红外线接收示例
本文使用的红外接收器为:HX1738,连接方法如下
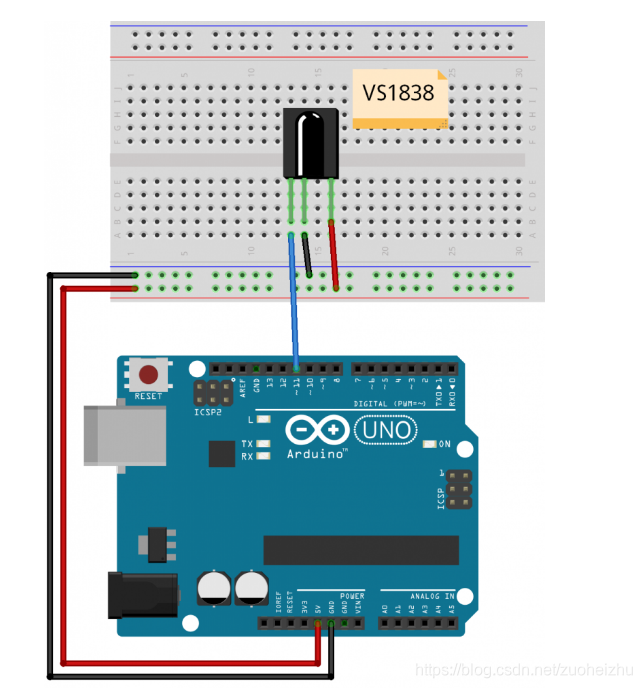
/** IRrecvDemo* =====================功能说明=====================* 演示如何利用Arduino开发板接收红外遥控器控制信号,* 并将接收到的红外遥控器信号内容通过串口监视器显示出来。* * 本程序基于Ken Shirriff开发的IRremote库。如需获得该库文件* 可前往以下网址获得:* http://arcfn.com (Ken Shirriff个人博客) * http://www.taichi-maker.com/homepage/download/ (太极创客官网)* * =====================电路连接======================* 红外接收器 1838B OUT 引脚 --- Arduino Uno 11 引脚 * 红外接收器 1838B VCC 引脚 --- Arduino Uno +5V 引脚 * 红外接收器 1838B GND 引脚 --- Arduino Uno GND 引脚 * * 如需获得详细电路连接说明图,请参阅太极创客网站:* http://WWW.TAICHI-MAKER.COM* * 此示例程序为配合太极创客制作的* 《零基础入门学用ARDUINO教程-智能应用篇》使用* */#include <IRremote.h>int RECV_PIN = 11;IRrecv irrecv(RECV_PIN); //定义接收引脚为11脚.decode_results results; //声明一个IRremote库函数独有的变量类型(decode_resultc)void setup()
{Serial.begin(9600);// 假如启动过程出现问题,提示用户启动失败Serial.println("Enabling IRin");irrecv.enableIRIn(); // Start the receiverSerial.println("Enabled IRin");
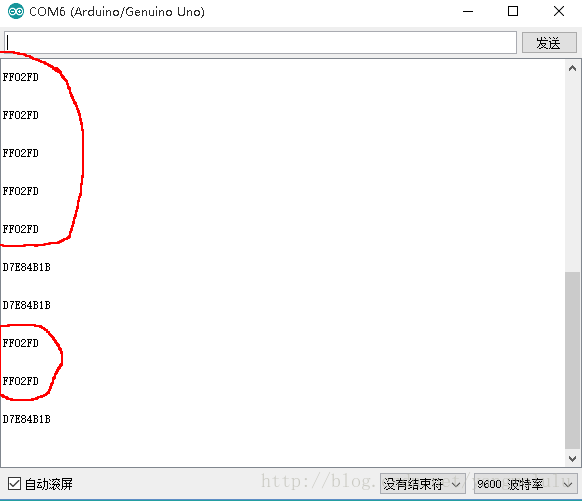
}void loop() {if (irrecv.decode(&results)) { //检查是否接收到红外遥控信号Serial.println(results.value, HEX); //输出指令信息irrecv.resume(); //接收下一指令}delay(100);
}红外线发射示例
连接方法
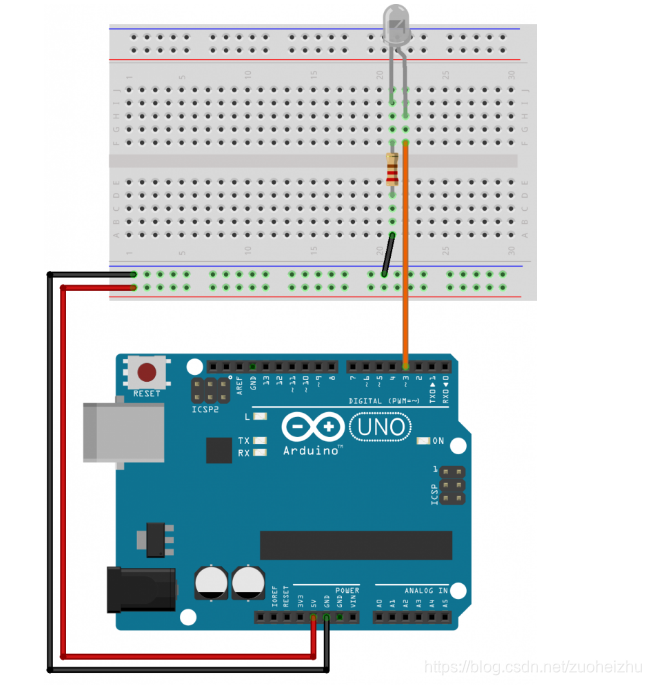
/** IRsendDemo* * =====================功能说明=====================* 利用Arduino开发板发射红外控制信号* * 本程序基于Ken Shirriff开发的IRremote库。如需获得该库文件* 可前往以下网址获得:* http://arcfn.com (Ken Shirriff个人博客)* http://www.taichi-maker.com/ (太极创客官网)* * =====================电路连接======================* 红外发射 LED 正极 --- Arduino Uno 引脚 3* 红外发射 LED 负极 --- Arduino Uno 引脚 GND* * 如需获得详细电路连接说明图,请参阅太极创客网站:* http://WWW.TAICHI-MAKER.COM* * 此示例程序为配合太极创客制作的* 《零基础入门学用ARDUINO教程-智能应用篇》使用* */#include <IRremote.h>IRsend irsend; //定义一个用于发射的元器件void setup()
{
}void loop() {for (int i = 0; i < 3; i++) { irsend.sendSony(0xa90, 12); //发射Sony红外遥控协议A90指令码delay(40);}/** * IRremote库支持NEC, Sony, Philips RC5, Philips RC6等协议指令。* 本示例程序中Arduino将通过调用函数sendSony(0xa90, 12) 来发射Sony协议指令。* 该函数的两个参数中, 0xa90为指令信息内容,12位指令信息位数。* * 假如需要发射NEC协议指令则可以调用函数sendNEC(0xF740BF, 32)。* 其中0xF740BF为指令信息内容,32位指令信息位数。* * 如果需要发射其它遥控协议指令请参考以下程序代码:* sendNEC(unsigned long data, int nbits); //发射NEC协议指令* sendSony(unsigned long data, int nbits); //发射Sony协议指令* void sendRC5(unsigned long data, int nbits); //发射Philips RC5协议指令* void sendRC6(unsigned long data, int nbits); //发射Philips RC6协议指令* void sendSharp(unsigned long data, int nbits); //发射Sharp协议指令* void sendPanasonic(unsigned int address, unsigned long data); //发射Panasonic协议指令* void sendJVC(unsigned long data, int nbits, int repeat); //发射JVC协议指令* void sendRaw(unsigned int buf[], int len, int hz); //发射原始指令*/ delay(5000); //延迟5秒
}学习型遥控器
/** 学霸型红外遥控器 * 太极创客 http://www.taichi-maker.com/* Ver. 1.2 - 01/07/2017* =====================功能说明=====================* 利用Arduino开发板记录并“重放”红外遥控信号* 用户可以使用家中控制电器用的红外遥控器对准本装置的* 红外接收器,本装置可将接收到的红外遥控信号记录至EEPROM。* 当用户按下"发射"按键时,红外LED会发射记录的红外遥控信号* 从而控制家中电器。* * 本示例程序主要内容借鉴Ken Shirriff 的 IRremote 库示例程序IRrecord。* * 本程序基于Ken Shirriff开发的IRremote库。如需获得该库文件* 可前往以下网址获得:* http://arcfn.com (Ken Shirriff个人博客)* http://www.taichi-maker.com/ (太极创客官网)* * =====================电路连接======================* 红外接收器 1838B OUT 引脚 --- Arduino Uno 引脚 11* 红外发射 LED 正极 --- Arduino Uno 引脚 3* 按键开关 --- Arduino Uno 引脚 12* * 如需获得详细电路连接说明图,请参阅太极创客网站:* http://WWW.TAICHI-MAKER.COM* * 此示例程序为配合太极创客制作的* 《零基础入门学用ARDUINO教程-智能应用篇》使用* 版本更新说明* V1.1 使用put get来 进行EEPROM存取* V1.2 针对IRrecord代码进行优化*/#include <IRremote.h>
#include <EEPROM.h>#define codeTypeEAddr 0 // 存放红外信号编码类型EEPROM地址
#define codeLenEAddr 1 // 存放红外信号编码长度EEPROM地址
#define toggleEAddr 2 // 存放红外信号RC5/RC6类型EEPROM地址
#define codeValueEAddr 3 // 存放红外信号数值EEPROM地址
#define RECV_PIN 11 // 红外接收器 OUT 引脚 --- Arduino 引脚11
#define BUTTON_PIN 12 // 按键开关 --- Arduino 引脚12
#define STATUS_PIN LED_BUILTIN // 状态显示LED --- 开发板内置LEDIRrecv irrecv(RECV_PIN); // 红外遥控接收器对象
IRsend irsend; // 红外遥控发射对象decode_results results; // 储存接收到的红外遥控信息void setup() {Serial.begin(9600);irrecv.enableIRIn(); // 启动红外接收pinMode(BUTTON_PIN, INPUT_PULLUP);pinMode(STATUS_PIN, OUTPUT);delay(10);loadEepromValues(); // 从EEPROM中读取红外信号信息(具体信息请见函数部分)
}// 红外信号存储变量
int codeType; // 红外信号编码类型
unsigned long codeValue; // 存放红外信号数值(如果不是raw型)
unsigned int rawCodes[RAWBUF]; // raw型信号
int codeLen; // 红外信号编码长度
int toggle; // 红外信号RC5/RC6类型// 记录收到的红外信号
void storeCode(decode_results *results) {codeType = results->decode_type;int count = results->rawlen;if (codeType == UNKNOWN) { //如果收到的信号是无法识别的协议,则存储为raw型数据Serial.println("Received unknown code, saving as raw"); codeLen = results->rawlen - 1;// 存储raw型信号:// 将首个数值放弃(间隙)// 将信号转化为毫秒// 细微调整信号内容,将信息变短将空档间隙变长从而取消红外接收信号的扰动for (int i = 1; i <= codeLen; i++) {if (i % 2) {// 信号rawCodes[i - 1] = results->rawbuf[i]*USECPERTICK - MARK_EXCESS;Serial.print(" m");} else {// 空档间隙rawCodes[i - 1] = results->rawbuf[i]*USECPERTICK + MARK_EXCESS;Serial.print(" s");}Serial.print(rawCodes[i - 1], DEC);}Serial.println("");}else {if (codeType == NEC) { //如果是NEC协议类型Serial.print("Received NEC: ");if (results->value == REPEAT) {// Don't record a NEC repeat value as that's useless.Serial.println("repeat; ignoring.");return;}} else if (codeType == SONY) { //如果是SONY协议类型Serial.print("Received SONY: ");} else if (codeType == PANASONIC) { //如果是PANASONIC协议类型Serial.print("Received PANASONIC: ");}else if (codeType == JVC) { //如果是JVC协议类型Serial.print("Received JVC: ");}else if (codeType == RC5) { //如果是RC5协议类型Serial.print("Received RC5: ");} else if (codeType == RC6) { //如果是RC6协议类型Serial.print("Received RC6: ");} else {Serial.print("Unexpected codeType "); //无法识别信号Serial.print(codeType, DEC);Serial.println("");}Serial.println(results->value, HEX); //输出信号数值codeValue = results->value;codeLen = results->bits;}writeEepromVal(); //将收到的信号信息储存于eeprom
}// 发射红外信号
void sendCode(int repeat) {if (codeType == NEC) { //如果是NEC协议信号if (repeat) { //且如果是发射重复信号irsend.sendNEC(REPEAT, codeLen); //发射NEC协议的重复信号Serial.println("Sent NEC repeat");} else {irsend.sendNEC(codeValue, codeLen); //否则发射NEC协议红外指令信号Serial.print("Sent NEC ");Serial.println(codeValue, HEX); //串口监视器输出红外指令信号数值}} else if (codeType == SONY) { // 发射的信号是SONY协议irsend.sendSony(codeValue, codeLen); // 发射SONY协议红外指令信号Serial.print("Sent Sony ");Serial.println(codeValue, HEX);} else if (codeType == PANASONIC) { // 发射的信号是PANASONIC协议irsend.sendPanasonic(codeValue, codeLen); // 发射PANASONIC协议红外指令信号Serial.print("Sent Panasonic");Serial.println(codeValue, HEX);}else if (codeType == JVC) { // 发射的信号是JVC协议irsend.sendJVC(codeValue, codeLen, false); // 发射JVC协议红外指令信号Serial.print("Sent JVC");Serial.println(codeValue, HEX);}else if (codeType == RC5 || codeType == RC6) { // 发射的信号是RC5或RC6协议if (!repeat) {// 新按键按下后反转toggle位toggle = 1 - toggle;}// 将toggle位放入信号代码中发送codeValue = codeValue & ~(1 << (codeLen - 1));codeValue = codeValue | (toggle << (codeLen - 1));if (codeType == RC5) { // 发射的信号是RC5协议Serial.print("Sent RC5 ");Serial.println(codeValue, HEX);irsend.sendRC5(codeValue, codeLen);} else { // 发射的信号是RC6协议irsend.sendRC6(codeValue, codeLen);Serial.print("Sent RC6 ");Serial.println(codeValue, HEX);}} else if (codeType == UNKNOWN /* i.e. raw */) {// 假设信号频率 38 KHzirsend.sendRaw(rawCodes, codeLen, 38);Serial.println("Sent raw");}
}int lastButtonState; // 此变量用于判断发射红外信号的按键开关所处的状态void loop() {int buttonState = !digitalRead(BUTTON_PIN); // 读取当前的按键开关状态(检查用户是否按下了按键开关)if (lastButtonState == HIGH && buttonState == LOW) { // 如果按键开关是被按下后再抬起的Serial.println("Released"); // 通过串口监视器输出"按键抬起"irrecv.enableIRIn(); // 启动红外接收器信号接收} if (buttonState) { // 如果按键开关处于被按下的状态Serial.println("Pressed, sending"); // 通过串口监视器输出"按键按下"digitalWrite(STATUS_PIN, HIGH); // 闪烁状态显示红外LED告知用户当前"学霸遥控器"正在发射红外信号(点亮LED)sendCode(lastButtonState == buttonState); // 更新按键开关状态变量digitalWrite(STATUS_PIN, LOW); // 闪烁状态显示红外LED告知用户当前"学霸遥控器"正在发射红外信号(熄灭LED)delay(50); // 信号发射间歇} else if (irrecv.decode(&results)) { // 如果按键开关处于没有被按下的状态,则实时检查红外接收器并对接收到的信号进行解码// 如果接收到的红外信号可以通过decode函数成功解码digitalWrite(STATUS_PIN, HIGH); // 闪烁状态显示红外LED告知用户当前"学霸遥控器"正在发射红外信号(点亮LED)storeCode(&results); // 将解码的红外信号信息进行储存(非EEPROM储存)irrecv.resume(); // 恢复红外接收器digitalWrite(STATUS_PIN, LOW); // 闪烁状态显示红外LED告知用户当前"学霸遥控器"正在发射红外信号(熄灭LED)}lastButtonState = buttonState; // 更新按键开关状态变量
}// 通过EEPROM读取红外信号信息
// 每次Arduino通电后,都会从EEPROM中读取存储的红外信号信息。
// 从而确保"学霸遥控器"在断电后依然可以保持上一次运行时所存储的
// 红外信号信息。
void loadEepromValues(){codeType = EEPROM.read(codeTypeEAddr);delay(10);codeLen = EEPROM.read(codeLenEAddr);delay(10);toggle = EEPROM.read(toggleEAddr); delay(10);toggle = EEPROM.read(toggleEAddr); delay(10);EEPROM.get(codeValueEAddr, codeValue);
}// 将红外信号信息储存于EEPROM
// 每一次"学霸遥控器"接收到新的红外遥控信号
// 都将最新接收的红外遥控器储存于EEPROM
// 从而确保信号信息不会因为Arduino断电而丢失
void writeEepromVal(){EEPROM.write(codeTypeEAddr, codeType);delay(10);EEPROM.write(codeLenEAddr, codeLen);delay(10);EEPROM.write(toggleEAddr, toggleEAddr);delay(10);EEPROM.put(codeValueEAddr, codeValue);delay(10);
}