先自报家门吧,本人大二,来自双一流大学,具体那个大学就不介绍了,在大一的时候就进入了专业实验室,本参与实验的培训,学习了很多关于单片机的知识,在今年,学校组织参加电赛,经过两轮的重重筛选,进入了最后的队伍,第二轮电赛我们抽到的题目是电磁炮,我从底层开始写代码,因为之前参加过机甲大师赛,对freerots操作系统情有独钟,所以在刚开始,就准备用这个操作系统写代码,但是很遗憾没有移植成功,所以就用蓝牙串口接收的数据作为任务切换的指令,主控用的stm32f103c8t6最小系统板。经过两天辛苦编写,终于完成了基本框架,然后进入了最终的调试阶段。
我的实现逻辑是用TOF激光测距进行距离的测试,作为充电时间判断依据,本来打算用matlab进行数据拟合,这里为了方便就直接乘以一个系数就作为了判断依据。tof的数据解析代码如下。
unsigned char ucRxFinish=0;
static unsigned char ucCnt=0,ucLen=0;
unsigned char ucRxData[100];
void USART2_IRQHandler(void) //串口1中断服务程序
{unsigned char temp=0;u16 C=0;if(USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {temp=USART_ReceiveData(USART2);if(ucCnt==0)ucRxData[ucCnt++]=temp;else if((ucCnt==1)&(temp==0x03))ucRxData[ucCnt++]=temp;else if(ucCnt==2){ucRxData[ucCnt++]=temp; ucLen=ucRxData[2];}else if((ucCnt>2)&(ucCnt<=(ucLen+4)))ucRxData[ucCnt++]=temp;if(ucCnt==(ucLen+5)){ C=ModbusCRC(ucRxData,ucLen+3);if(C==((ucRxData[ucLen+3]<<8)|ucRxData[ucLen+4])){ucRxFinish=1; ucCnt=0;ucLen=0;} else {ucCnt=0;ucLen=0;} }}USART_ClearITPendingBit(USART2, USART_IT_RXNE);
} tof用的串口2,串口2的初始化代码
void USART2_Config(void)
{//GPIO端口设置GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);//USART1_TX GPIOA.2GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2; //PA.2GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10//USART1_RX GPIOA3初始GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;//PA3GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.3//Usart1 NVIC 配置NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级3NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器//USART 初始化设置USART_InitStructure.USART_BaudRate = 115200;//串口波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式USART_Init(USART2, &USART_InitStructure); //初始化串口1USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//开启串口接受中断USART_Cmd(USART2, ENABLE); //使能串口1
这里是直接复制串口一的初始化修改的,所以有些注释没有改,能用就行!
这是我写的第一篇博客,希望大家见谅,逻辑有些不清晰,我还是重硬件初始化讲起吧!
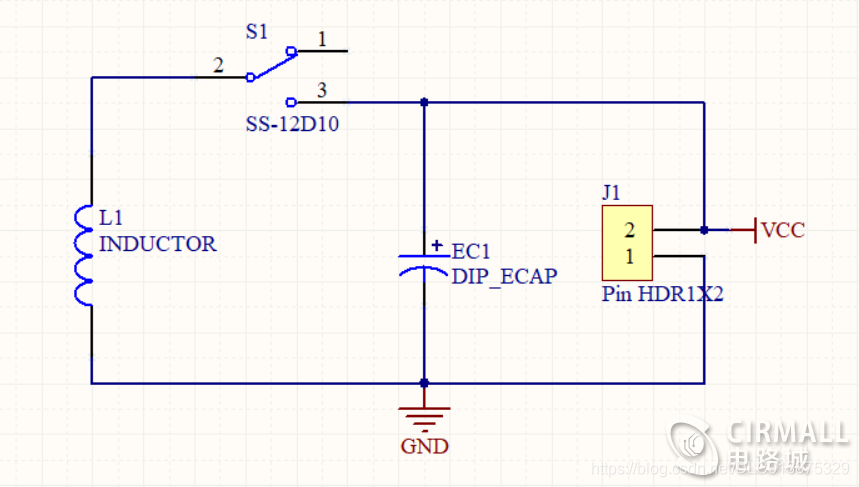
如上是硬件部分。
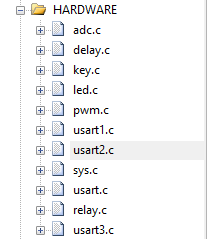
ADC本来是打算用来测电压的,但是由于电磁炮电容的电压太大了,而且还是交流电,交流转直流然后降压下来太麻烦了,所以在程序里面并没有用。
delay就不要说了,延时函数,key是按键。
pwm是给舵机配置的,这里用了三个串口,relay是继电器的文件,用继电器控制电磁炮的充电和放电。
PWM初始化代码:
void TIM4_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure; //声明一个结构体变量,用来初始化GPIOTIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//声明一个结构体变量,用来初始化定时器TIM_OCInitTypeDef TIM_OCInitStructure;//根据TIM_OCInitStruct中指定的参数初始化外设TIMx/* 开启时钟 */RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);/* 配置GPIO的模式和IO口 */GPIO_InitStructure.GPIO_Pin=GPIO_Pin_7|GPIO_Pin_8;// PB7GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出GPIO_Init(GPIOB,&GPIO_InitStructure);//TIM4定时器初始化TIM_TimeBaseInitStructure.TIM_Period = 1999; //PWM 频率=72000/(199+1)=36Khz//设置自动重装载寄存器周期的值TIM_TimeBaseInitStructure.TIM_Prescaler = 71;//设置用来作为TIMx时钟频率预分频值TIM_TimeBaseInitStructure.TIM_ClockDivision = 0;//设置时钟分割:TDTS = Tck_timTIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM4, & TIM_TimeBaseInitStructure);//PWM初始化 //根据TIM_OCInitStruct中指定的参数初始化外设TIMxTIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1;TIM_OCInitStructure.TIM_Pulse = 0;TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//PWM输出使能TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_Low;TIM_OC3Init(TIM4,&TIM_OCInitStructure);//注意此处初始化时TIM_OC1Init而不是TIM_OCInit,否则会出错。因为固件库的版本不一样。TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable);//使能或者失能TIMx在CCR1上的预装载寄存器TIM_OC2Init(TIM4,&TIM_OCInitStructure);//注意此处初始化时TIM_OC1Init而不是TIM_OCInit,否则会出错。因为固件库的版本不一样。TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable);//使能或者失能TIMx在CCR1上的预装载寄存器TIM_Cmd(TIM4,ENABLE);//使能或者失能TIMx外设TIM_SetCompare3(TIM4,1000);TIM_SetCompare2(TIM4,1100);
}继电器初始化:
#include "relay.h"void RELAY_Init()
{GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //APB2外设时钟使能 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//启动AFIO重映射功能时钟 GPIO_InitStructure.GPIO_Pin = RELAY1 | RELAY2; //选择端口号(0~15或all) GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择IO接口工作方式 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置IO接口速度(2/10/50MHz) GPIO_Init(GPIOA, &GPIO_InitStructure);//必须将禁用JTAG功能才能做GPIO使用
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable, ENABLE);// 改变指定管脚的映射,完全禁用JTAG+SW-DP
// GPIO_ResetBits(GPIOA,RELAY1 | RELAY2); //都为低电平(0) 初始为关继电器
}void RELAY_1(u8 c) //继电器的控制程序(c=0继电器放开,c=1继电器吸合)
{GPIO_WriteBit(GPIOA,RELAY1,(BitAction)(c));//通过参数值写入接口
}
void RELAY_2(u8 c)//继电器的控制程序(c=0继电器放开,c=1继电器吸合)
{ GPIO_WriteBit(GPIOA,RELAY2,(BitAction)(c));//通过参数值写入接口
}
串口那些就不用说了嘛。这是硬件篇,今天就先写到这。明天写逻辑层。