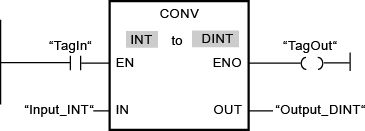
CONVERT:转换值
“转换值”指令将读取参数 IN 的内容,并根据指令框中选择的数据类型对其进行转换。转换值将在 OUT 输出处输出。
如果满足下列条件之一,则使能输出 ENO 的信号状态为“0”:
- 使能输入 EN 的信号状态为“0”。
- 执行过程中发生溢出之类的错误。
ROUND:取整
可以使用“取整”指令将输入 IN 的值四舍五入取整为最接近的整数。该指令将输入 IN 的值解释为浮点数,并转换为一个 DINT 数据类型的整数。如果输入值恰好是在一个偶数和一个奇数之间,则选择偶数。指令结果被发送到输出 OUT,可供查询。
CEIL:浮点数向上取整
可以使用“浮点数向上取整”指令,将输入 IN 的值向上取整为相邻整数。该指令将输入 IN 的值解释为浮点数并将其转换为较大的相邻整数。指令结果被发送到输出 OUT,可供查询。输出值可以大于或等于输入值。
FLOOR:浮点数向下取整
可以使用“浮点数向下取整”指令,将输入 IN 的值向下取整为相邻整数。该指令将输入 IN 的值解释为浮点数,并将其向下转换为相邻的较小整数。指令结果被发送到输出 OUT,可供查询。输出值可以小于或等于输入值。
TRUNC:截尾取整
可以使用“截尾取整”指令由输入 IN 的值得出整数。输入 IN 的值被视为浮点数。该指令仅选择浮点数的整数部分,并将其发送到输出 OUT 中,不带小数位。
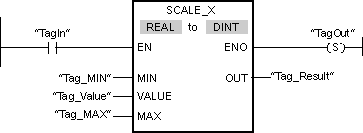
SCALE_X:缩放
可以使用“缩放”指令,通过将输入 VALUE 的值映射到指定的值范围内,对该值进行缩放。当执行“缩放”指令时,输入 VALUE 的浮点值会缩放到由参数 MIN 和 MAX 定义的值范围。缩放结果为整数,存储在 OUT 输出中。

“缩放”指令将按以下公式进行计算:
OUT = [VALUE ∗ (MAX – MIN)] + MIN
如果满足下列条件之一,则使能输出 ENO 的信号状态为“0”:
- 使能输入 EN 的信号状态为“0”。
- 输入 MIN 的值大于或等于输入 MAX 的值。
- 根据 IEEE-754 标准,指定的浮点数的值超出了标准的数范围。
- 发生溢出。
- 输入 VALUE 的值为 NaN(非数字 = 无效算术运算的结果)。
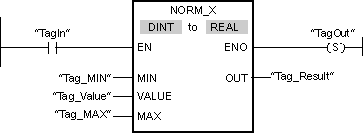
NORM_X:标准化
“标准化”指令将按以下公式进行计算:
OUT = (VALUE – MIN) / (MAX – MIN)