编写不易,如有转载,请声明出处:http://blog.csdn.net/zxc514257857/article/details/70160183
腾讯视频Qlv格式是一种腾讯专用的特殊的加密格式,市面上的一些格式转换软件都无法转换其格式,本方法的原理是通过合成其视频缓存文件,达到格式转化的目的
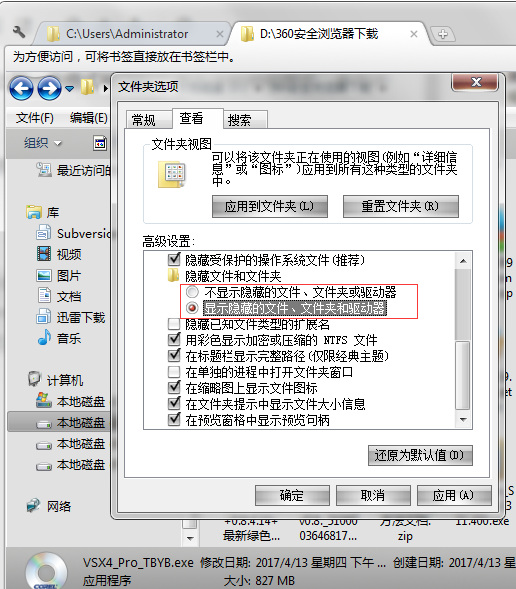
1,腾讯视频的缓存目录一般是隐藏的,需要在这里取消隐藏
2,在此目录找到缓存文件
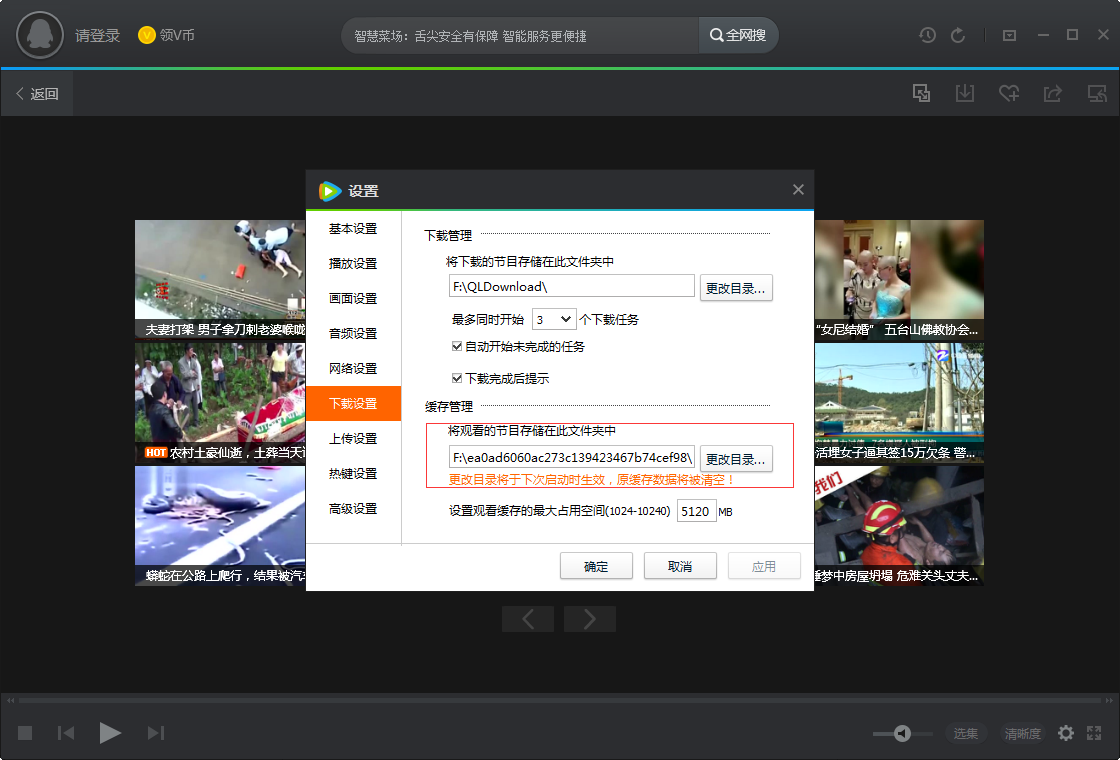
3,清空缓存文件或重新指定缓存文件路径,让一会儿生成的缓存文件夹唯一
4,下载腾讯视频客户端,搜索你要下载的视频资源,切记不要下载!!!要直接观看,且让其文件缓存完成,否则缓存文件无法生成
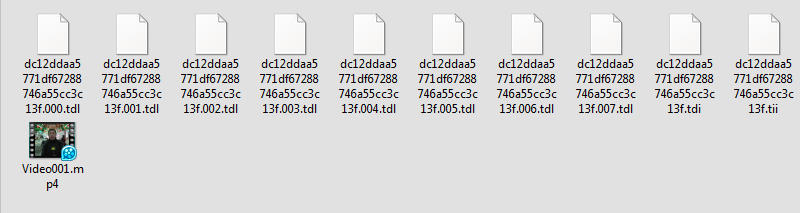
5,缓存完成后,在缓存目录中找到vodcache文件夹,在其中找到唯一的一个文件夹,打开会看到很多.tdl的文件,我们就要将这些文件合成为一个.mp4文件(后缀为tdi、tii、tpt可以无视掉)
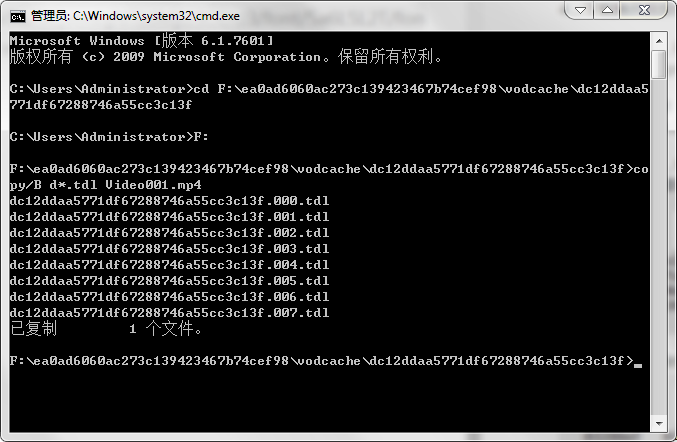
6,在开始菜单的搜索栏输入cd (空格) (.tdl的缓存文件路径) ,比如:cd F:\ea0ad6060ac273c139423467b74cef98\vodcache\dc12ddaa5771df67288746a55cc3c13f
7,接着输入F: ,最后输入转换命令copy /b 0*.tdl Video001.mp4 ,这里的0*.tdl表示匹配0开头.tdl结尾的所有文件,如果你的文件是以d开头,就需要将0改为d,比如:

8,点击回车,合成开始,出现已复制1个文件,表示此视频合成成功,在该缓存目录下可以找到此视频
9,在控制台中的操作代码如下:
因本人才疏学浅,如博客或Demo中有错误的地方请大家随意指出,与大家一起讨论,共同进步,谢谢!





