一 . 阿克曼结构前世今生
阿克曼转向动力学:
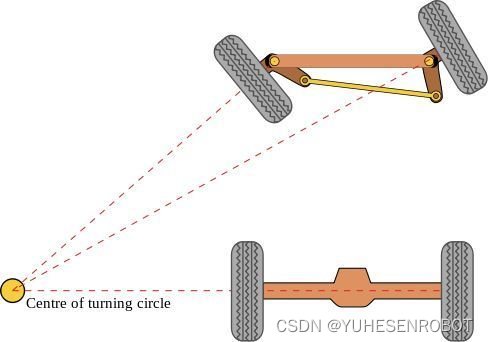
阿克曼结构源于最早源于汽车应用,是汽车上面转向的一种实现方法,在汽车转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎。
这种转向方式最初是由的德国马车工程师的Georg Lankensperger 1817年提出,他的代理商Rudolph Ackerman于1818年在英国申请专利,所以从今往后这个转向原理就叫阿克曼转向几何了。
但是早在他好几十年之前,就有一个叫Erasmus Darwin的人提出了这个想法。
这个Erasmus Darwin是大名鼎鼎进化论的奠基人Charles Darwin的亲爷爷。Erasmus Darwin是英国历史上的一个传奇人物,集医学家、诗人、发明家、植物学家、生理学家等等各种家于一身,被誉为Midlands郡的达芬奇。
在经过剑桥和爱丁堡学习了6年以后,25岁的Darwin开始再伯明翰偏北一点的Lichfiled地区行医,精湛的医术让他名声大振(连英国国王乔治三世都曾延揽他当宫廷医生,被他给直接拒绝了),诗人、发明家、各种家的多重身份让他成为了伯明翰启蒙运动“满月会”(The Lunar Society of Birmingham)的核心人物,他们满月会朋友圈里还有一位叫James Watt, 你没有猜错,就是那个改良蒸汽机并引领了工业革命的瓦特。
我们的一代名医达尔文先生当然是使用马车行驶在救死扶伤的路上,就是类似于下图这种:

每年一万多英里的行程让他很快发现了这种马车的转向方式问题:
(1) 因为要绕着中间一根单一的轴转弯,前轮不能做大,这样在路上碰到石头或其它障碍的时候前轮就容易被抬起来
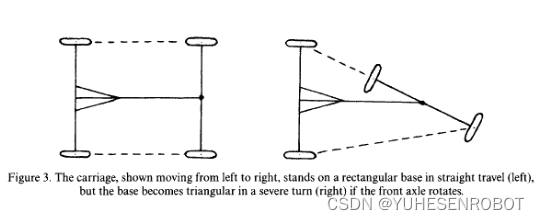
(2) 因为两个前轮是平行的,转弯过头的时候容易出现四个轮子在同一个平面内构成一个三角形的情况,这种情况车子是最“稳定”的,根本就会卡死不动。
于是我们发明家达尔文先生就开始想办法对他的马车进行了改造,之后,车辆试验认证工程师又开始默默地进行道路试验起来。直到1766年,在他写给一个朋友的信中才写到他已经自己改造了两辆马车,进行了三年为期10,000英里的道路试验。
再后来到1767年,瓦特和达尔文相见如故,这两个蒸汽机的狂热爱好者相互交流了他们对蒸汽机的看法(那个时候蒸汽机还没有用于工程领域),瓦特的想法是要将蒸汽机用于工业生产,达尔文则想用它取代马作为车的动力源(有一个原始汽车的概念设计)。
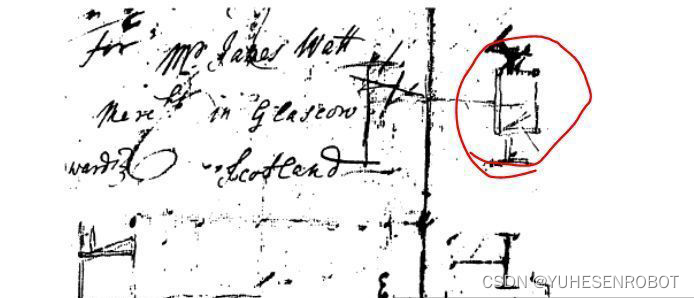
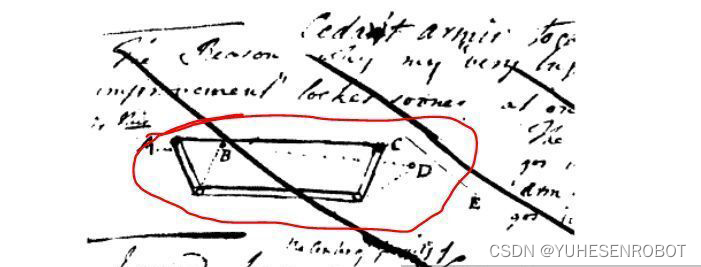
达尔文最初在写给瓦特的信里面介绍了他的蒸汽车的概念设计,下面这幅图达尔文是当时想阐述他的底盘设计的,但从这张图我们可以看到连杆转向机构的原始雏形:

在瓦特收到这封信号可以看到在信封上,瓦特又把这个结构确认为一个矩形结构。
最后我们可以看到梯形四连杆机构是达尔文1768年与另外一个朋友的书信来往:
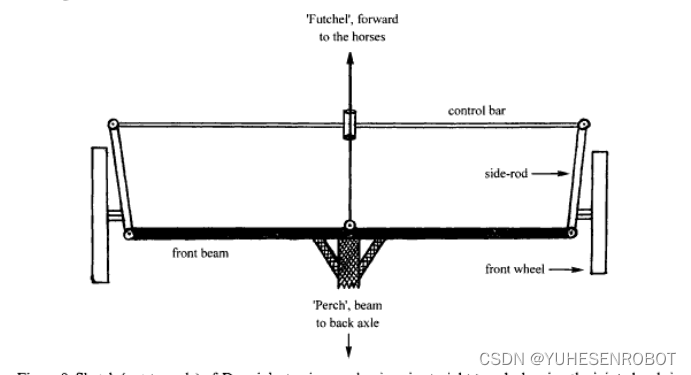
在这种结构中,这个实现基本与现代汽车上的转向机构区别不大了,虽然理论上实现了轮转向,但此后的近百年时间里,四轮马车仍旧采用轴转向的模式,最大的问题就是以当时的工业水平,实现轮转向的加工实在太难了,优势并不明显。真正让阿克曼转向发扬光大的还是汽车诞生。
我们看Benz的原型车: 一个简单的三轮车,我们可以大胆的猜想,当时CarBenz无法解决四轮车辆前轮转向这一难题,才临时采用了三轮车的形式。

从第二辆车开始,Benz再也没有采用过三轮模式,我们权且认为CarBenz解决掉了上述的问题,从此汽车产业一飞冲天。

二. 阿克曼结构在移动机器人上应用
移动机器人前期更多是采用两轮差动结构形式,从1956由查理·罗森(Charlie Rosen)领导的美国斯坦福研究所至今,直到2013年国内外大部分机器人行业应用研究与行业量化使用还是1956年的轮差动方案 。出现了250年前达尔文遇见的类似问题 ,通过性差 ,无法进行大载重负载室外运行 ,在应用中受场景限制。并且后期维护与更新频次高 。造成两轮差动方案在移动机器人应用中无法大规模量化 ,只在室内物流与作业场景有应用,无法在室内外全场景中实现应用 。

2013年四位移动机器人的狂热爱好者相互交流了他们对移动机器人的看法后成立了YUHESEN科技 (那个时候移动机器人还没有大规模应用 ),他们在思考如何能使智能移动机器人全面用于多场景工业生产,李雷达则想到使用阿克曼结构首先将移动机器人应用规模化达到全场景使用的技术方案(有一个原始阿克曼机器人的概念设计)。于是四位狂热爱好者就开始想办法对两轮差动方式机器人进行了改造,之后,又开始默默地进行道路试验起来。直到2016年,进行了三年为期10,000公里的道路试验。随即掀开了阿克曼结构移动机器人应用的大幕 ,伴随后续京东 ,阿里,美团,菜鸟等行业订单采购阿克曼移动机器人应用技术的推广,现在阿克曼技术已经全面量化 。行业数据显示作为移动机器人底盘 top 1企业的 YUHESEN 基本上在以每年350-400% 的应用增长 。行业内其他跟随企业的成长也在100% 以上 。

三 . 阿克曼移动机器人优势
轮式阿克曼转向机器人底盘应用于铺装道路场景中600kg内大负载配送 ,园区保安,智慧清洁,智能出行等场景机器人应用 。结构为通过后轮差数桥进行驱动,通过前轮控制方向实现前进、后退、半径转向功能 。 具有大负载背负,控制精度高等优势,是物流 ,安防,清扫 ,与老人出行辅助机器人应用的标准配置机器人底盘 。
模块化阿克曼智能移动机器人底盘平台







