http://www.52rd.com/S_TXT/2015_3/TXT65233.HTM
多轴飞行器无人机硬件技术细谈
52RD.com 2015年3月6日 电子工程专辑 参与:2人 我来说两句 在今年CES上无人机成为了展会最大的热点之一,大疆(DJI)、Parrot、3D Robotics、AirDog等知名无人机公司都有展示他们的最新产品。甚至是英特尔、高通的展位上展出了通信功能强大、能够自动避开障碍物的飞行器。无人机在2015年已经迅速地成为现象级的热门产品,甚至我们之前都没有来得及细细研究它。为此,本刊特别采访了多家公司,来了解无人机的硬件结构以及它今后的技术发展趋势。(注:本篇文章中的无人机,也特指多轴飞行器(Drone)这一类产品。)
与固定翼无人机相比,多轴飞行器的飞行更加稳定,能在空中悬停。主机的硬件结构如图1。
图1:四轴飞行器系统解析图
标准的遥控器的结构图如图2。
图2:遥控器系统解析图
以上只是标准产品的解剖图,有些更加高级的如针对航模发烧友和航拍用户们的无人机系统,还会要求有云台、摄像头、视频传输系统以及视频接收等更多模块。
在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。
图3:意法半导体高级市场工程师任远
意法半导体高级市场工程师任远介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制,意法半导体的STM32F051以及STM32F301系列因其高集成度,小封装以及超值的性价比被业界广泛采用。在飞机姿态控制方面,根据外部传感器的不同,意法半导体可以提供STM32F0/STM32F3/STM32F4不同的系列对应客户的需求。云台控制方面,STM32F301/STM32F302/STM32F405等系列也已经广泛应用于客户的航拍产品当中。另外,在遥控器方面,除了STM32F0/STM32F1系列应用于传统的不带显示的类型之外,STM32F429由于内置TFT彩屏驱动也正在逐渐用在带彩屏显示的遥控器当中。
新唐的MCU负责人表示: 多轴飞行器由遥控, 飞控,动力系统, 航拍等不同模块构成, 根据不同等级产品的需求, 从8051, Cortex-M0, Cortex-M4到ARM9的不同CPU内核, 新唐科技已有多款 MCU 被应用在多轴飞行器:例如小四轴的飞行主控, 因功能单纯, 体积小, 必须同时整合遥控接收, 飞行控制及动力驱动功能, 采用QFN33或TSOP20 封装的Cortex-M0 MINI54系列;中高阶多轴飞行器则采用内建 DSP 及浮点运算单元的Cortex-M4 M451系列, 负责飞行主控功能,驱动无刷电机的电调(ESC)板则采用MINI5系列设计。低阶遥控器使用 SOP20 封装的4T 8051 N79E814;中高阶遥控器则采用Cortex-M0 M051系列。另外, 内建ARM9及H.264视频边译码器的N329系列SOC则应用于2.4G及5.8G的航拍系统。
在飞控主板上,目前控制和处理用得最多的还是MCU而不是CPU。由于对于飞行控制方面主要都是浮点运算,简单的ARM Cortex-M4内核32位MCU都可以很好的满足。有的传感器MEMS芯片中已经集成了DSP,与之搭配的话,更加简单的8位单片机也可以做到。
丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。
例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了“RealSense”技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特尔的“RealSense”3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。
图4:XMOS公司市场营销和业务拓展副总裁Paul Neil博士
此外,活跃在在机器人市场的欧洲处理器厂商XMOS也表示已经进入到无人机领域。XMOS公司市场营销和业务拓展副总裁Paul Neil博士表示,XMOS的xCORE多核微控制器系列已被一些无人机/多轴飞行器的OEM客户采用。在这些系统中,XMOS多核微控制器既用于飞行控制也用于MCU内部通信。
Paul Neil说:xCORE多核微控制器拥有数量在8到32个之间的、频率高达500MHz 的32位RISC内核。xCORE器件也带有Hardware Response I/O接口,它们可提供卓越的硬件实时I/O性能,同时伴随很低的延迟。“这种多核解决方案支持完全独立地执行系统控制与通信任务,不产生任何实时操作系统(RTOS)开销。xCORE微控制器的硬件实时性能使得我们的客户能够实现非常精确的控制算法,同时在系统内无抖动。xCORE多核微控制器的这些优点,正是吸引诸如无人机/多轴飞行器这样的高可靠性、高实时性应用用户的关键之处。”
意法半导体也透露,STM32F7系列采用最新一代Cortex-M7架构,集高性能、实时功能、数字信号处理、高集成度,为有高精度控制的飞行器客户提供解决方法。STM32 Dynamic Efficiency(动态效率)微控制器系列在动态功耗与处理性能之间取得完美平衡,使飞行器设计更加完美。
多轴飞行器需要用到四至六颗无刷电机(马达),用来驱动无人机的旋翼。而马达驱动控制器就是用来控制无人机的速度与方向。原则上一颗马达需要配置一颗8位MCU来做控制,但笔者也有看到一颗MCU控制多个BLDC马达的方案。
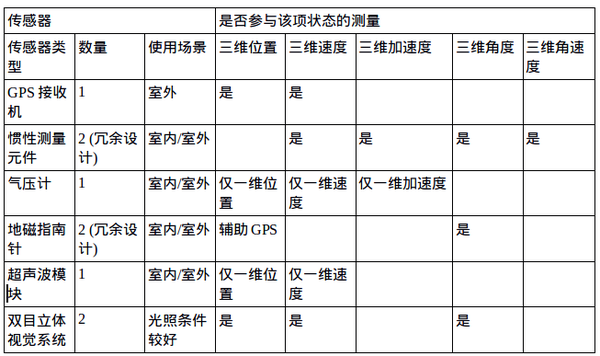
多轴无人机的EMS/传感器
无人机方案商深圳富微科创电子有限公司总经理陈一民认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。
图5:ADI亚太区微机电产品市场和应用经理赵延辉
ADI亚太区微机电产品市场和应用经理赵延辉介绍,ADI的工业级陀螺仪ADXRS652、 ADXRS620、ADXRS623、ADXRS646、ADXRS642等和工业级加速度计ADXL203、 ADXL278等被广泛用于专业级的航拍设备上。而商业级的加速度计ADXL335、ADXL326、 ADXL350、ADXL345等,也一直被广泛应用于一体机及各种飞行器中。
这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化后,就可以控制电机向相反的方向转动,进而达到稳定的效果。这是一个典型的闭环控制系统。至于用MEMS传感器测量角度变化,一般要选择组合传感器,既不能单纯依赖加速度计,也不能单纯依赖陀螺仪,这是因为每种传感器都有一定的局限性。比如说陀螺仪输出的是角速度,要通过积分才能获得角度,但是即使在零输入状态时,陀螺依然是有输出的,它的输出是白噪声和慢变随机函数的叠加,受此影响,在积分的过程中,必然会引进累计误差,积分时间越长,误差就越大。这就需要加速度计来校正陀螺仪,因为加速度计可以利用力的分解原理,通过重力加速度在不同轴向上的分量来判断倾角。由于没有积分误差,所以加速度计在相对静止的条件下可以校正陀螺仪的误差。但在运动状态下,加速度计输出的可信度就要下降,因为它测量的是重力和外力的合力。较常见的算法就是利用互补滤波,结合加速度计和陀螺仪的输出来算出角度变化。
赵延辉表示,ADI产品主要的优势就是在各种恶劣条件下,均可获得高精度的输出。以陀螺仪为例,它的理想输出是只响应角速度变化,但实际上受设计和工艺的限制,陀螺对加速度也是敏感的,就是我们在陀螺仪数据手册上常见的deg/sec/g的指标。对于多轴飞行器的应用来说,这个指标尤为重要,因为飞行器中的马达一般会带来较强烈的振动,一旦减震控制不好,就会在飞行过程中产生很大的加速度,那势必会带来陀螺输出的变化,进而引起角度变化,马达就会误动作,最后给终端用户的直观感觉就是飞行器并不平稳。除此之外,在某些情况下,如果飞行器突然转弯,可能会造成输入转速超过陀螺仪的测试量程,理想情况下,陀螺仪的输出应该是饱和输出,待转速恢复到陀螺仪量程范围后,陀螺仪再正确反应实时的角速度变化,但有些陀螺仪确不是这样,一旦输入超过量程,陀螺便会产生震荡输出,给出完全错误的角速度。还有某些情况下,飞行器会受到较大的加速度冲击,理想情况陀螺仪要尽量抑制这种冲击,ADI的陀螺仪在设计的时候,也充分考虑到这种情况,利用双核和四核的机械结构,采用差分输出的原理来抑制这种“共模”的冲击,准确测量“差模”的角速度变化。但某些陀螺仪在这种情况下会产生非常大错误输出,甚至是产生震荡输出。
“对于飞行器来说,最重要的一点就是安全,无论它的硬件设计还是软件设计,都要首先保证安全,而后才是极致的用户体验。ADI的MEMS传感器设计理念恰好跟此想吻合,我们的MEMS传感器首先是保证在各种极端条件下的稳定性,而后才是追求极致的指标。根据客户实测反馈,在飞行器误操作,不小心掉落后,ADI的陀螺仪输出基本不会受任何影响,而其它某些陀螺仪会出现非常大零点偏移。ADI的加速度计在受到冲击后,也不会产生任何可靠性问题,而其它某些加速度计则会以很大概率出现完全没有输出的现象。这些用户实测出来的差异,都是得益于ADI MEMS传感器在设计时对各种极端情况的充分考虑。”赵延辉说。
“未来飞行器上的MEMS产品也会向集成化方向发展,比如3轴加速度加上3轴陀螺仪的集成产品,甚至是SOC,把处理器也集成进去,直接提供角度输出供后端处理器调用。由于飞行器的应用场景一般都是户外,客户势必会做全温范围内的温度补偿,而在出厂前就对MEMS产品做好了全温范围内的温补,或者是设计超级低温漂的传感器,都会是MEMS产品在这一领域的发展方向。当然可靠性依然是最重要的指标。”他认为。
陈一民认为,随着无人机的功能不断增加,GPS传感器、红外传感器、气压传感器、超声波传感器越来越多地被用到无人机上。方案商已经在利用红外和超声波传感器来开发出可自动避撞的无人机,以满足将来相关法规的要求。集成了GPS传感器的无人机则可以实现一键返航功能,防止无人机飞行丢失。而内置了GPS功能的无人机,可以在软件中设置接近机场或航空限制的敏感地点,不让飞机起飞。
无线控制与视频传输
作为娱乐级的无人机,可能只需要用到传输的遥控技术,2.4GHz或5.8GHz的无线遥控都可以满足。虽然433MHz频段穿透性强,通讯距离远,可以最远传输达2公里,但由于其抗干扰能力弱,遥控无人机或飞行器上都不太采用。2.4GHz或5.8GHz的无线射频芯片有很多家芯片厂商都可以提供,一直以来都为遥控玩具厂商采用,可供选择的芯片较多。
图7:合泰半导体产品技术开发处/马达产品技术部专案处长潘健章
多轴无人机由于可以非常稳定的飞行,在装戴云台和相机后,可以在高空中拍摄视频,并通过无线通信(5.8G、WIFI或LTE)即时传输到地面,其用途更加广泛。合泰半导体产品技术开发处/马达产品技术部专案处长潘健章认为,四轴航拍飞行器已经从少数的用途(交通监控、大气监控、城市规划、边境巡防、灾情监视、监测农业庄稼生长与病虫害情况、精准喷洒农药、边疆巡航、城市反恐等),开始走向大众消费者(航拍),成为一款智能硬件商品。
目前博通公司的Wi-Fi和蓝牙组合芯片已广泛应用于无人机上,在控制信号传输和视频传输上均有涉猎。应用于无人机上的WLAN芯片主要特性为同时维护视频信道和控制信道的可靠性和稳定性。这些芯片拥有先进的接收架构、高接收灵敏度,以及各种先进的信道管理能力,其中就包括针对高速和抗噪连接的MIMO和双频技术。“博通的WICED 开发套件支持Linux,Android和基于RTOS设计的操作系统,”博通公司无线连接组合事业部产品营销高级总监Brian Bedrosia说。
在无人机的视频传输方面,深圳大疆DJI无人机早就是航拍无人机市场的领导者。他们可以无线传输1080P高清视频,这是其它众多国内娱乐无人机厂商目前没有解决的问题。一般的做法是在云台搭载相机,高空拍摄再飞回地面检查。这种方式由于不能即时看到拍摄画面,所以还不能满足航拍的要求。陈一民介绍,目前有不少方案是采用5.8GHz频段传输模拟视频到地面,最远距离能达600多米。但这种方式需要在飞行器上将高清(1080P或4K)转码成720P,再转成数字信号传输到遥控器显示屏上,技术上也较复杂,并且画面会有马赛克、停顿或卡死。画面质量也不够好,用到专业航拍还有距离,适合普通爱好者娱乐。
图6:博通公司无线连接组合事业部产品营销高级总监Brian Bedrosian
目前专业WiFi芯片厂商还没有开发出这种远距离无线高清视频传输的芯片,包括博通与高通都没有。但是无人机市场如此火热,无线芯片厂商已经在着手计划推出专用芯片。“未来我们将会看到能同时与控制器和显示器建立链路的双模芯片组,”博通公司 Brian Bedrosian表示。
在专用芯片推出之前,一种采用软件定义无线电的方法解决了无线远距离和高带宽传输的矛盾。在ADI公司的软件定义无线电(SDR)技术问世之前,RF工程师可以通过分立器件去实现远距离高带宽的无线传输,但是方案既复杂成本也很高,开发时间太长,不太适合用于消费类的产品上。
ADI半导体高级客户应用经理章新明介绍,公司的AD9561/64系列集成式RF收发器已经被大量应用到无人机。“AD9561/64拥有高性能2x2I/Q收发器,可以实现 70MHz至6.0GHz可调频率范围,200kHz至56HHz的通道带,可轻松实现无人机的较远距离的高清无线图传。”章新明说,“同时它还可以传输指令,无人机的无线传输可省去2.4GHz的RF收发IC。”
无人机仍将面临的技术难题
虽然无人机前景被一致看好,但事实上无人机仍然还面临很多技术上的难题,包括电池的续航瓶颈、更高效率的旋翼的设计、更远程的控制与通信、以及在软件上如何更方便的操控来普及产品等。这些方面的技术挑战,随着众多公司在无人机上的研发不断投入都有可能解决,但还有一个现实的问题,困扰着无人机,尤其是专业航拍级的无人机厂商。
专业航拍无人机定价动辄高达上万块RMB,同时还搭载高端的相机或摄像机。在使用过程中,哪怕是出现一次故障,造成无人机坠机,都会给消费者带来重大的损失,甚至是地面人员的人身安全。在专业论坛中被发烧友们称为“炸机”的无人机坠机事件不断发生,专业航拍厂家为此最为头痛,主要原因是基本上即使是有事故视频,甚至是飞机“残骸”,技术人员也不能断定事故真正的原因。
无人机制造厂伟力玩具的技术总监翟占超他本人也是一位多年的航模发烧友,他认为“炸机”的原因算归纳起来有两种:一种原因是生产与安装过程中不够好,出现机械方面的问题;另一种是信号与软件算法的问题。
翟占超表示要彻底解决这个无人机飞行器的坠机很难。现在装配的问题比较容易发现和避免的,比如调速器行程不一致,连线不够牢靠,机身震动,结构装配不到位等,这些问题在飞机动作量大时很容易导致失控。最严重的是飞控自身存在的不稳定很可怕,不定时的会出现运算错误,比如由于环境原因造成的磁场错乱、GPS信号弱、遥控器失控以及电池突然没电等。他认为,现在的飞控上需要考虑到以上这些情况下的安全处理。
本文来自:我爱研发网(52RD.com) - R&D大本营
详细出处:http://www.52rd.com/S_TXT/2015_3/TXT65233.HTM