本篇博客介绍了使用射线法判断点在多边形内部还是外部的算法,并通过C++做了具体实现
1. 算法思路
判断平面内点是否在多边形内有多种算法,其中射线法是其中比较好理解的一种,而且能够支持凹多边形的情况。该算法的思路很简单,就是从目标点出发引一条射线,看这条射线和多边形所有边的交点数目。如果有奇数个交点,则说明在内部,如果有偶数个交点,则说明在外部。
如下图所示:射线和多边形一共有5个交点,为奇数,所以点在多边形内

2. 算法步骤
2.1 已知点point(x,y)和多边形Polygon的点有序集合(x1,y1;x2,y2;….xn,yn;);
以point为起点,以无穷远为终点作平行于X轴的射线line(x,y; -∞,y);循环取得多边形的每一条边side(xi,yi;xi+1,yi+1):
2.2. 判断point(x,y)是否在side上,如果是,则返回true。
2.3. 判断line与side是否有交点,如果有则count++。判断交点的总数count,如果为奇数则返回true,偶数则返回false。
2.4 判断交点的总数count,如果为奇数则返回true,偶数则返回false。
极端情况需要注意:当射线line经过的是多边形的顶点时,判断就会出现异常情况。针对这个问题,由于多边形的每一个顶点都在两个线段上,可以根据线段的两个端点的y坐标做上下判断,y值较大的顶点称为上端点,y值较小是下端点。如果射线经过上端点,count加1,如果经过下端点,则count不必加1,如下图
第一个图,交叉点为X,先计算线段(p1,p2),由于经过的是p2,即下端点,count值不加;再计算线段(p2,p3),由于经过的是p2,也是下端点,count值还是不加,总结:射线和 多边形一共有1个交点,为奇数,所以A在多边形内
第二个图,交叉点为X,先计算线段(p1,p2),由于经过的是p2,即上端点,count值加1;再计算线段(p2,p3),由于经过的是p2,也是上端点,count值加1,总结:射线和 多边形一共有3个交点,为奇数,所以A在多边形内

3. 实现代码
#include<iostream>
#include <cmath>
#include <vector>
#include <algorithm>
using namespace std;// 浮点数最小精度
#define EPSILON 0.000001// 向量(也可用来表点)
struct Vec2d
{double x, y;Vec2d(){x = 0.0;y = 0.0;}Vec2d(double dx, double dy){x = dx;y = dy;}void Set(double dx, double dy){x = dx;y = dy;}
};// 判断点在线段上
// (px0, py0) : 点坐标
// (px1, py1) : 边的第一个点
// (px2,py2) : 边的第二个点
bool IsPointOnLine(double px0, double py0, double px1, double py1, double px2, double py2)
{bool flag = false;double d1 = (px1 - px0) * (py2 - py0) - (px2 - px0) * (py1 - py0);if ((abs(d1) < EPSILON) && ((px0 - px1) * (px0 - px2) <= 0) && ((py0 - py1) * (py0 - py2) <= 0)){flag = true;}return flag;
}// 判断两线段相交
// (px1, py1) : 第一边的第一个点
// (px2, py2) : 第一边的第二个点
// (px3, py3) : 第二边的第一个点
// (px4, py4) : 第二边的第二个点
bool IsIntersect(double px1, double py1, double px2, double py2, double px3, double py3, double px4, double py4)
{bool flag = false;double d = (px2 - px1) * (py4 - py3) - (py2 - py1) * (px4 - px3);if (d != 0){double r = ((py1 - py3) * (px4 - px3) - (px1 - px3) * (py4 - py3)) / d;double s = ((py1 - py3) * (px2 - px1) - (px1 - px3) * (py2 - py1)) / d;if ((r >= 0) && (r <= 1) && (s >= 0) && (s <= 1)){flag = true;}}return flag;
}// 判断点是否在多边形内(点在多边形的边上也算在内部)
// (x, y) : 点坐标
// POL : 多边形的各个点(需连续,顺时针/逆时针皆可)
bool Point_In_Polygon_2D(double x, double y, const vector<Vec2d>& POL)
{bool isInside = false;int count = 0;// 求出多边形的最小Xdouble minX = DBL_MAX;for (int i=0; i<POL.size(); i++){minX = std::min(minX, POL[i].x);}double px = x;double py = y;// 负X方向的水平射线,(x,y)做起点,(minX, y)做终点double linePoint1x = x;double linePoint1y = y;double linePoint2x = minX - 10; double linePoint2y = y;// 遍历每一条边for (int i = 0; i < POL.size()-1; i++){double cx1 = POL[i].x; // 多边形的第i个点double cy1 = POL[i].y; double cx2 = POL[i+1].x;// 多边形的第i+1个点double cy2 = POL[i+1].y;// 点在多边形上,算是在内部if (IsPointOnLine(px, py, cx1, cy1, cx2, cy2)){return true;}// X方向水平的边,不用计算,肯定不会和射线相交if (fabs(cy2 - cy1) < EPSILON){continue;}// 多边形的一个顶点在射线上,且该顶点是上顶点(y值较高),算一个交点if (IsPointOnLine(cx1, cy1, linePoint1x, linePoint1y, linePoint2x, linePoint2y)){if (cy1 > cy2){count++;}}// 多边形的一个顶点在射线上,且该顶点是上顶点(y值较高),算一个交点else if (IsPointOnLine(cx2, cy2, linePoint1x, linePoint1y, linePoint2x, linePoint2y)){if (cy2 > cy1){count++;}}// 已经排除平行的情况,其他相交的都算一个交点else if (IsIntersect(cx1, cy1, cx2, cy2, linePoint1x, linePoint1y, linePoint2x, linePoint2y)) {count++;}}// 交点数为奇数,则在多边形内,反之在多边形外if (count % 2 == 1){isInside = true;}return isInside;
}int main()
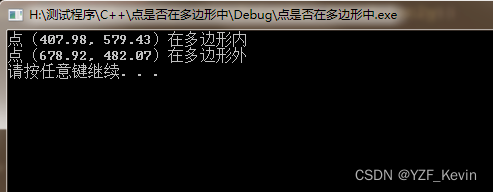
{//定义一个多边形(六边形)vector<Vec2d> POL;POL.push_back(Vec2d(268.28, 784.75));POL.push_back(Vec2d(153.98, 600.60));POL.push_back(Vec2d(274.63, 336.02));POL.push_back(Vec2d(623.88, 401.64));POL.push_back(Vec2d(676.80, 634.47));POL.push_back(Vec2d(530.75, 822.85));POL.push_back(Vec2d(268.28, 784.75)); //将起始点放入尾部,方便遍历每一条边//if (Point_In_Polygon_2D(407.98, 579.43, POL)){cout << "点(407.98, 579.43)在多边形内" << endl;}else{cout << "点(407.98, 579.43)在多边形外" << endl;}//if (Point_In_Polygon_2D(678.92, 482.07, POL)){cout << "点(678.92, 482.07)在多边形内" << endl;}else{cout << "点(678.92, 482.07)在多边形外" << endl;}system("pause");return 0;
}4. 执行结果

![洛谷 P2900 [USACO08MAR]Land Acquisition G —— 斜率优化](https://img-blog.csdnimg.cn/20201109200002384.png?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L3RpYW55aXpoaWNoZW5n,size_16,color_FFFFFF,t_70#pic_center)

![P2900 [USACO08MAR]土地购买Land Acquisition G](https://img-blog.csdnimg.cn/20210214191218918.png)
