2020年10月14日,大疆发布了禅思L1(如图1所示),命名为“DJI L1”,本文中简称“L1”。大疆官网中描述到“L1 集成 Livox 激光雷达模块、高精度惯导、测绘相机、三轴云台等模块,搭配经纬 M300 RTK 和大疆智图,形成一体化解决方案,轻松实现全天候、高效率实时三维数据获取以及复杂场景下的高精度后处理重建。”。L1的发布引起了业界极大的关注,相关推文发布的瞬间点击量迅速超过了20万+。目前,L1已于2021年5月24日正式发售。
从2020年10月14日到正式发售这个期间,大疆组织相关单位和人员进行了密集的内部测试。期间,我们有幸拿到了部分测试数据。大疆总部、北京天弘基业科技发展有限公司、山西文达通信息技术有限公司、天津融汇测绘科技有限公司、南京韦博智控科技有限公司、济南赛尔无人机科技有限公司、安徽博冠电子科技有限公司、内蒙古玉衡电子科技有限公司、云南新坐标测绘仪器有限公司均提供了大量测试数据,我们见证了L1的测试、迭代历程。我们使用自主研发的、完全具有国产自主知识产权的“点云催化剂”(旗舰版)、“点云智绘”(专业版)软件对这些数据进行了全面的处理、分析,积累了丰富的L1及其点云处理的经验。现在,根据我们的经验和知识,将L1及其点云的特性给大家进一步做一下分享。

图1大疆禅思L1
1、密
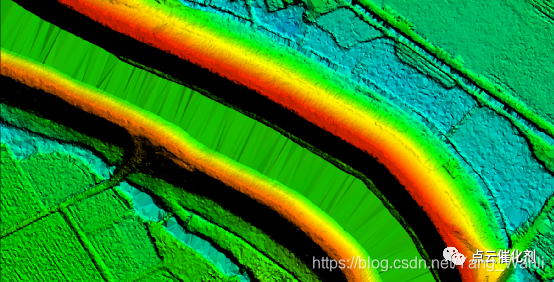
点云密度高。在有效飞行高度内,获取的点云密度最低也能优于100点/平方米;在航高较低、飞行速度较慢的情况下,获取的点云密度可高达1000点/平方米以上。图2展示了由北京天弘基业科技发展有限公司提供的天津市某局部区域的L1高密度点云,密度优于1000点/平方米。
(a)全局点云示意图
 (b)局部放大图
(b)局部放大图
图2北京天弘基业使用L1获取的天津市某区域的高密度点云(点云密度1345点/平方米)
2、大
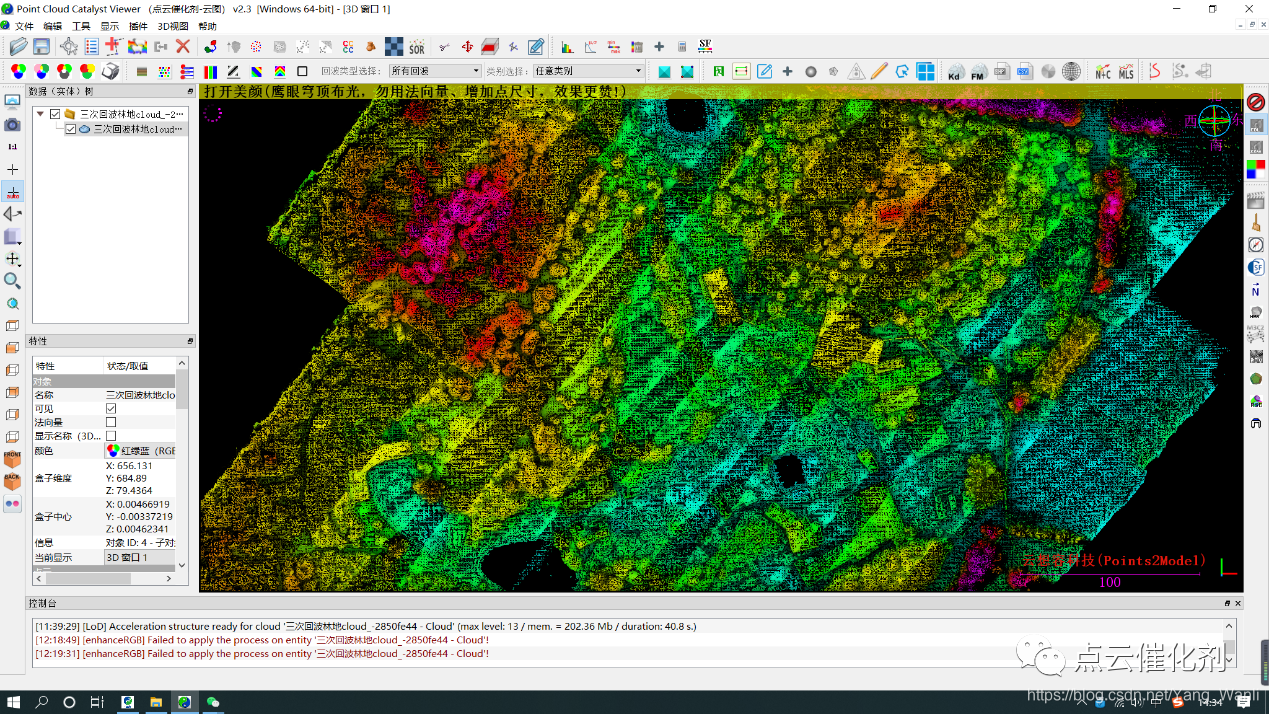
①点云数据量大。由于点云密度大,在同等面积的情况下,L1获取点云的数据量显著大于其他设备获取的中低密度的点云数据量。如图3所示,L1获取的某丘陵地区的点云密度为697点/平方米,在有效面积为0.592平方公里的情况,las1.2格式点云数据大小为14.2G、包含426421871个点。②反射强度特征信息量大。L1获取点云的反射强度分布范围宽泛,不同地物的反射强度差异大,反射强度用于地物识别的可靠性大,如图3(d)所示。图3(b)和(c)分别显示了融合反射强度的高程着色信息、未融合反射强度的高程着色信息,可见L1反射强度的加入显著的增加了点云的信息量、可判读性和应用价值。

(a)真彩色的RGB点云
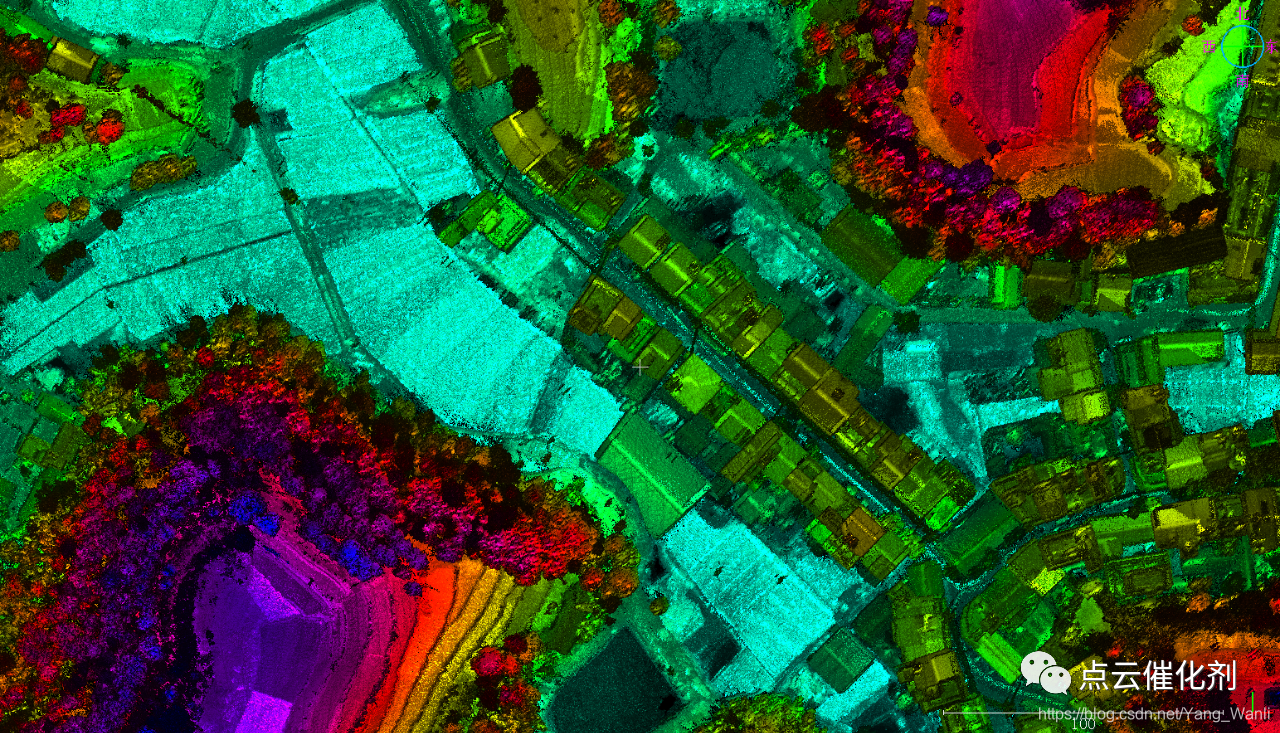
(b)融合反射强度与高程的局部点云可视化

(c)按高程着色的局部点云可视化

(d)与(b)对应的反射强度信息可视化
图3使用 L1获取的丘陵区域高密度点云(点云密度697点/平方米)
3、准
**定位准。**点云三维坐标精度高、地理定位准。北京天弘基业科技发展有限公司在河北组织的实测数据表明,L1点云的水平精度优于5厘米,高程精度优于2.6厘米。
4、强
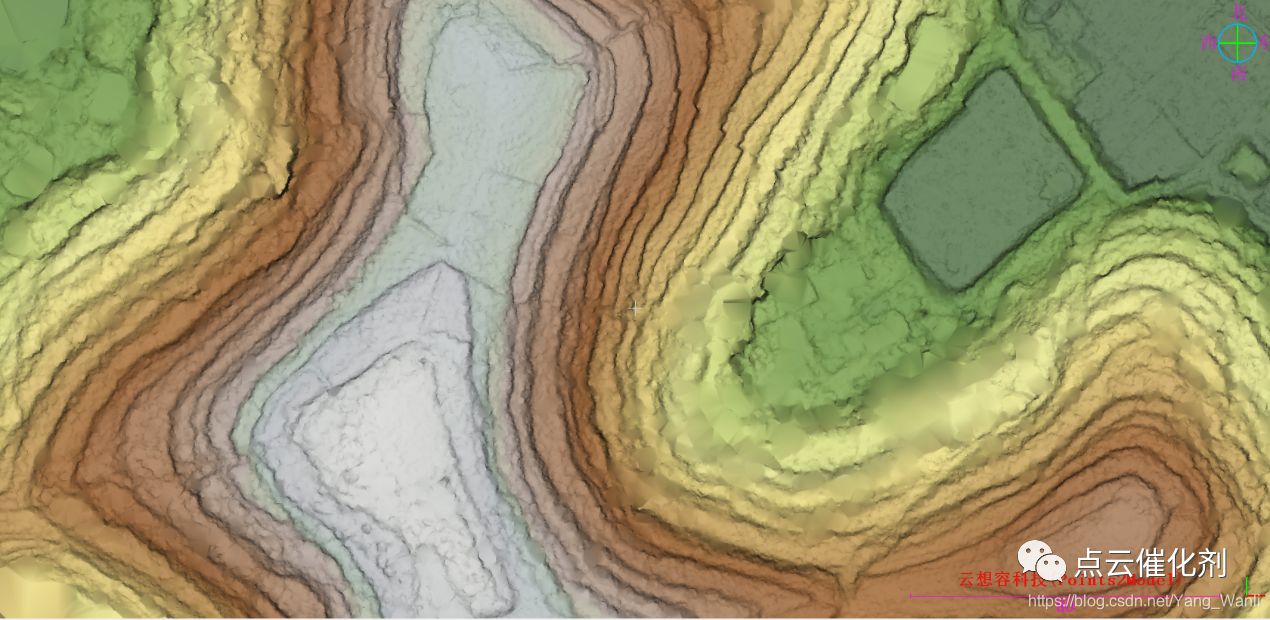
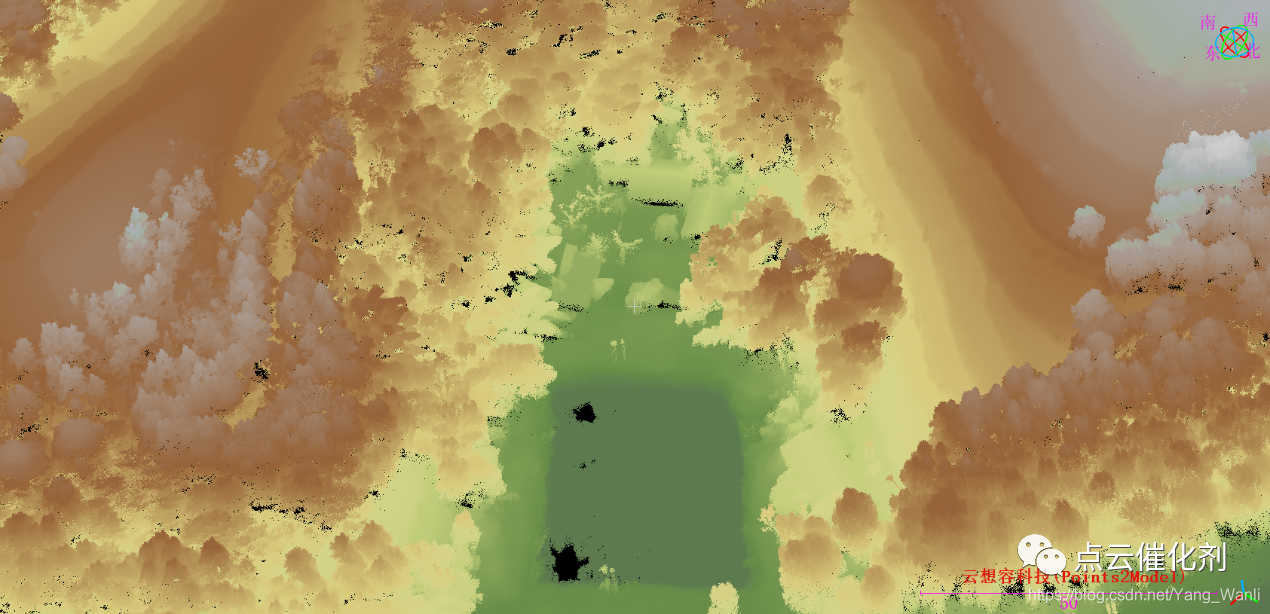
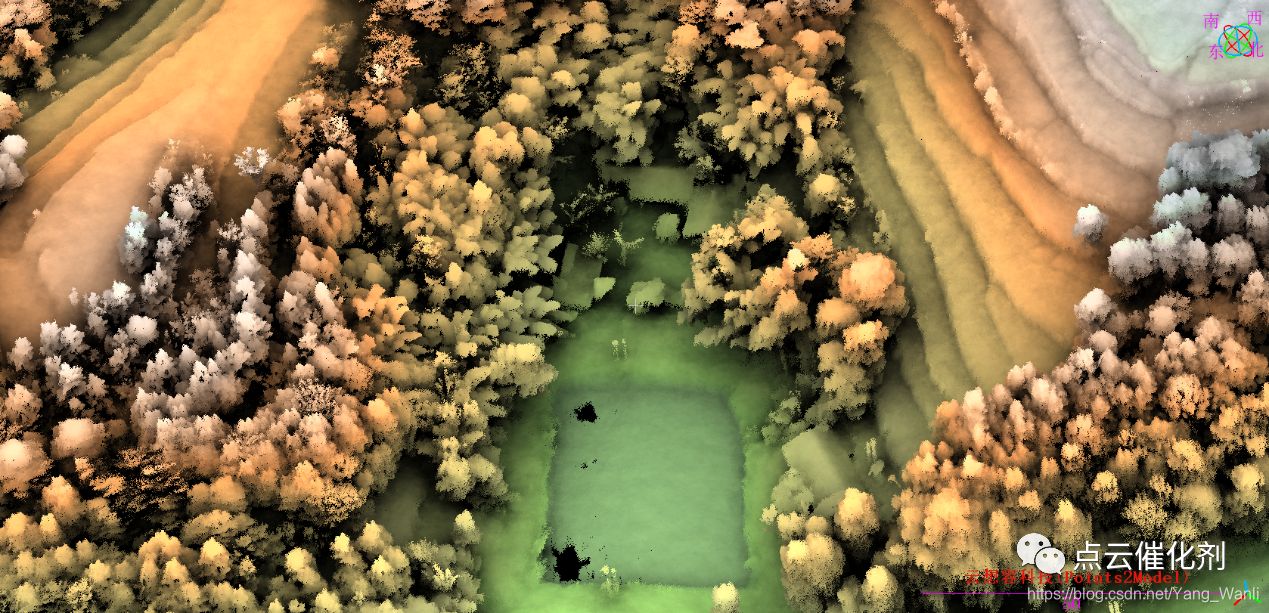
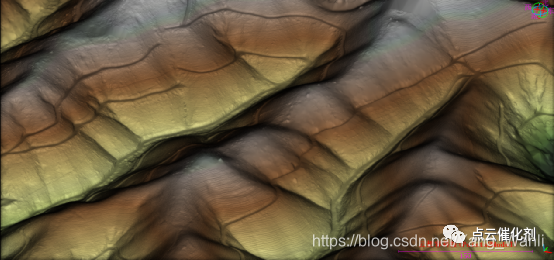
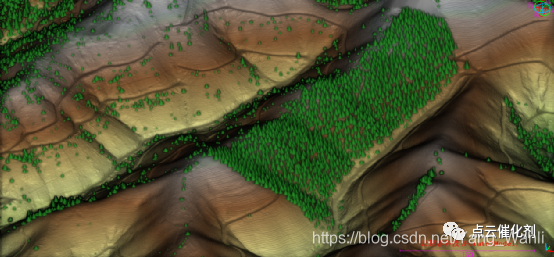
**激光穿透能力强。**对茂密的植被具有较强的穿透性,可以获取较好的树冠三维形态和较密的林下地形信息。图4展示了与图3相同区域的点云数据,该区域内分布着大量树木。我们通过全自动的滤波处理,获取了该点云数据的数字高程模型(DEM),该DEM准确的反映了林下地形信息,可见L1具有良好的植被穿透能力。必须注意的,此处的强是穿透能力强、并不是激光能量极强。
5、安
**① L1的激光是人眼安全。**用户可以放心使用。**②安全。**与大疆经纬M300搭配,飞行安全和设备安全有极大的保障。
6、 全
①全天时。L1可以不分昼夜作业,可以极大的拓展作业时间。南京韦博智控科技有限公司基于同样的规划航线,利用L1同时获取了昼夜两个时相的点云,两个点云高度一致。②全方位。L1配备了三轴平台,可获取任意拍摄角度点云。南京韦博智控科技有限公司利用L1获取了广西左江花山岩画整个崖体完整的立面点云,并进行了花山岩画的三维重建,建立了该文化遗产的数字档案。
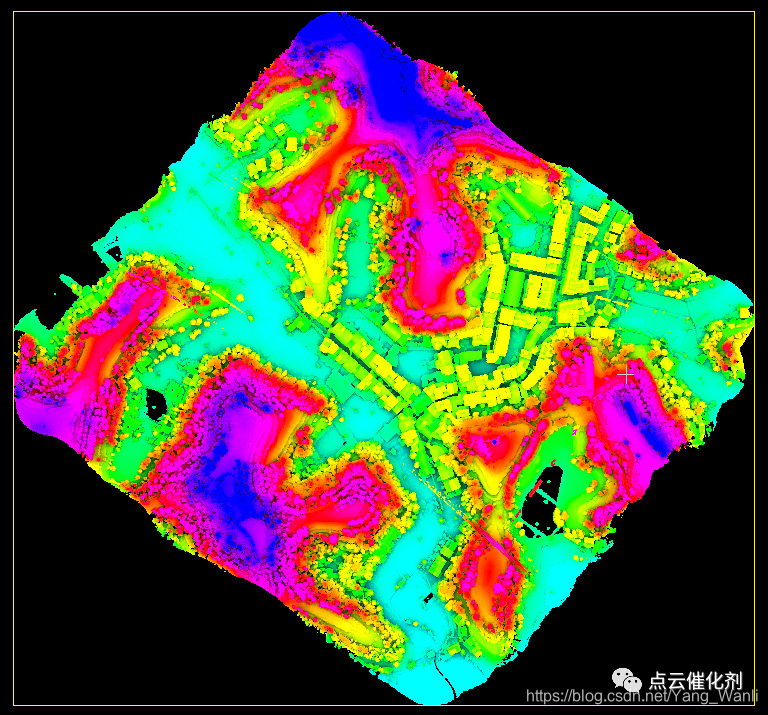
(a)按高程着色的整个测区点云可视化
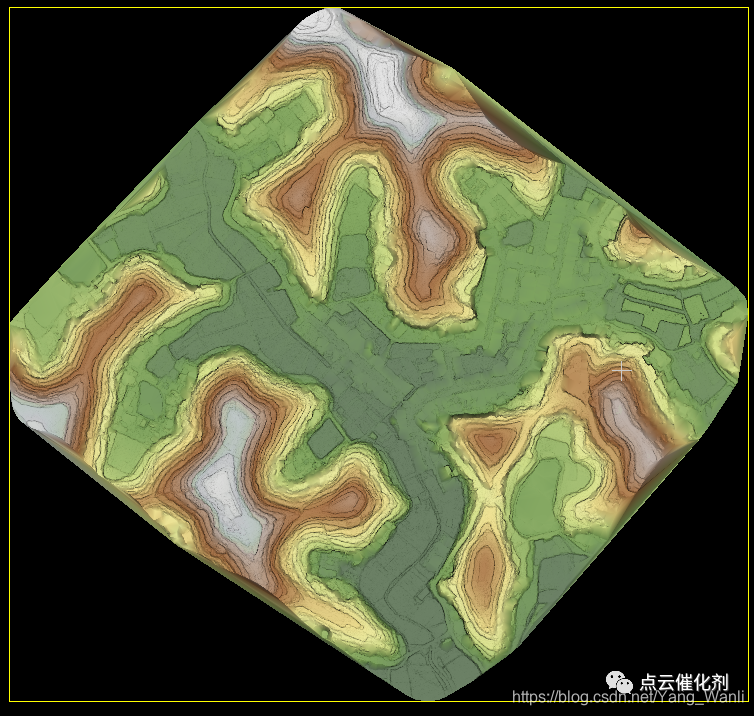
(b)经过点云滤波后利用地面点生成的DEM
(c)按高程着色的局部区域点云可视化
(d)经过点云滤波后利用地面点生成的DEM
图4 L1点云可获取高分辨率的林下地形信息
7、彩(确)
彩色点云让人感觉千真万确。L1采用了激光与可见光融合解决方案,可以同步获取点云与可见光光学影像,并最终输出真彩色点云。图3(a)展示了某一真彩色的点云的可视化效果,实现了LiDAR点云与人类视觉感知的有机统一。
8、真
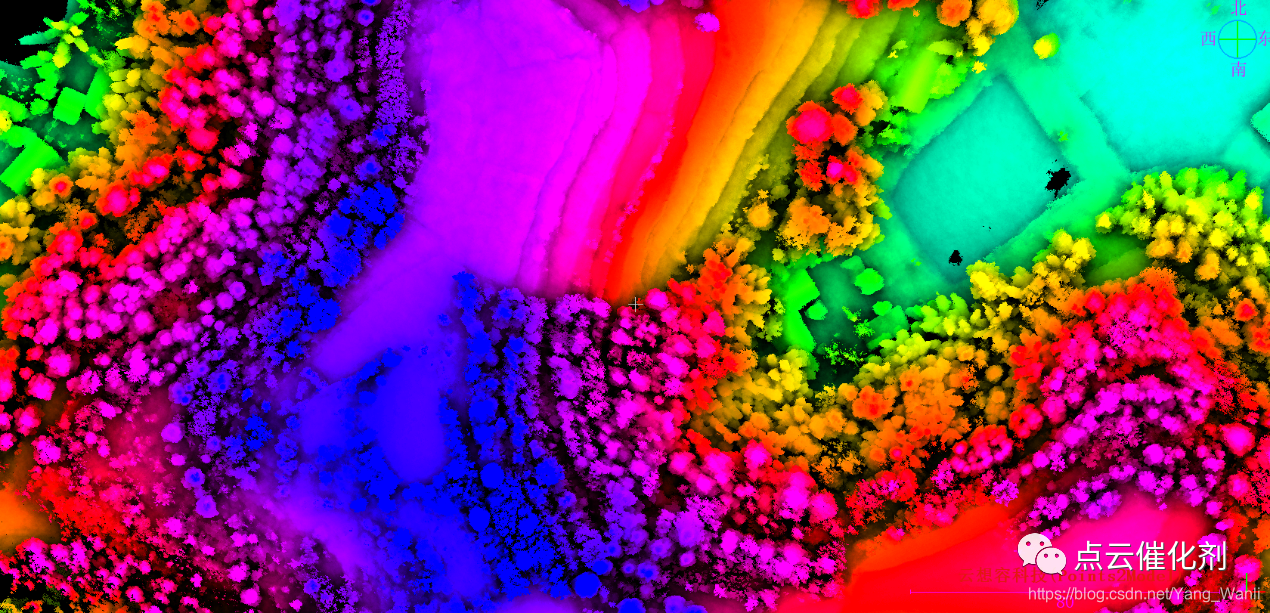
真三维。**激光雷达点云的三维特性使其备受关注。但是,随着点云精度的提升和点云密度的升高,点云的真三维特性更加突出,如图5和图6所示。图5中展示了点云中增加真三维特性前后的显示效果差异,图5(a)与(b)使用了了相同的配色方案、但图5(b)增加了真三维特性,因此图5(b)的可视化效果好。图6展示了对图3(a)中RGB点云进行真三维增强后的效果。真三维特性是基于三维点云计算出的一种新特性,而且点云越密、精度越高,真三维效果越好,可视化效果越好。
(a)按高程着色的点云
(b)融合真三维特性与高程的点云可视化效果
图5L1点云真三维特性突出

(b)整体可视化效果
(b)局部可视化效果
图6真三维增强后的RGB点云
9、美
点云美观、颜值美。由于密,真三维特性更加突出,配合计算机视觉算法的优化和电脑显卡性能增强,可以渲染出更美的点云,如图7所示。
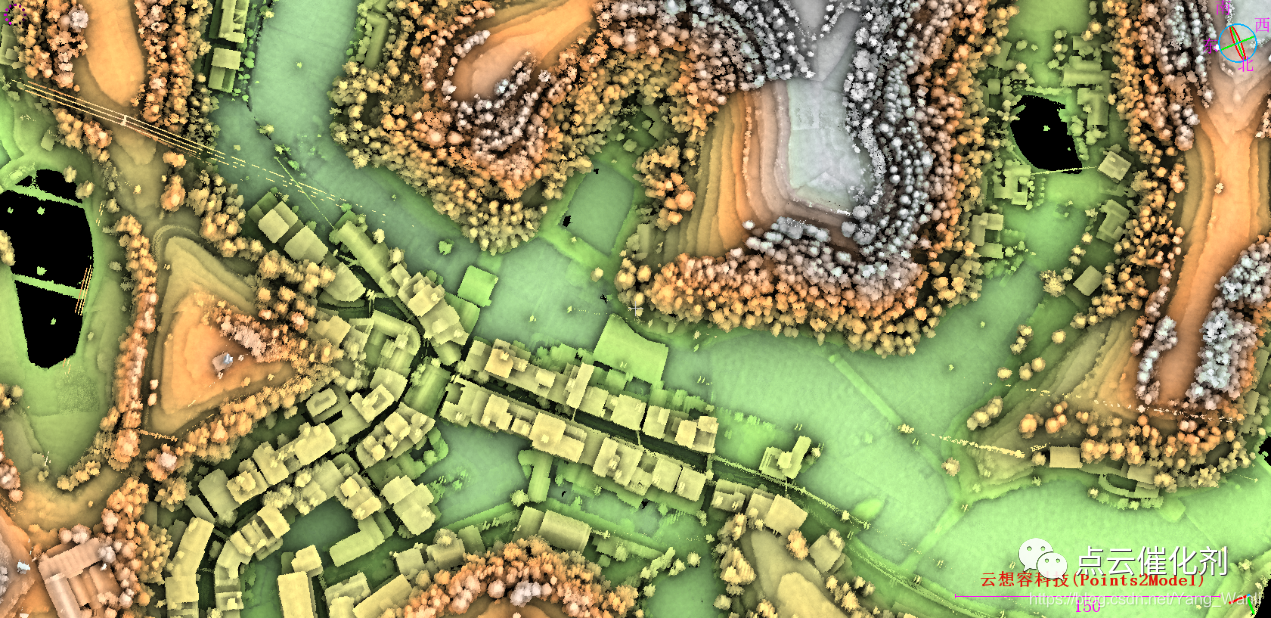
图7点云之美
10、整
点云具有高度的整体性、完整性。①整体一致性。L1仍然是按航带组织的点云数据,但用户无需关心航带平差问题,用户拿到的点云已经是大疆智图做过条带平差后输出的整体一致性高的点云。②完整性。L1自带云台,允许用户设置激光雷达扫描仪视准轴的倾斜角度以方便用户开展倾斜扫描、获取被测地物的立面信息,立面点云数据的增加提高了点云数据的完整性。
11、洁
点云粗差点少、让人感觉整洁。大疆智图输出的L1点云已经经过了去燥处理,用户拿到的L1点云中已经鲜有粗差点。存在粗差点的情况下,会导致后续的自动处理的效果较差;而人工剔除粗差点又耗时、费力。目前,干净、整洁的L1点云为后续点云处理和分析奠定了良好的数据基础。
12、快
**①机上点云可以实时回传。②数据获取效率高、速度快。**电网部门组织的测试表明,利用L1进行电力巡线,一架次可以获取10km的点云数据(平均档距400m、25档),8小时内可以获取 80km的电力线路点云数据。
13、远
L1测距远。L1的 测量距离 450 m (反射率 80%,0 klx) / 190 m (反射率 10%,100 klx)。
14、高
①点频高。单回波可达24万点/秒;多回波可达48万点/秒。②搭载L1的无人机可以飞的高。搭载L1的无人机的有效航高可以分布在50m-190m之间,无人机飞的越高越可以增加航带宽度和覆盖范围。③集成度高。激光雷达扫描仪与光学相机无缝集成,实现了点云与影像的自动配准与点云自动赋色。
15、精
①L1做工精致。大疆产品一贯的精致,L1更是如此。②浓缩的精华。重量轻,只有900g左右,留下的都是精华呀。
16、智
智能化高。搭配大疆智图软件进行 POS 解算、点云与可见光数据融合、模型生成、作业报告输出,实现后处理一键式操作,具有高度的自动化、智能。
17、多
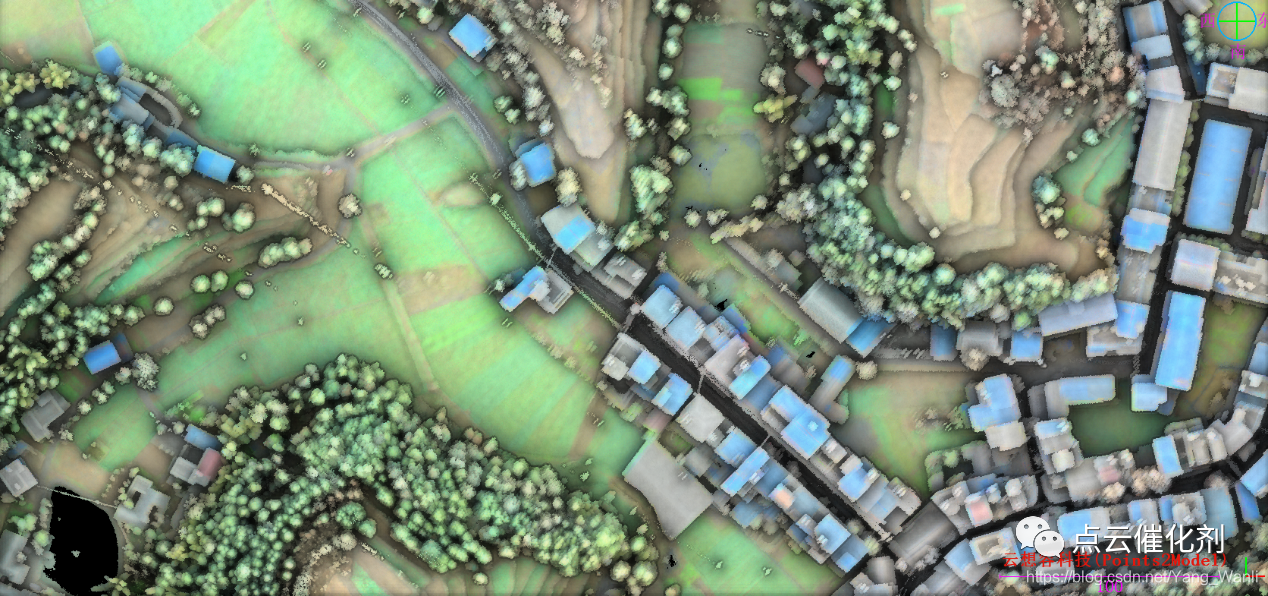
**回波多、应用多。①多回波。L1支持 3 次回波。②用处广、用途多、产品多。**在地形测绘、电力巡线、林业资源调查、河道测量、地表覆盖分类、建筑物三维重建等方面有广泛应用,部分成果如图8所示。
(a)DEM
(b)单木分割的重建结果叠加到DEM上
(c)河道DEM

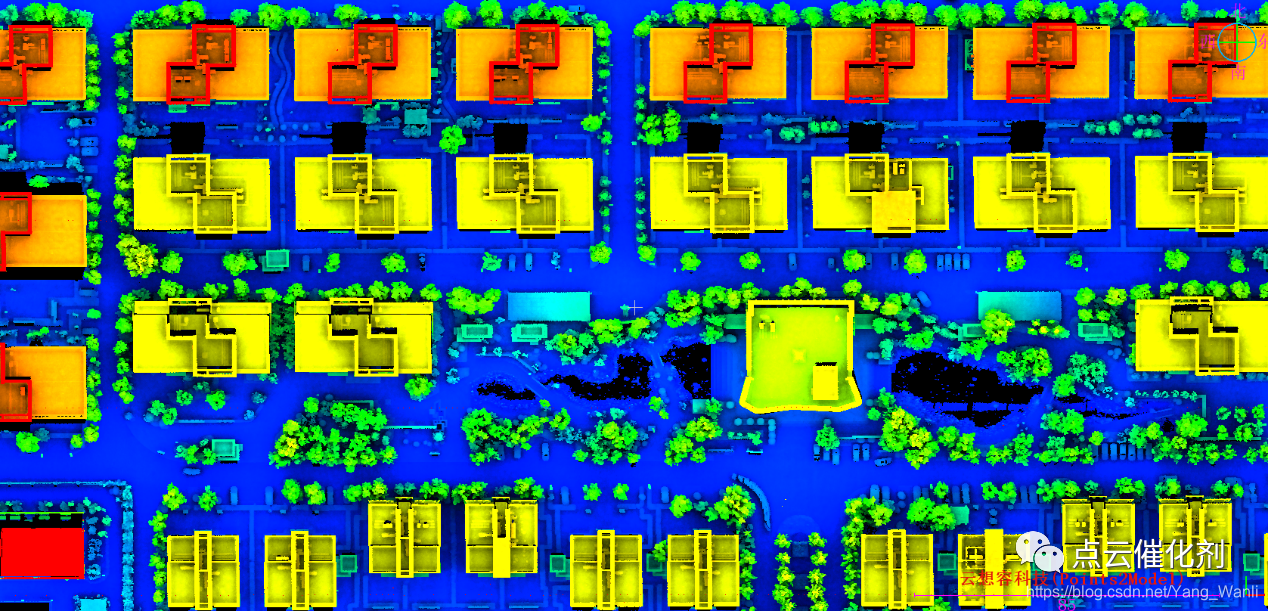
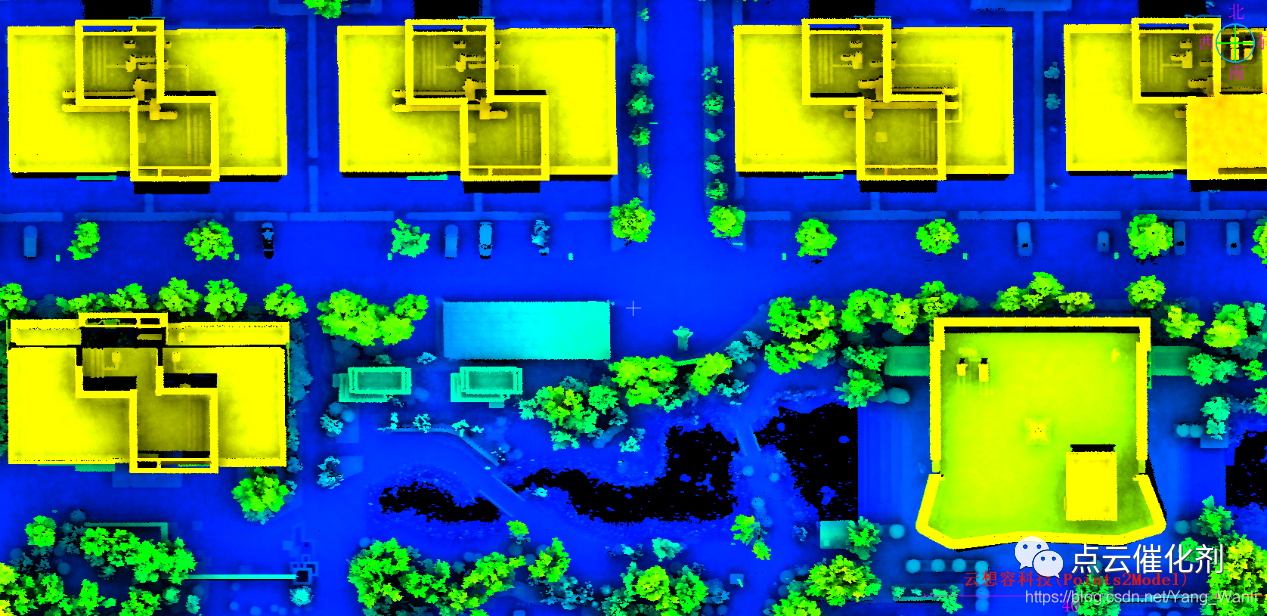
(d)城区点云分类结果

(e)丘陵区与点云分类结果
图8形式多样的成果
18、省
人力、物力、时间、金钱成本节省。使用大疆禅思L1却可以轻松的获取密度在100-1000个点/平方米的点云,其裸机单价却在8万元以下。搭载L1的无人机价格也很亲民。再考虑到其便携性、高效的获取速度、高度集成的一体化点云和影像融合方案,这使L1无论性价比还是做科研和工程,都特别平民化。
上述18个字可以组合为9个词,“高远、强大、致(同“智”)密、精美、多彩、准快、整洁、安全、真省”。如果概括为一个字,就是“好”。