Inverse perspective mapping
测到哪些像素坐标 ( u , v ) (u,v) (u,v) 是车道边界的一部分之后,我们现在想要知道哪些3维点 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc)对应于这些像素坐标。首先让我们再次看一下这个图像形成过程的草图:

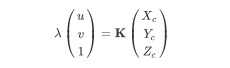
请记住:给定相机参考系中的3维点 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc),我们可以通过以下方法获得像素坐标 ( u , v ) (u,v) (u,v)
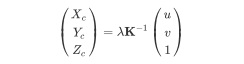
但是我们现在需要做的是解决逆问题。我们已经给出了 ( u , v ) (u,v) (u,v) ,并且需要知道 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc)。为此,我们将上面的方程式乘以:
我们的问题是我们不知道 λ λ λ 的值。这意味着对应于像素坐标的3d点 ( X c , Y c , Z c ) (X_c,Y_c,Z_c) (Xc,Yc,Zc)位于由定义的直线上的某处坐标 ( u , v ) (u,v) (u,v)
但是,哪个 λ λ λ 产生了我们图像中捕获的点呢?通常,这个问题无法回答。但是在这里,我们可以利用我们应该掌握的知识 r ( λ ) r(λ) r(λ)对应于车道边界上的一个点。我们将假设道路是平坦的。平面可以通过法向矢量 n n n和位于该平面上的某些点 r 0 r_0 r0来表征


在道路参考系中,法线向量为 n = ( 0 , 1 , 0 ) T n={(0,1,0)}^T n=(0,1,0)T。由于相机的光轴不平行于道路,相机参考系中的法向矢量为 n c = R c r ( 0 , 1 , 0 ) T n_c=R_{cr}{(0,1,0)}^T nc=Rcr(0,1,0)T,旋转矩阵 R c r R_{cr} Rcr描述了摄像机相对于道路定向:它将矢量从道路框架旋转到摄像机框架。剩下的缺失部分是平面上的某个点 r 0 r_0 r0。在相机参考系中,相机在位置 ( 0 , 0 , 0 ) T {(0,0,0)}^T (0,0,0)T.如果我们用 h h h表示摄像机在道路上方的高度,那么我们可以通过沿道路法线向量 n c n_c nc的方向移动距离为h.因此,我们选取 r 0 = h n c r_0=hn_c r0=hnc,我们的平面方程变为


现在我们可以计算线 r ( λ ) = λ K − 1 ( u , v , 1 ) T r(\lambda)={\lambda K}^{-1} {(u,v,1)}^T r(λ)=λK−1(u,v,1)T到达道路的点,通过把 r ( λ ) r(\lambda) r(λ)带入平面等式 h = n c T r h={n_c}^Tr h=ncTr

我们可以吧 λ \lambda λ的值代入 r ( λ ) r(\lambda) r(λ)来得到从像素坐标 ( u , v ) (u,v) (u,v)映射到相机参考系相应的三维坐标

仅当图像以像素坐标 ( u , v ) (u,v) (u,v)显示道路时,此方程式才成立。它可能看起来有些丑陋,但实际上很容易用python实现。
Exercise: Inverse perspective mapping
在本练习中,您将实现等式。 (7)以及摄像机参考系和道路参考系之间的坐标转换。对于后一部分,您可能会回顾“图像形成基础”。请注意,在进行本练习之前,您应该已经成功完成了《图像形成基础》中的练习。
要开始练习,请打开代码/tests/lane_detection/inverse_perspective_mapping.ipynb,然后按照该笔记本中的说明进行操作
Fitting the polynomial
我们的目标是获得多项式 y l ( x ) y_l(x) yl(x)和 y r ( x ) y_r(x) yr(x)并描述道路参考系中的左右车道边界(基于ISO 8855)。

import numpy as np
import matplotlib.pyplot as plt
从车道边界分割中,我们知道我们的语义分割模型将以摄像机图像作为输入,并返回形状为(H,W,3)的张量输出。特别是prob_left = output [v,u,1]将是像素是左车道边界的一部分的概率。我将神经网络为某些示例图像计算的张量输出[v,u,1]保存在一个npy文件中。我们来看一下
prob_left = np.load("../../data/prob_left.npy")
plt.imshow(prob_left, cmap="gray")
plt.xlabel("$u$");
plt.ylabel("$v$");

上图显示了每个(u,v)的prob_left [v,u]。现在想象一下,而不是三元组(u,v,prob_left [v,u]),我们将有三元组(x,y,prob_left(x,y)),如图18所示,这是道路上的坐标。这些三元组可以针对prob_left [x,y]大的所有(x,y,prob_left [x,y])过滤掉。我们将获得属于左车道边界的点的列表,并可以使用这些点来设置多项式!但是,从(u,v,prob_left [v,u])转到(x,y,prob_left [x,y])实际上并不难,因为在上一练习中实现了uv_to_roadXYZ_roadframe_iso8855函数。此函数转换为(请注意,对于道路像素)
import sys
sys.path.append('../../code')
from solutions.lane_detection.camera_geometry import CameraGeometry
cg = CameraGeometry()
xyp = []
for v in range(cg.image_height):
for u in range(cg.image_width):
X,Y,Z= cg.uv_to_roadXYZ_roadframe_iso8855(u,v)
xyp.append(np.array([X,Y,prob_left[v,u]]))
xyp = np.array(xyp)
这个double for循环非常慢,但是请放心。 xyp数组的前两列与prob_left无关,因此可以进行预先计算。可以不使用for循环来计算最后一列:xyp [:,2] == prob_left.flatten()。您将在练习中进行预计算。
为了将自己限制为具有较大prob_left [x,y]的三元组(x,y,prob_left [x,y]),我们可以创建一个蒙版。然后,我们可以将屏蔽的x和y值插入numpy.polyfit()函数,以最终获得所需的多项式。 numpy.polyfit()执行最小二乘。但是,如果我们传递一系列权重,它甚至可以进行最小二乘加权。我们只将概率值作为权重传递,因为高概率的(x,y)点应该被加权
x_arr, y_arr, p_arr = xyp[:,0], xyp[:,1], xyp[:,2]
mask = p_arr > 0.3
coeffs = np.polyfit(x_arr[mask], y_arr[mask], deg=3, w=p_arr[mask])
polynomial = np.poly1d(coeffs)
Let’s plot our polynomial:
x = np.arange(0,60,0.1)
y = polynomial(x)
plt.plot(x,y)
plt.xlabel("x (m)"); plt.ylabel("y (m)"); plt.axis("equal");

Encapsulate the pipeline into a class
现在,您已经看到了车道检测管道的两个步骤:车道边界分割和多项式拟合。为了将来使用,将整个管道封装到一个类中很方便。在下面的练习中,您将实现这样的LaneDetector类。现在,让我们看一下实际应用中的LaneDetector的示例解决方案。首先,我们加载一张图片
import cv2
img_fn = "images/carla_scene.png"
img = cv2.imread(img_fn)
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
plt.imshow(img);

现在,我们导入LaneDetector类并创建一个实例。为此,我们指定了使用pytorch的save函数存储的模型的路径
from solutions.lane_detection.lane_detector import LaneDetector
model_path ="../../code/solutions/lane_detection/best_model_multi_dice_loss.pth"
ld = LaneDetector(model_path=model_path)
从现在开始,我们可以将任何图像传递给ld实例,以获取任何图像的车道边界多项式(与训练集的差别不大)。
poly_left, poly_right = ld(img)
在Google Colab上,此调用大约需要45毫秒。对于实时应用程序来说,这还不够好,在实时应用程序中,您期望的时间为10-30毫秒或更短,但是已经接近了。该样本解决方案的瓶颈是神经网络。也许您实施了一个更有效的方法?如果要使系统更快,还可以考虑在训练和推理期间将较低分辨率的图像馈入网络。这将牺牲准确性与速度。如果您尝试一下,请让我知道它的效果如何;)
现在让我们看一下ld计算出的多项式
x = np.linspace(0,60)
yl = poly_left(x)
yr = poly_right(x)
plt.plot(x, yl, label="yl")
plt.plot(x, yr, label="yr")
plt.xlabel("x (m)"); plt.ylabel("y (m)");
plt.legend(); plt.axis("equal");

这看起来很合理。在下一个练习中,您将创建一个类似的图,并将其与来自模拟器的地面真实数据进行比较。
Exercise: Putting everything together
对于最终练习,您将实现多项式设置,然后将整个管道封装到LaneDetector类中。
首先,请转到code / tests / lane_detection / lane_detector.ipynb并按照说明进行操作。