∘ 3^\circ 3∘ | 5 ∘ 5^\circ 5∘ | 7 ∘ 7^\circ 7∘ | 9 ∘ 9^\circ 9∘ | 1 1 ∘ 11^\circ 11∘ | 1 3 ∘ 13^\circ 13∘ | 1 5 ∘ 15^\circ 15∘ |
| laser id | 0 | 2 | 4 | 6 | 8 | 10 | 12 | 14 | 1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 |
然后切换到软件层面,我们比较关心的一个问题是数据。那么,旋转1圈得到的数据是怎么定义的呢?激光雷达每次得到"一包数据(data packet,1284bytes)",包含24个发射周期(384个点),具体的数据结构见下文.pcap描述。那么1圈数据是多少数据包呢?用时间计算一下,一圈大概是75.3包。ROS订阅的激光数据是通过velodyne_drive处理之后,收集组包得到的,感兴趣的同学可以看看源程序,里面还有一些数据结构以及处理方法。
参数配置
-
配置主机IP
点击主机网络设置,编辑以太网有线连接;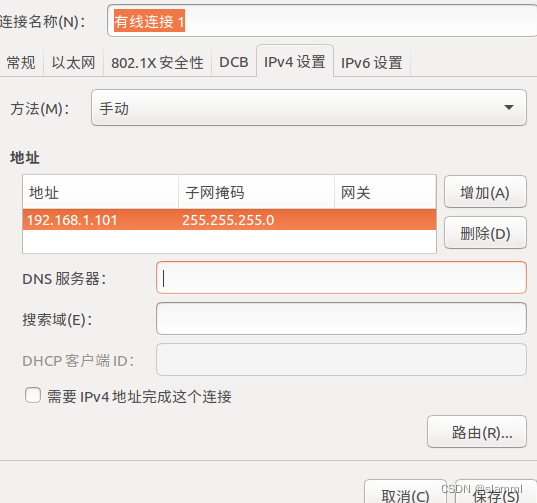
主机IP设置 将IP地址改为与激光雷达同一网段(192.168.1.x),子网掩码为255.255.255.0,注意不要与激光雷达IP冲突,激光雷达的IP为192.168.1.201;
-
配置VLP-16

VLP-16参数配置
使用方法
参考Ros Wiki:http://wiki.ros.org/velodyne
-
安装驱动
sudo apt-get install ros-kinetic-velodyne -
新建ROS工程
mkdir -p data_velodyne/src cd data_velodyne/src git clone https://github.com/ros-drivers/velodyne.git rosdep install --from-paths src --ignore-src --rosdistro kinetic -y #安装工作空间src路径下所有功能包的依赖项 cd .. catkin_make_isolated --install source ~/data_velodyne/devel_isolated/setup.bash -
启动采集程序
roscore roslaunch velodyne_pointcloud VLP16_points.launch -
记录数据包
rosbag record -o /data_velodyne/bags/data_velodyne /velodyne_points -
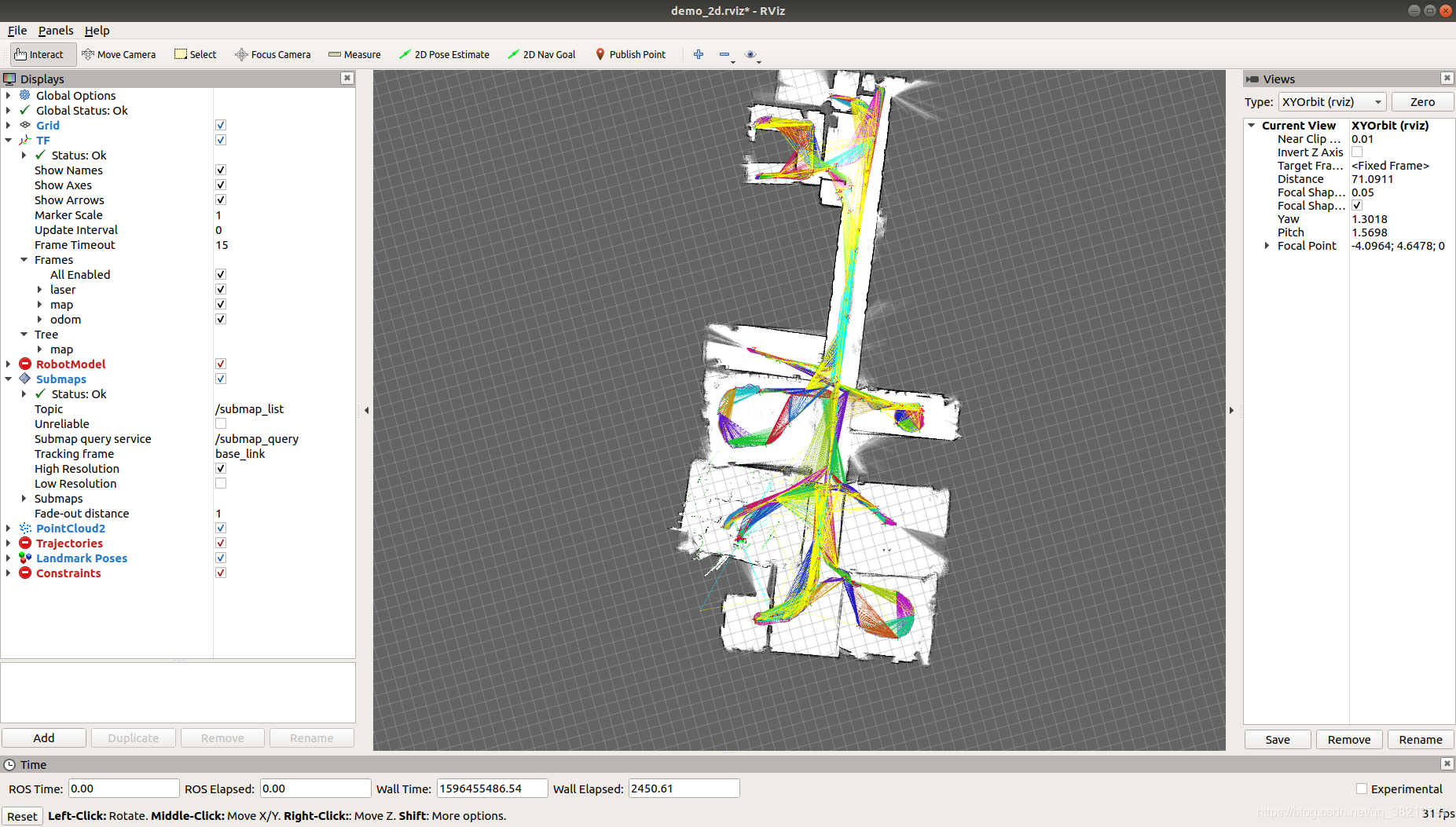
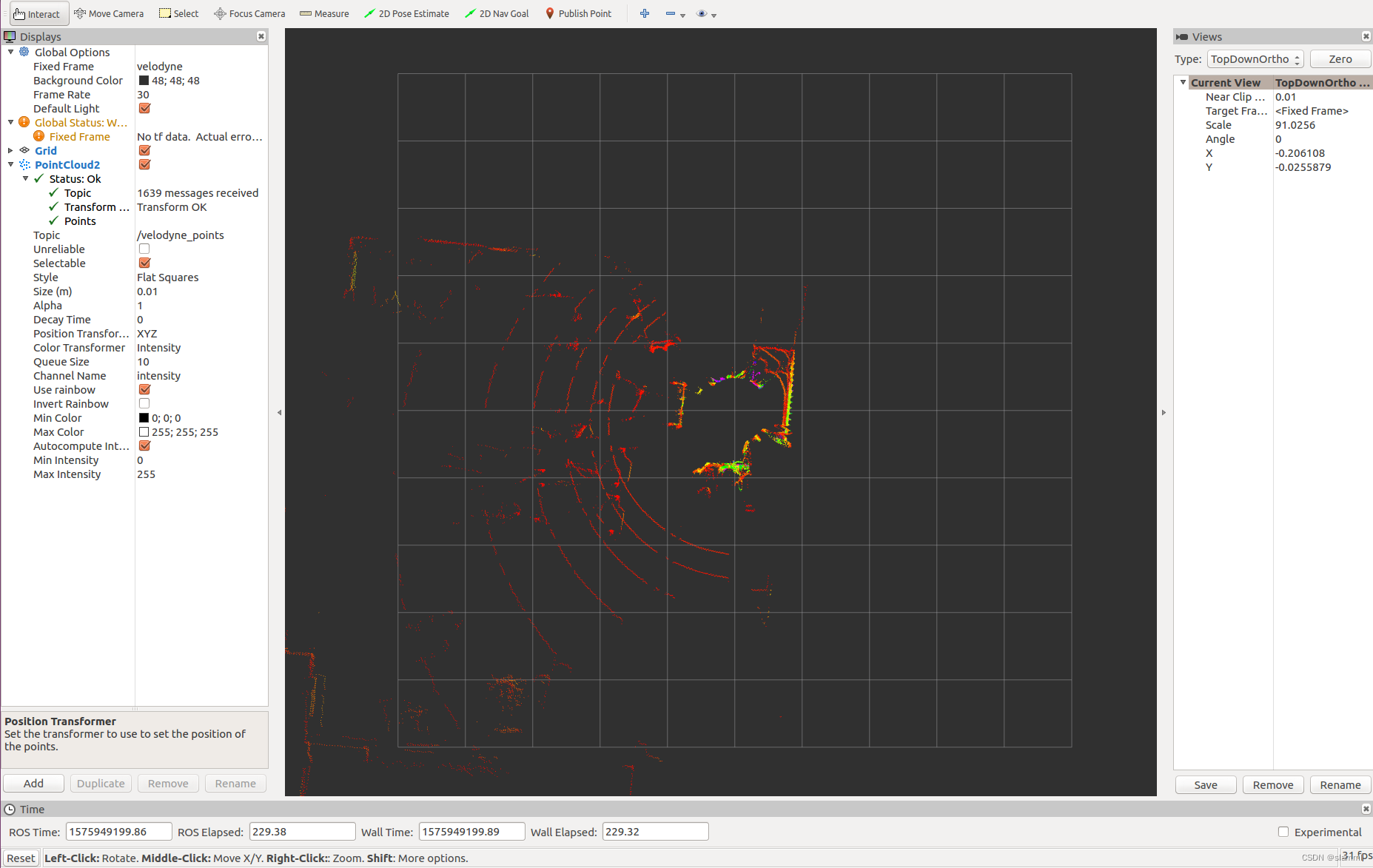
可视化(rviz)
rosrun rviz rviz -f velodyne在rviz中Add PointCloud2,输入topic /velodyne_points订阅话题信息;
最后,自己借助shell脚本封装程序,实现一键采集并录制数据,源码如下:
data_velodyne
数据格式
-
.pcap(原始数据格式)
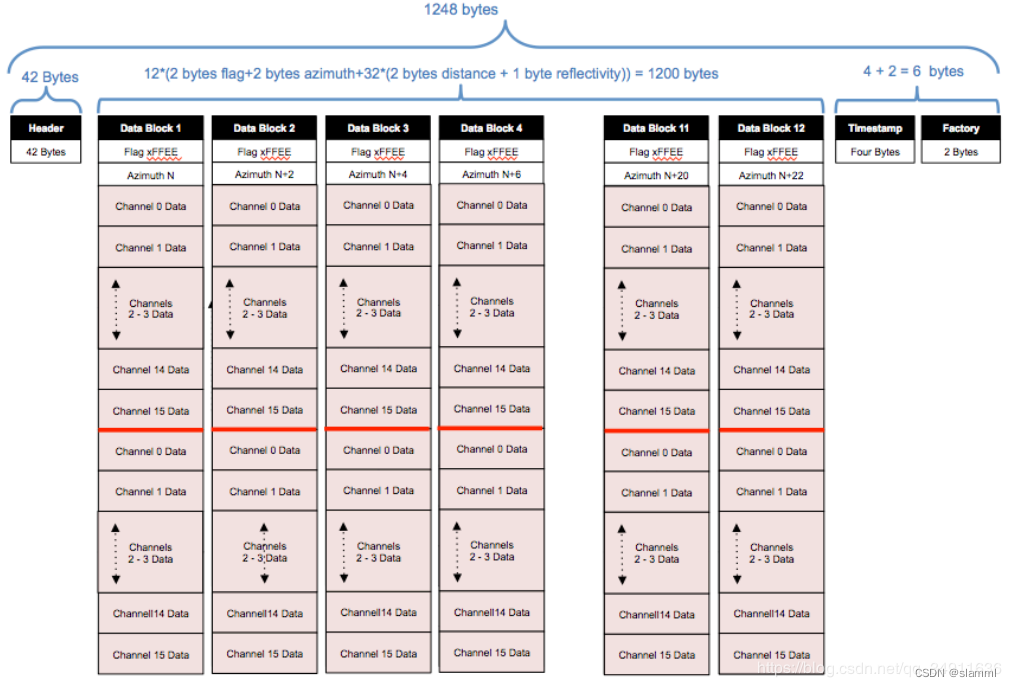
激光雷达数据帧 pcap文件是常用的数据包存储格式,总体结构是文件头-数据包头1-数据包1-数据包头2-数据包2…,作为velodyne专用的数据格式,解析较为麻烦,一般在程序设计中都会采用其他格式。如上图所示,每一帧的数据长度固定为1248字节,包括前42字节的数据包标识、12组数据包、4字节时间戳和最后两字节雷达型号参数;12组数据包中前两字节为数据包的开始标识(0xFFEE)、接下去两字节为当前旋转角度值和连续32x(2字节的距离值+1字节的激光反射强度值)字节的距离信息,其中32x3 字节分别为雷达两次获取探测信息,每个数据包开头所携带的旋转角度是指当前数据包前16x3字节对应的角度,而后16x3字节对应的旋转角度激光雷达没有直接给出,需要通过计算前后两次旋转角度然后求取平均值获得。
-
.txt/.xyz/.pts/.csv(ASCII)
读写方便,但是数据读取较慢且占用大量空间,对海量点云数据的存储和处理较困难。X Y Z R G B ... -
.las
由美国摄影测量与遥感协会提出,目前通用的点云数据格式,开放的二进制数据格式,只能用存储空间相对较小,但读写需要专业软件。 -
.pcd
Point Cloud Library定义格式,包含文件头及点云数据。# .PCD v.7 - Point Cloud Data file format VERSION .7 #指定pcd文件版本 FIELDS x y z rgb #维度与字段 SIZE 4 4 4 4 #各字段字节大小 TYPE F F F F #字段类型 COUNT 1 1 1 1 #各维度包含元素数目 WIDTH 213 #点云数据集宽度 HEIGHT 1 #点云数据集高度 VIEWPOINT 0 0 0 1 0 0 0 #点云的获取视点 POINTS 213 #点云总数 DATA ascii #数据类型 0.93773 0.33763 0 4.2108e+06 #点数据 0.90805 0.35641 0 4.2108e+06 -
ROS中的消息格式
-
sensor_msgs/LaserScan
# 测量的激光扫描角度,逆时针为正 # 设备坐标帧的0度面向前(沿着X轴方向)Header header float32 angle_min # scan的开始角度 [弧度] float32 angle_max # scan的结束角度 [弧度] float32 angle_increment # 测量的角度间的距离 [弧度] float32 time_increment # 测量间的时间 [秒] float32 scan_time # 扫描间的时间 [秒] float32 range_min # 最小的测量距离 [米] float32 range_max # 最大的测量距离 [米] float32[] ranges # 测量的距离数据 [米] (注意: 值 < range_min 或 > range_max 应当被丢弃) float32[] intensities # 强度数据 [device-specific units] -
sensor_msgs/PointCloud
#This message holds a collection of 3d points, plus optional additional information about each point. #Each Point32 should be interpreted as a 3d point in the frame given in the header Header header geometry_msgs/Point32[] points #Array of 3d points ChannelFloat32[] channels #Each channel should have the same number of elements as points array, and the data in each channel should correspond 1:1 with each point在结合ROS使用的时候,我们常常将数据记录到.bag文件中,若需要其他格式的点云,我们可以进行对应的转换,例如需要.pcd格式的点云文件,则运行以下命令即可:
rosrun pcl_ros bag_to_pcd data_velodyne.bag /velodyne_points pcds这样,转换出来的pcd文件就会存到指定的目录下。
-
参考资料
[1]. Velodyne VLP-16
[2]. velodyne_driver
[3]. velodyne VLP-16线激光雷达驱动程序、相位锁、时钟同步测试总结
[4]. Velodyne VLP-16激光雷达数据格式解析
[5]. velodyne:激光雷达pcap文件格式及写入、数据解析
[6]. PointXYZIR


![[激光原理与应用-24]:《激光原理与技术》-10- 激光产生技术-调Q技术、Q开关、Q驱动器](https://img-blog.csdnimg.cn/1d5c7f5ed7574fed95d1b27d3be08f1f.png)