文章目录
- 一、题目解读
- 二、界面设计
- 三、矩阵计算实现
- 1、矩阵定义Matrix
- 2、矩阵构造Matrix()
- 3、单位矩阵MatrixE()
- 4、加减乘操作符重载+-*
- 5、矩阵转置transposs()
- 6、矩阵求逆Inverse()
- 四、数据存储结构设计
- 1、Sat类存一颗卫星的数据
- 2、Epoch类存一个历元的数据
- 3、DataCenter类存全部的数据
- 五、文件读取
- 六、最小二乘解算
- 1、计算卫星到接收机近似点的距离R0
- 2、构建设计矩阵B
- 3、构建观测向量残差L
- 4、构建权阵P
- 5、计算协因数阵Q
- 6、最小二乘计算增量dx
- 7、估计位置pos
- 8、计算验后残差V
- 9、计算验后单位权中误差sigma0
- 10、计算验后中误差sigma
- 11、计算PDOP值
- 12、循环解算过程
- 七、输出结果文件
- 八、代码汇总
- 1、Sat.cs
- 2、Epoch.cs
- 3、DataCenter.cs
- 4、Matrix.cs
- 5、Algorithm.cs
- 6、Form1.cs
一、题目解读
题目是简化了很多的GNSS伪距单点定位,而且比赛是单人四小时,可能到时候相比书上还要再简化一点。顺带一提,我的博客主要就是写GNSS,目前有RTKLIB、GraphGNSSLib、GNSS论文阅读,三个GNSS相关的专栏。
- RTKLIB是最知名的GNSS定位算法开源程序;
- GraphGNSSLib是一个因子图优化GNSS开源程序,基于ROS、Ceres非线性最小二乘库,用RTKLIB读取文件、然后重新用C++的方式组织数据、写算法。
伪距单点定位的基本原理就是用一台接收机同时接收4颗以上卫星,获取卫星到接收机之间的距离,根据空间后方交会的原理,构建伪距观测值和接收机位置间的方程组,解方程组得到接收机的位置。具体计算上还需要注意以下问题:
-
伪距观测值存在着很多的误差,有些可以建立模型修正(如:电离层延迟、对流层延迟、卫星钟差)、有些需要作为参数(如:接收机钟差)一并估计。伪距模型修正是在构建观测方程组之前,然后用修正后的伪距观测值计算观测残差。由于钟差作为参数,所以总的参数个数为4。
-
由于卫星数多于4颗,观测方程数大于参数个数,方程组超定,用最小二乘原理求出满足残差平方和最小的解。
-
由于观测方程不是线性的,得先线性化,在近似坐标处展开,求B、L矩阵。
-
由于各观测值的精度不同,引入权阵P来控制观测值对结果影响的权重,在本题中采用高度角定权模型。
-
解算完之后还要再求 σ 0 \sigma_0 σ0、 σ d x \sigma_{dx} σdx、 σ d y \sigma_{dy} σdy、 σ d z \sigma_{dz} σdz,PDOP,来衡量结果的精度。
书上给的C++代码里,这部分我觉得有问题,多了平方:
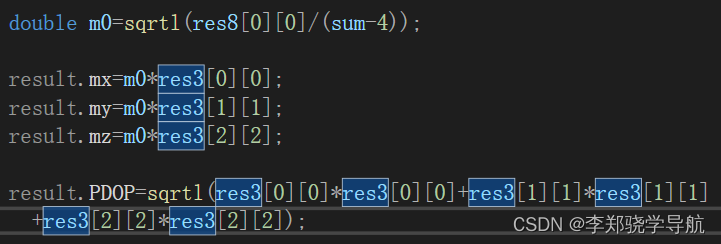
其中:res3是协因数阵 Q Q Q,由 ( B T P B ) − 1 (B^TPB)^{-1} (BTPB)−1传播定律得来

代码里说 Q Q Q是协方差阵,这也有问题,协因数阵为协方差阵除以单位权方差。所以求 σ d x \sigma_{dx} σdx、 σ d y \sigma_{dy} σdy、 σ d z \sigma_{dz} σdz是取协因数乘以单位权中误差。
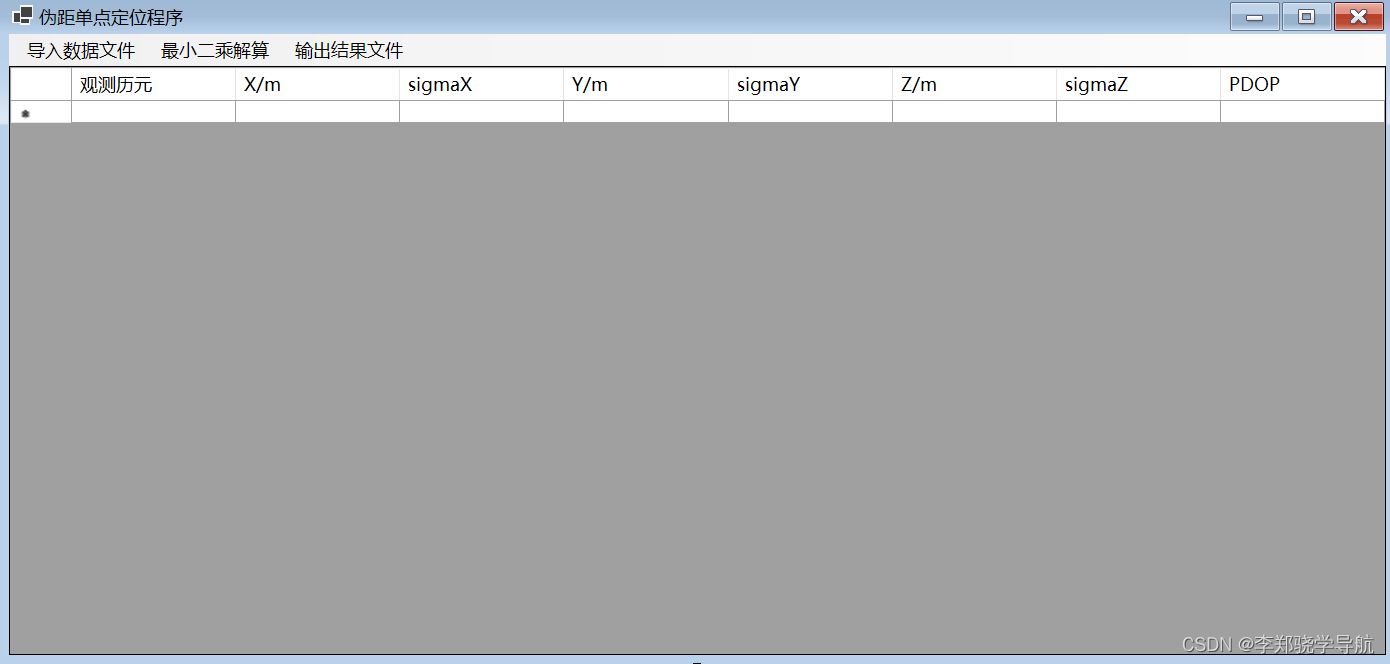
二、界面设计
做的比较简单,只用两个控件:一个menustrip,一个datagridview,达不到比赛的要求,还可以再加状态栏,加画图,加富文本框。
三、矩阵计算实现
1、矩阵定义Matrix
定义Matrix类来表示矩阵,矩阵的数据用二维double数组arr表示,字段m表示矩阵的行数、n表示矩阵的列数。
public class Matrix
{public int m;public int n;public double[,] arr;........
m、n用于确定要开辟数组的大小,判断矩阵计算能否实现。arr是矩阵数据存储的主体,操作数组元素:矩阵名.arr[行,列]
2、矩阵构造Matrix()
无参构造
public Matrix(){m = 0;n = 0;arr = new double[m, n];
}
拷贝构造:用另一个Matrix矩阵构造矩阵
public Matrix(Matrix s)
{this.m = s.m;this.n = s.n;arr = new double[m, n];this.arr = s.arr;
}
零矩阵构造:定义矩阵的行列数,元素全设为0
public Matrix(int mm, int nn)
{m = mm;n = nn;arr = new double[m, n];
}
3、单位矩阵MatrixE()
对角线元素全设置为1
public Matrix MatrixE(int mm, int nn)
{Matrix matrix = new Matrix(mm, nn);m = mm;n = nn;arr = new double[m, n];for (int i = 0; i < m; i++){for (int j = 0; j < n; j++){arr[i, j] = 1;}}return matrix;
}
4、加减乘操作符重载±*
加:需要行列数相等
static public Matrix operator +(Matrix A, Matrix B)
{Matrix C = new Matrix(A.m, A.n);//判断是否可以运算 if (A.m != B.m || A.n != B.n || A.m != C.m || A.n != C.n){System.Windows.Forms.MessageBox.Show("矩阵维数不同");}for (int i = 0; i < C.m; i++){for (int j = 0; j < C.n; j++){C.arr[i, j] = A.arr[i, j] + B.arr[i, j];}}return C;
}
减:同样,需要行列数相等
static public Matrix operator -(Matrix A, Matrix B)
{int i = 0;int j = 0;Matrix C = new Matrix(A.m, B.n);//判断是否可以运算 if (A.m != B.m || A.n != B.n ||A.m != C.m || A.n != C.n){Console.ReadKey();}for (i = 0; i < C.m; i++){for (j = 0; j < C.n; j++){C.arr[i, j] = A.arr[i, j] - B.arr[i, j];}}return C;
}
乘:前矩阵的列数等于后矩阵的行数,生成矩阵的维度为:前矩阵列数*后矩阵的行数
static public Matrix operator *(Matrix A, Matrix B)
{int i = 0;int j = 0;int k = 0;double temp = 0;Matrix C = new Matrix(A.m, B.n);//判断是否可以运算 if (A.m != C.m || B.n != C.n ||A.n != B.m){return C;}//运算 for (i = 0; i < C.m; i++){for (j = 0; j < C.n; j++){temp = 0;for (k = 0; k < A.n; k++){temp += A.arr[i, k] * B.arr[k, j];}C.arr[i, j] = temp;}}return C;
}
5、矩阵转置transposs()
public Matrix transposs(Matrix A)
{int i = 0;int j = 0;Matrix B = new Matrix(A.n, A.m);for (i = 0; i < B.m; i++){for (j = 0; j < B.n; j++){B.arr[i, j] = A.arr[j, i];}}return B;
}
6、矩阵求逆Inverse()
高斯-约旦法实现
public Matrix Inverse(Matrix matrix)
{matrix.arr = InverseMatrix(matrix.arr);return matrix;
}public double[,] InverseMatrix(double[,] matrix)
{int n = matrix.GetLength(0);double[,] result = new double[n, n];double[,] temp = new double[n, 2 * n];//将矩阵和单位矩阵拼接成一个2n*n的矩阵for (int i = 0; i < n; i++){for (int j = 0; j < n; j++){temp[i, j] = matrix[i, j];temp[i, j + n] = i == j ? 1 : 0;}}//高斯-约旦消元法for (int i = 0; i < n; i++){double tempValue = temp[i, i];for (int j = i; j < 2 * n; j++){temp[i, j] /= tempValue;}for (int j = 0; j < n; j++){if (j != i){tempValue = temp[j, i];for (int k = i; k < 2 * n; k++){temp[j, k] -= tempValue * temp[i, k];}}}}//取出逆矩阵for (int i = 0; i < n; i++){for (int j = 0; j < n; j++){result[i, j] = temp[i, j + n];}}return result;
}
注意:
- 判断矩阵能否计算可以计算之后的处理可以写的更完善一点,我这基本上没处理,比赛项目的代码量小,如果项目大,最好写完善一点,矩阵计算出错了要能知道在哪一步出错;而且如果不是比赛可以直接用现成的线性代数库。
- 矩阵求逆用的高斯-约旦消元法,看起来代码量最小,好写但时间复杂度太大。正常计算都是用各种分解方法,再计算,性能好很多。
- 操作符重载实现加减乘,调用起来方便,一行公式不用拆成几条语句。
- 如果用C++,我可以重载括号运算符,实现矩阵元素的辅值和取值;C#我不熟,重载括号运算符可以实现取值,但由于C#没有指针,不知道能不能实现赋值,就没那么写。
四、数据存储结构设计
数据存储由Sat、Epoch、DataCenter三个层次实现:Sat卫星类存一个历元一颗卫星的数据,通过文件读取获取;Epoch类存一个历元的数据,包括一个历元内所有的Sat、最小二乘计算的中间矩阵、最终结果;DataCenter存全部的数据,包括所有的Epoch和近似坐标。在Form1类的开头需要先实例化DataCenter data = new DataCenter();,以便之后读写里面的数据,起到类似全局变量的作用。
1、Sat类存一颗卫星的数据
public class Sat
{public Matrix stapos; //卫星位置public string PRN; //卫星PRNpublic double satColck; //卫星钟差public double elevation; //卫星高度角public double cl; //伪距public double tropDely; //对流层延迟public double R0; //估计几何距离
}
2、Epoch类存一个历元的数据
内含List<Sat> sats卫星列表
public class Epoch
{public int satNum; //卫星数public int gpsTime; //历元时间public List<Sat> sats; //卫星观测值列表public Matrix dx; //最小二乘求得的增量dxpublic Matrix pos; //最小二乘估计的位置public double sigma0; //延后单位权中误差public Matrix sigma; //各个方向的中误差public double PDOP; //PDOPpublic Matrix Q; //协因数阵public Matrix P; //权阵public Matrix B; //设计矩阵public Matrix L; //观测残差向量public Matrix V; //后验残差
}
3、DataCenter类存全部的数据
内含List<Epoch> Epoches历元列表
public class DataCenter
{public List<Epoch> Epoches; //历元列表public Matrix APPROX_POSITION; //近似坐标
}
五、文件读取
private void 导入数据文件ToolStripMenuItem_Click(object sender, EventArgs e)
{try{OpenFileDialog opf = new OpenFileDialog();opf.Filter = "文本文件|*.txt";opf.Title = "请选择要导入的数据文件";if (opf.ShowDialog() == DialogResult.OK){StreamReader sr = new StreamReader(opf.FileName);string[] lines = sr.ReadLine().Trim().Split(',', ':', ':', '(');data.APPROX_POSITION = new Matrix(3, 1, new double[3, 1] {{double.Parse( lines[1])},{ double.Parse( lines[2]) },{ double.Parse( lines[3])} });sr.ReadLine(); //第二行跳过//每一次while循环读取一个历元的数据Epoch epoch = new Epoch();Sat sat = new Sat();data.Epoches = new List<Epoch>();while (!sr.EndOfStream){epoch = new Epoch();epoch.sats = new List<Sat>();lines = sr.ReadLine().Trim().Split(',', ':', ':');if (lines == null){break;}epoch.satNum = int.Parse(lines[1]);epoch.gpsTime = int.Parse(lines[3]);for (int i = 0; i < epoch.satNum; i++){sat = new Sat();lines = sr.ReadLine().Trim().Split(',', ':', ':');sat.PRN = lines[0];sat.stapos = new Matrix(3, 1, new double[3, 1] {{double.Parse( lines[1])},{ double.Parse( lines[2]) },{ double.Parse( lines[3])} });sat.satColck = double.Parse(lines[4]);sat.elevation = double.Parse(lines[5]);sat.cl = double.Parse(lines[6]);sat.tropDely = double.Parse(lines[7]);epoch.sats.Add(sat);}data.Epoches.Add(epoch);}}}catch (Exception){MessageBox.Show("文件读取出错,请检查文件是否正确!!");throw;}}
执行流程:
- 写在一个大的
try-catch里,以便异常捕获,正常开发应该写的跟细一点,但咱比赛就没这必要了。 - 创建文件对话框
opf,ShowDialog()显示文件,获取文件全路径opf.FileName,创建读文件流sr。 - 读取第一行,获取近似坐标。
- 第二行跳过。
- 进入
while(!sr.EndOfStream)循环,每次循环读取一个历元的数据到epoch:- 先读取历元的开头,获取卫星数,历元时间到
epoch。 - 根据卫星数for循环,一次读取一颗卫星的数据到
sat里,再加到epoch的卫星列表里。 - 把
epoch加到data的历元列表里。
- 先读取历元的开头,获取卫星数,历元时间到
注意:
- 原始数据文件的编码最好转成
UTF-8再读取,否则一些中文的标点符号读取不出来,产生错误。转UTF-8方法:①代码内转换,需要知道文件的原始编码,写对应的转换代码。②手动转换:用Windows自带的记事本打开文件,点”另存为“,保存按钮坐标有编码格式,默认是文件的原始格式,选择“UTF-8”,以UTF-8保存。- 标点符号要注意,给的乱的很,有中文全角、有英文乱角,
split()的时候都选上吧。另外注意(也是需要加到split()里的。- 用
while (!sr.EndOfStream)做文件是否读完的判断,结尾可能有空行检验不到,如果不进行处理会产生异常,所以我还进行了非空判断if (lines == null) {break}。
六、最小二乘解算
1、计算卫星到接收机近似点的距离R0
R 0 j = ( X i − X 0 ) 2 + ( Y i − Y 0 ) 2 + ( Z i − Z 0 ) 2 R_{0}^{j}=\sqrt{\left(X^{i}-X_{0}\right)^{2}+\left(Y^{i}-Y_{0}\right)^{2}+\left(Z^{i}-Z_{0}\right)^{2}} R0j=(Xi−X0)2+(Yi−Y0)2+(Zi−Z0)2
double R0 = Math.Sqrt(Math.Pow(epoch.sats[i].stapos.arr[0, 0] - pos0.arr[0, 0], 2) +
Math.Pow(epoch.sats[i].stapos.arr[1, 0] - pos0.arr[1, 0], 2)
+ Math.Pow(epoch.sats[i].stapos.arr[2, 0] - pos0.arr[2, 0], 2));
2、构建设计矩阵B
B = [ l 1 m 1 n 1 − 1 l 2 m 2 n 2 − 1 ⋮ ⋮ ⋮ − 1 l n m n n n − 1 ] \boldsymbol{B}=\left[\begin{array}{cccc} l^{1} & m^{1} & n^{1} & -1 \\ l^{2} & m^{2} & n^{2} & -1 \\ \vdots & \vdots & \vdots & -1 \\ l^{n} & m^{n} & n^{n} & -1 \end{array}\right] B= l1l2⋮lnm1m2⋮mnn1n2⋮nn−1−1−1−1
其中, l i = X i − X 0 R 0 i l^{i}=\frac{X^{i}-X_{0}}{R_{0}^{i}} li=R0iXi−X0, m ′ = Y i − Y 0 R 0 i m^{\prime}=\frac{Y^{i}-Y_{0}}{R_{0}^{i}} m′=R0iYi−Y0, n i = Z i − Z 0 R 0 i n^{i}=\frac{Z^{i}-Z_{0}}{R_{0}^{i}} ni=R0iZi−Z0
epoch.B.arr[i, 0] = (epoch.sats[i].stapos.arr[0, 0] - pos0.arr[0, 0]) / R0;
epoch.B.arr[i, 1] = (epoch.sats[i].stapos.arr[1, 0] - pos0.arr[1, 0]) / R0;
epoch.B.arr[i, 2] = (epoch.sats[i].stapos.arr[2, 0] - pos0.arr[2, 0]) / R0;
epoch.B.arr[i, 3] = -1;
3、构建观测向量残差L
L = [ P 1 P 2 ⋮ P n ] − [ R 0 1 R 0 2 ⋮ R 0 n ] + [ d t 1 d t 2 ⋮ d t 3 ] − [ d trop 1 d trop 2 ⋮ d trop n ] \boldsymbol{L}=\left[\begin{array}{c} P^{1} \\ P^{2} \\ \vdots \\ P^{n} \end{array}\right]-\left[\begin{array}{c} R_{0}^{1} \\ R_{0}^{2} \\ \vdots \\ R_{0}^{n} \end{array}\right]+\left[\begin{array}{c} d t^{1} \\ d t^{2} \\ \vdots \\ d t^{3} \end{array}\right]-\left[\begin{array}{c} d_{\text {trop }}^{1} \\ d_{\text {trop }}^{2} \\ \vdots \\ d_{\text {trop }}^{n} \end{array}\right] L= P1P2⋮Pn − R01R02⋮R0n + dt1dt2⋮dt3 − dtrop 1dtrop 2⋮dtrop n
epoch.L.arr[i, 0] = epoch.sats[i].cl - R0 + epoch.sats[i].satColck - epoch.sats[i].tropDely;
注意正负号!!
4、构建权阵P
P j = [ p 1 0 0 0 0 p 2 0 0 0 0 ⋯ 0 0 0 0 p m ] \boldsymbol{P}_{j}=\left[\begin{array}{cccc} p_{1} & 0 & 0 & 0 \\ 0 & p_{2} & 0 & 0 \\ 0 & 0 & \cdots & 0 \\ 0 & 0 & 0 & p_{m} \end{array}\right] Pj= p10000p20000⋯0000pm
高度角定权,认为各卫星之间无相关性,只有对角线上有元素,其中 p i = 1 σ p i 2 = sin ( θ i ) σ P , 0 2 p^{i}=\frac{1}{\sigma_{p^{i}}^{2}}=\frac{\sin \left(\theta^{i}\right)}{\sigma_{P, 0}^{2}} pi=σpi21=σP,02sin(θi), σ P , 0 2 = 0.04 m 2 \sigma_{P, 0}^{2}=0.04 \mathrm{~m}^{2} σP,02=0.04 m2
注意:计算正弦值需要将角度转为弧度
epoch.P.arr[i, i] = Math.Sin(epoch.sats[i].elevation * Math.PI / 180) / 0.04;
5、计算协因数阵Q
Q = ( B T P B ) − 1 \boldsymbol{Q}=\left(\boldsymbol{B}^{\mathrm{T}} P \boldsymbol{B}\right)^{-1} Q=(BTPB)−1
epoch.Q = pos0.Inverse((pos0.transposs(epoch.B) * epoch.P * epoch.B));
6、最小二乘计算增量dx
d x = − ( B ⊤ P B ) − 1 B ⊤ P L = Q B ⊤ P L d x=-\left(B^{\top} P B\right)^{-1} B^{\top} P L=QB^{\top} P L dx=−(B⊤PB)−1B⊤PL=QB⊤PL
Matrix zero = new Matrix(4, 1);
epoch.dx = zero - epoch.Q * pos0.transposs(epoch.B) * epoch.P * epoch.L;
Matrix _dx = new Matrix(3, 1);
_dx.arr[0, 0] = epoch.dx.arr[0, 0];
_dx.arr[1, 0] = epoch.dx.arr[1, 0];
_dx.arr[2, 0] = epoch.dx.arr[2, 0];
注意:不能直接在式子前面加负号
-,只能用一个0向量来减去全式,实现取反。
7、估计位置pos
X = X 0 + d x = [ X 0 Y 0 Z 0 ] + [ d X d Y d Z ] \boldsymbol{X}=\boldsymbol{X}_{0}+\boldsymbol{d} \boldsymbol{x}=\left[\begin{array}{l} X_{0} \\ Y_{0} \\ Z_{0} \end{array}\right]+\left[\begin{array}{l} d X \\ d Y \\ d Z \end{array}\right] X=X0+dx= X0Y0Z0 + dXdYdZ
epoch.pos = pos0 + _dx;
8、计算验后残差V
V = B ⋅ d x + L {V=B \cdot d x+L} V=B⋅dx+L
epoch.V = epoch.B * epoch.dx + epoch.L;
Matrix vtpv = pos0.transposs(epoch.V) * epoch.P * epoch.V;
9、计算验后单位权中误差sigma0
σ 0 = V T P V n − 4 \sigma_{0}=\sqrt{\frac{\boldsymbol{V}^{\mathrm{T}} \boldsymbol{P} \boldsymbol{V}}{n-4}} σ0=n−4VTPV
epoch.sigma0 = Math.Sqrt(vtpv.arr[0, 0] / (epoch.satNum - 4));
10、计算验后中误差sigma
σ d x = σ 0 ⋅ q d x , d x , σ d Y = σ 0 ⋅ q d x , d y , σ d z = σ 0 ⋅ q d x , d x , σ d t = σ 0 ⋅ q d t , d t {\sigma_{d x}=\sigma_{0} \cdot \sqrt{q_{d x, d x}}, \sigma_{d Y}=\sigma_{0} \cdot \sqrt{q_{d x, d y}}, \sigma_{d z}=\sigma_{0} \cdot \sqrt{q_{d x, d x}}, \sigma_{d t}=\sigma_{0} \cdot \sqrt{q_{d t, d t}}} σdx=σ0⋅qdx,dx,σdY=σ0⋅qdx,dy,σdz=σ0⋅qdx,dx,σdt=σ0⋅qdt,dt
epoch.sigma = new Matrix(4, 1);
epoch.sigma.arr[0, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[0, 0]) ;
epoch.sigma.arr[1, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[1, 1]) ;
epoch.sigma.arr[2, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[2, 2]) ;
epoch.sigma.arr[3, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[3, 3]) ;
11、计算PDOP值
PDOP = q d x , d x + q d y , d y + q d z , d z \text { PDOP }=\sqrt{q_{d x, d x}+q_{d y, d y}+q_{d z, d z}} PDOP =qdx,dx+qdy,dy+qdz,dz
epoch.PDOP = Math.Sqrt(epoch.Q.arr[0, 0] + epoch.Q.arr[1, 1] + epoch.Q.arr[2, 2]);
12、循环解算过程
最小二乘的算法我分别写在了两个函数里,CalBLP()和Lsq(),计算的时候,就是简单的单历元平差,每个历元分别调用一遍两个函数:
for (int i = 0; i < data.Epoches.Count(); i++)
{algorithm.CalBLP(data.APPROX_POSITION, data.Epoches[i]);algorithm.Lsq(data.APPROX_POSITION, data.Epoches[i]);
}
注意:在我的计算过程中:
- 每个历元的近似值都用的是题目给的近似值,正常解算需要上一个历元的结果作为下一个历元的初值。
- 一个历元内只执行了一次最小二乘计算,正常解算需要一个历元内多次迭代,以弱化线性化和初值选取不准确的误差。
- 题目没有具体规定,写简单点就好。想实现迭代也不难,加个循环、每次计算完把结果赋值给近似坐标就行。
七、输出结果文件
private void 输出结果文件ToolStripMenuItem_Click(object sender, EventArgs e){if (data.Epoches == null){MessageBox.Show("请先导入数据");return;}if (data.Epoches[0].B == null){MessageBox.Show("请先进行最小二乘解算");return;}string Report = "";Report += "——————————————————————————————————————\n" +"———————————————— 最小二乘解算结果 ——————————————" +"\n——————————————————————————————————————\n" +"观测历元 X / m σx / m Y / m σy / m Z / m σz / m PDOP \n";for (int i = 0; i < data.Epoches.Count; i++){Report += data.Epoches[i].gpsTime.ToString() +" : "+data.Epoches[i].pos.arr[0, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[0, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[1, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[1, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[2, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[2, 0].ToString("0.0000") +" "+data.Epoches[i].PDOP.ToString("0.0000") + "\n";}SaveFileDialog svf = new SaveFileDialog();svf.Filter = "文本文件|*.txt";if (svf.ShowDialog() == DialogResult.OK){StreamWriter sw = new StreamWriter(svf.FileName);sw.Write(Report);sw.Flush();}}
执行流程:
- 先进行判断,是否已经进行过文件读取,是否已经完成计算。
- 定义
string类型变量Report,将文件的开头写到Report里,在循环将每一个历元的数据都加到Report里。 - 创建保存文件对话框
svf,获取文件路径,创建文件IO流sw,将Report内容写入sw
八、代码汇总
1、Sat.cs
public class Sat
{public Matrix stapos; //卫星位置public string PRN; //卫星PRNpublic double satColck; //卫星钟差public double elevation; //卫星高度角public double cl; //伪距public double tropDely; //对流层延迟public double R0; //估计几何距离
}
2、Epoch.cs
public class Epoch
{public int satNum; //卫星数public int gpsTime; //历元时间public List<Sat> sats; //卫星观测值列表public Matrix dx; //最小二乘求得的增量dxpublic Matrix pos; //最小二乘估计的位置public double sigma0; //延后单位权中误差public Matrix sigma; //各个方向的中误差public double PDOP; //PDOPpublic Matrix Q; //协因数阵public Matrix P; //权阵public Matrix B; //设计矩阵public Matrix L; //观测残差向量public Matrix V; //延后残差
}
3、DataCenter.cs
public class DataCenter
{public List<Epoch> Epoches; //历元列表public Matrix APPROX_POSITION; //近似坐标
}
4、Matrix.cs
public class Matrix
{public int m;public int n;public double[,] arr;/// <summary>/// 创建一个矩阵0*0/// </summary>public Matrix(){m = 0;n = 0;arr = new double[m, n];}/// <summary>/// 拷贝构造/// </summary>/// <param name="s"></param>public Matrix(Matrix s){this.m = s.m;this.n = s.n;arr = new double[m, n];this.arr = s.arr;}public Matrix(int mm, int nn, double[,] arr){m = mm;n = nn;this.arr = arr;}public Matrix(int mm, int nn){m = mm;n = nn;arr = new double[m, n];}/// <summary>/// 创建单位阵/// </summary>/// <param name="mm"></param>/// <param name="nn"></param>/// <returns></returns>public Matrix MatrixE(int mm, int nn){Matrix matrix = new Matrix(mm, nn);m = mm;n = nn;arr = new double[m, n];for (int i = 0; i < m; i++){for (int j = 0; j < n; j++){arr[i, j] = 1;}}return matrix;}/// <summary>/// 重载操作符实现矩阵加法/// </summary>/// <param name="A"></param>/// <param name="B"></param>/// <returns></returns>static public Matrix operator +(Matrix A, Matrix B){Matrix C = new Matrix(A.m, A.n);//判断是否可以运算 if (A.m != B.m || A.n != B.n || A.m != C.m || A.n != C.n){System.Windows.Forms.MessageBox.Show("矩阵维数不同");}for (int i = 0; i < C.m; i++){for (int j = 0; j < C.n; j++){C.arr[i, j] = A.arr[i, j] + B.arr[i, j];}}return C;}/// <summary>/// 重载操作符实现矩阵减法/// </summary>/// <param name="A"></param>/// <param name="B"></param>/// <returns></returns>static public Matrix operator -(Matrix A, Matrix B){int i = 0;int j = 0;Matrix C = new Matrix(A.m, B.n);//判断是否可以运算 if (A.m != B.m || A.n != B.n ||A.m != C.m || A.n != C.n){Console.ReadKey();}for (i = 0; i < C.m; i++){for (j = 0; j < C.n; j++){C.arr[i, j] = A.arr[i, j] - B.arr[i, j];}}return C;}/// <summary>/// 重载操作符实现矩阵乘法/// </summary>/// <param name="A"></param>/// <param name="B"></param>/// <returns></returns>static public Matrix operator *(Matrix A, Matrix B){int i = 0;int j = 0;int k = 0;double temp = 0;Matrix C = new Matrix(A.m, B.n);//判断是否可以运算 if (A.m != C.m || B.n != C.n ||A.n != B.m){return C;}//运算 for (i = 0; i < C.m; i++){for (j = 0; j < C.n; j++){temp = 0;for (k = 0; k < A.n; k++){temp += A.arr[i, k] * B.arr[k, j];}C.arr[i, j] = temp;}}return C;}/// <summary>/// 矩阵转置/// </summary>/// <param name="A"></param>/// <returns></returns>public Matrix transposs(Matrix A){int i = 0;int j = 0;Matrix B = new Matrix(A.n, A.m);for (i = 0; i < B.m; i++){for (j = 0; j < B.n; j++){B.arr[i, j] = A.arr[j, i];}}return B;}public double[,] InverseMatrix(double[,] matrix){int n = matrix.GetLength(0);double[,] result = new double[n, n];double[,] temp = new double[n, 2 * n];//将矩阵和单位矩阵拼接成一个2n*n的矩阵for (int i = 0; i < n; i++){for (int j = 0; j < n; j++){temp[i, j] = matrix[i, j];temp[i, j + n] = i == j ? 1 : 0;}}//高斯-约旦消元法for (int i = 0; i < n; i++){double tempValue = temp[i, i];for (int j = i; j < 2 * n; j++){temp[i, j] /= tempValue;}for (int j = 0; j < n; j++){if (j != i){tempValue = temp[j, i];for (int k = i; k < 2 * n; k++){temp[j, k] -= tempValue * temp[i, k];}}}}//取出逆矩阵for (int i = 0; i < n; i++){for (int j = 0; j < n; j++){result[i, j] = temp[i, j + n];}}return result;}/// <summary>/// 矩阵求逆/// </summary>/// <param name="matrix"></param>/// <returns></returns>public Matrix Inverse(Matrix matrix){matrix.arr = InverseMatrix(matrix.arr);return matrix;}}
5、Algorithm.cs
public class Algorithm
{/// <summary>/// 计算BLP/// </summary>/// <param name="pos0"></param>/// <param name="epoch"></param>public void CalBLP(Matrix pos0, Epoch epoch){epoch.B = new Matrix(epoch.satNum, 4);epoch.L = new Matrix(epoch.satNum, 1);epoch.P = new Matrix(epoch.satNum, epoch.satNum);for (int i = 0; i < epoch.satNum; i++){//卫星到接收机近似点的距离R0double R0 = Math.Sqrt(Math.Pow(epoch.sats[i].stapos.arr[0, 0] - pos0.arr[0, 0], 2) +Math.Pow(epoch.sats[i].stapos.arr[1, 0] - pos0.arr[1, 0], 2)+ Math.Pow(epoch.sats[i].stapos.arr[2, 0] - pos0.arr[2, 0], 2));//设计矩阵Bepoch.B.arr[i, 0] = (epoch.sats[i].stapos.arr[0, 0] - pos0.arr[0, 0]) / R0; epoch.B.arr[i, 1] = (epoch.sats[i].stapos.arr[1, 0] - pos0.arr[1, 0]) / R0;epoch.B.arr[i, 2] = (epoch.sats[i].stapos.arr[2, 0] - pos0.arr[2, 0]) / R0;epoch.B.arr[i, 3] = -1;//观测向量Lepoch.L.arr[i, 0] = epoch.sats[i].cl - R0 + epoch.sats[i].satColck - epoch.sats[i].tropDely;//权阵Pepoch.P.arr[i, i] = Math.Sin(epoch.sats[i].elevation * Math.PI / 180) / 0.04;}}/// <summary>/// 最小二乘解算/// </summary>/// <param name="pos0"></param>/// <param name="epoch"></param>public void Lsq(Matrix pos0, Epoch epoch){Matrix zero = new Matrix(4, 1);//协因数Qepoch.Q = pos0.Inverse((pos0.transposs(epoch.B) * epoch.P * epoch.B));//增量dxepoch.dx = zero - epoch.Q * pos0.transposs(epoch.B) * epoch.P * epoch.L;Matrix _dx = new Matrix(3, 1);_dx.arr[0, 0] = epoch.dx.arr[0, 0];_dx.arr[1, 0] = epoch.dx.arr[1, 0];_dx.arr[2, 0] = epoch.dx.arr[2, 0];//估计位置epoch.pos = pos0 + _dx;//后验残差Vepoch.V = epoch.B * epoch.dx + epoch.L;Matrix vtpv = pos0.transposs(epoch.V) * epoch.P * epoch.V;//单位权中误差epoch.sigma0 = Math.Sqrt(vtpv.arr[0, 0] / (epoch.satNum - 4));epoch.sigma = new Matrix(4, 1);epoch.sigma.arr[0, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[0, 0]) ;epoch.sigma.arr[1, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[1, 1]) ;epoch.sigma.arr[2, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[2, 2]) ;epoch.sigma.arr[3, 0] = epoch.sigma0 * Math.Sqrt(epoch.Q.arr[3, 3]) ;//PDOP值epoch.PDOP = Math.Sqrt(epoch.Q.arr[0, 0] + epoch.Q.arr[1, 1] + epoch.Q.arr[2, 2]);}
}
6、Form1.cs
public partial class Form1 : Form
{public Form1(){InitializeComponent();}DataCenter data = new DataCenter();private void dataGridView1_CellContentClick(object sender, DataGridViewCellEventArgs e){}private void 导入数据文件ToolStripMenuItem_Click(object sender, EventArgs e){try{OpenFileDialog opf = new OpenFileDialog();opf.Filter = "文本文件|*.txt";opf.Title = "请选择要导入的数据文件";if (opf.ShowDialog() == DialogResult.OK){StreamReader sr = new StreamReader(opf.FileName);string[] lines = sr.ReadLine().Trim().Split(',', ':', ':', '(');data.APPROX_POSITION = new Matrix(3, 1, new double[3, 1] {{double.Parse( lines[1])},{ double.Parse( lines[2]) },{ double.Parse( lines[3])} });sr.ReadLine(); //第二行跳过//每一次while循环读取一个历元的数据Epoch epoch = new Epoch();Sat sat = new Sat();data.Epoches = new List<Epoch>();while (!sr.EndOfStream){epoch = new Epoch();epoch.sats = new List<Sat>();lines = sr.ReadLine().Trim().Split(',', ':', ':');if (lines == null){break;}epoch.satNum = int.Parse(lines[1]);epoch.gpsTime = int.Parse(lines[3]);for (int i = 0; i < epoch.satNum; i++){sat = new Sat();lines = sr.ReadLine().Trim().Split(',', ':', ':');sat.PRN = lines[0];sat.stapos = new Matrix(3, 1, new double[3, 1] {{double.Parse( lines[1])},{ double.Parse( lines[2]) },{ double.Parse( lines[3])} });sat.satColck = double.Parse(lines[4]);sat.elevation = double.Parse(lines[5]);sat.cl = double.Parse(lines[6]);sat.tropDely = double.Parse(lines[7]);epoch.sats.Add(sat);}data.Epoches.Add(epoch);}}}catch (Exception){MessageBox.Show("文件读取出错,请检查文件是否正确!!");throw;}}private void 最小二乘解算ToolStripMenuItem_Click(object sender, EventArgs e){if (data.Epoches==null){MessageBox.Show("请先导入数据");return;}Algorithm algorithm = new Algorithm();//遍历每一个历元,最小二乘解算for (int i = 0; i < data.Epoches.Count(); i++){algorithm.CalBLP(data.APPROX_POSITION, data.Epoches[i]);algorithm.Lsq(data.APPROX_POSITION, data.Epoches[i]);}//将解算结果输出到表格dataGridView1.RowCount = data.Epoches.Count;for (int i = 0; i < data.Epoches.Count; i++){dataGridView1.Rows[i].Cells[0].Value = data.Epoches[i].gpsTime;dataGridView1.Rows[i].Cells[1].Value = data.Epoches[i].pos.arr[0, 0];dataGridView1.Rows[i].Cells[2].Value = data.Epoches[i].sigma.arr[0, 0];dataGridView1.Rows[i].Cells[3].Value = data.Epoches[i].pos.arr[1, 0];dataGridView1.Rows[i].Cells[4].Value = data.Epoches[i].sigma.arr[1, 0];dataGridView1.Rows[i].Cells[5].Value = data.Epoches[i].pos.arr[2, 0];dataGridView1.Rows[i].Cells[6].Value = data.Epoches[i].sigma.arr[2, 0];dataGridView1.Rows[i].Cells[7].Value = data.Epoches[i].PDOP;}}private void 输出结果文件ToolStripMenuItem_Click(object sender, EventArgs e){if (data.Epoches == null){MessageBox.Show("请先导入数据");return;}if (data.Epoches[0].B == null){MessageBox.Show("请先进行最小二乘解算");return;}string Report = "";Report += "——————————————————————————————————————\n" +"———————————————— 最小二乘解算结果 ——————————————" +"\n——————————————————————————————————————\n" +"观测历元 X / m σx / m Y / m σy / m Z / m σz / m PDOP \n";for (int i = 0; i < data.Epoches.Count; i++){Report += data.Epoches[i].gpsTime.ToString() +" : "+data.Epoches[i].pos.arr[0, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[0, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[1, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[1, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[2, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[2, 0].ToString("0.0000") +" "+data.Epoches[i].PDOP.ToString("0.0000") + "\n";}SaveFileDialog svf = new SaveFileDialog();svf.Filter = "文本文件|*.txt";if (svf.ShowDialog() == DialogResult.OK){StreamWriter sw = new StreamWriter(svf.FileName);sw.Write(Report);sw.Flush();}}
}"\n——————————————————————————————————————\n" +"观测历元 X / m σx / m Y / m σy / m Z / m σz / m PDOP \n";for (int i = 0; i < data.Epoches.Count; i++){Report += data.Epoches[i].gpsTime.ToString() +" : "+data.Epoches[i].pos.arr[0, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[0, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[1, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[1, 0].ToString("0.0000") +" "+data.Epoches[i].pos.arr[2, 0].ToString("0.0000") +" "+ data.Epoches[i].sigma.arr[2, 0].ToString("0.0000") +" "+data.Epoches[i].PDOP.ToString("0.0000") + "\n";}SaveFileDialog svf = new SaveFileDialog();svf.Filter = "文本文件|*.txt";if (svf.ShowDialog() == DialogResult.OK){StreamWriter sw = new StreamWriter(svf.FileName);sw.Write(Report);sw.Flush();}}
}