文章目录
- 前言
- 一、硬件选择与连接
- 1. STM32F103C8T6最小系统板
- 2. L298N双路电机驱动
- 3. 红外循迹模块
- 二、环境配置
- 1. Device
- 2. Output
- 3. C/C++
- 4. Debug
- 三、项目管理与代码实现
- 1. 项目结构
- 2. 工程管理
- 3. 具体文件
- xunji.c
- xunji.h
- main.c
- 总结
- 项目源码
前言
这篇文章我主要讲的是让基于stm32单片机下的智能小车实现红外循迹功能,智能小车的项目非常多,比如说循迹避障、蓝牙遥控、视觉控制等等,我将会一步一步带大家走进stm32单片机的项目当中。
项目源码置文章底部,可自提
一、硬件选择与连接
在硬件部分,与前几节我所介绍的51智能小车大致一样,所不同的是把51最小系统板换成了stm32最小系统板,其他驱动、红外循迹模块都一样,具体可前往【51单片机实例】智能小车(一)了解详情。
下面我还是会对相关重要模块进行简单介绍:
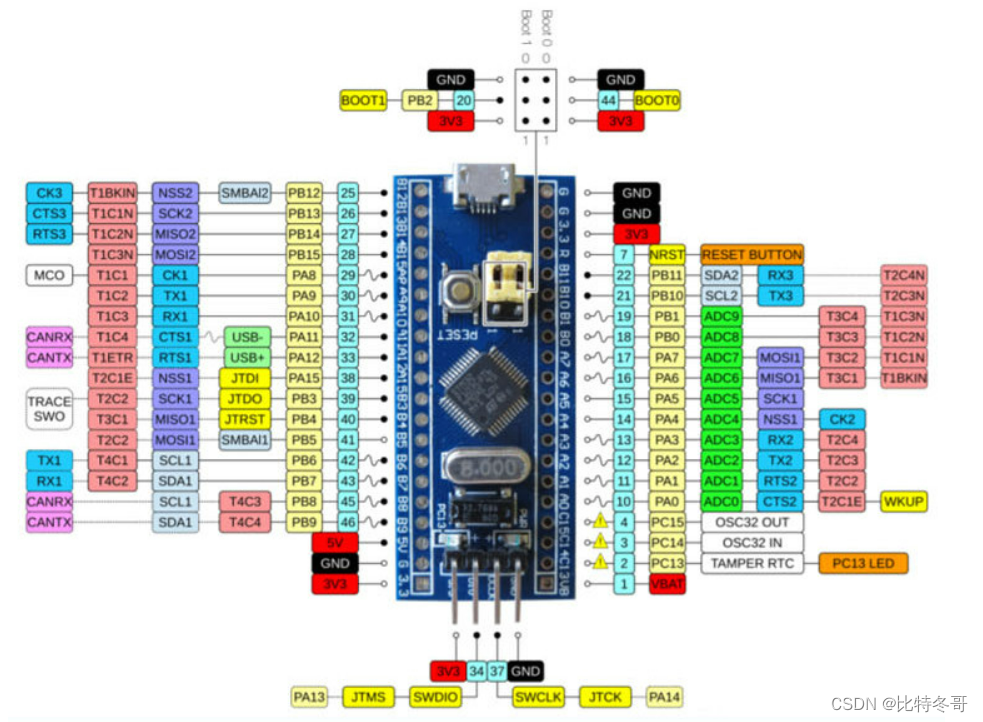
1. STM32F103C8T6最小系统板
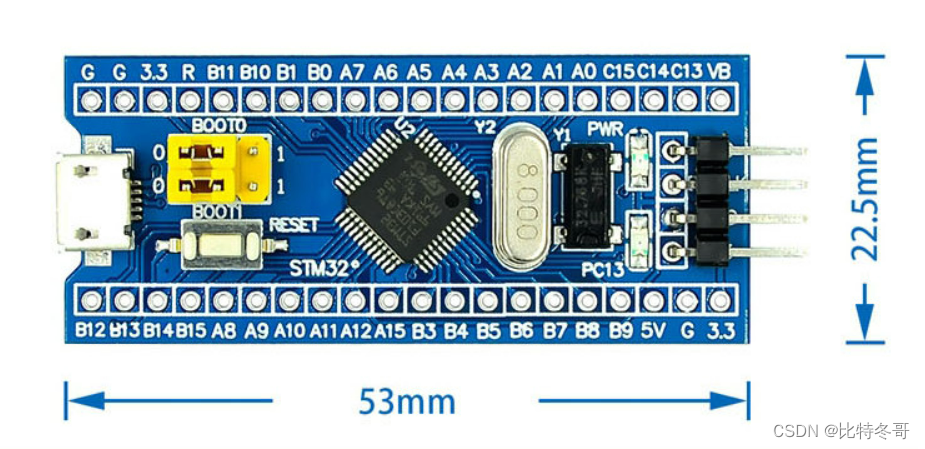
配套资源:
- STM32F103C8主芯片一片
- 贴片8M晶振(通过芯片内部PLL最高达72M)ST官方标准参数
- 3.3V稳压芯片,最大提供800mA电流
- 一路miniUSB接口,可以给系统版供电,预留USB通讯功能
- 复位按键
- 标准SWD口一个,支持JLink,STLink,JLINK OB
- BOOT选择端口
- IO扩展排针 20pin x 2
- 电源指示灯1个
- 功能指示灯一个,用于验证IO口基本功能
- 预留串口接口,方便和5V开发板连接,用串口即可程序
- 高性能爱普生32768Hz晶振,价格是直插晶振的10倍价格,易起振
- 20K RAM,64K ROM ,TQFP48封装
2. L298N双路电机驱动
L298N,是一款接受高电压的电机驱动器,直流电机和步进电机都可以驱动。一片驱动芯片可同时控制两个直流减速电机做不同动作,在6V到46V的电压范围内,提供2安培的电流,并且具有过热自断和反馈检测功能,可对电机进行直接控制,通过主控芯片的I/O输入对其控制电平进行设定,就可为电机进行正转反转驱动,操作简单、稳定性好,可以满足直流电机的大电流驱动条件。

3. 红外循迹模块
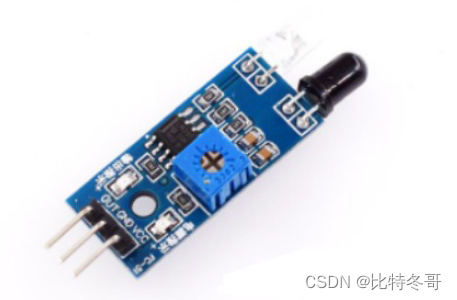
TCRT5000传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
接口说明:
(1) VCC 外接3.3V-5V电压(可以直接与5v单片机和3.3v单片机相连)
(2) GND 外接GND
(3) OUT 小板数字量输出接口(0和1)
二、环境配置
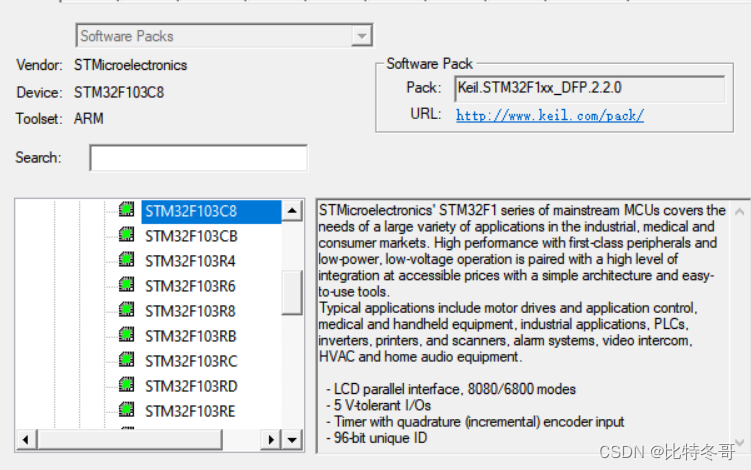
1. Device
我们选用的是STM32F103C8T6最小系统板,所以Device应选择STM32F103C8
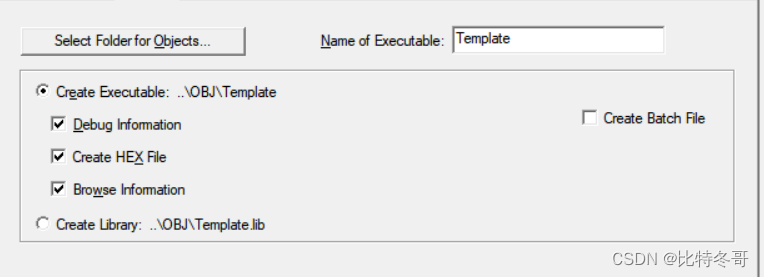
2. Output
Output中应创建HEX可执行文件
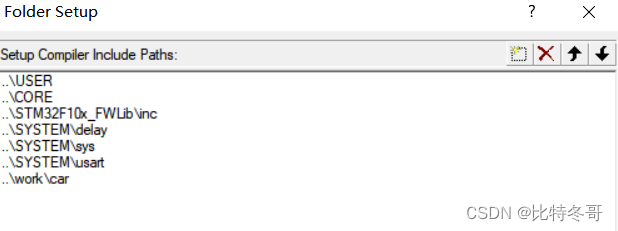
3. C/C++
C/C++中应定义宏和包含文件路径

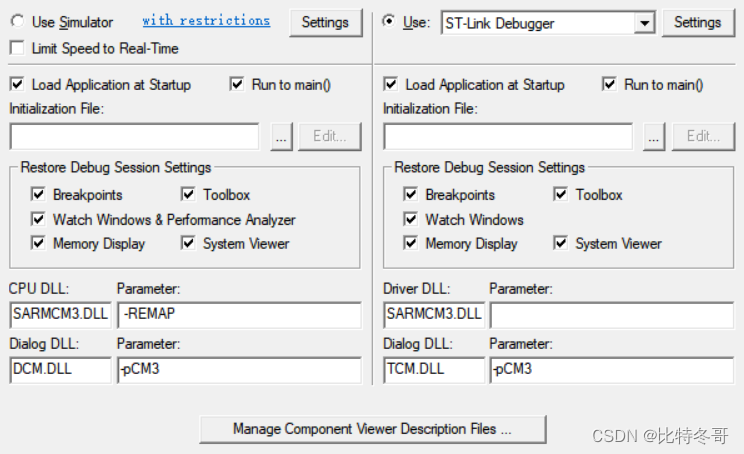
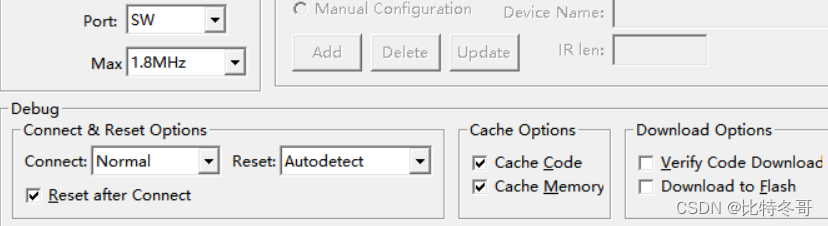
4. Debug
若选用 ST-link 或 J-link 还是其他下载器or串口,都需要事先安装相应的驱动和配置相关环境,这里我以ST-link为例配置相关环境
三、项目管理与代码实现
1. 项目结构
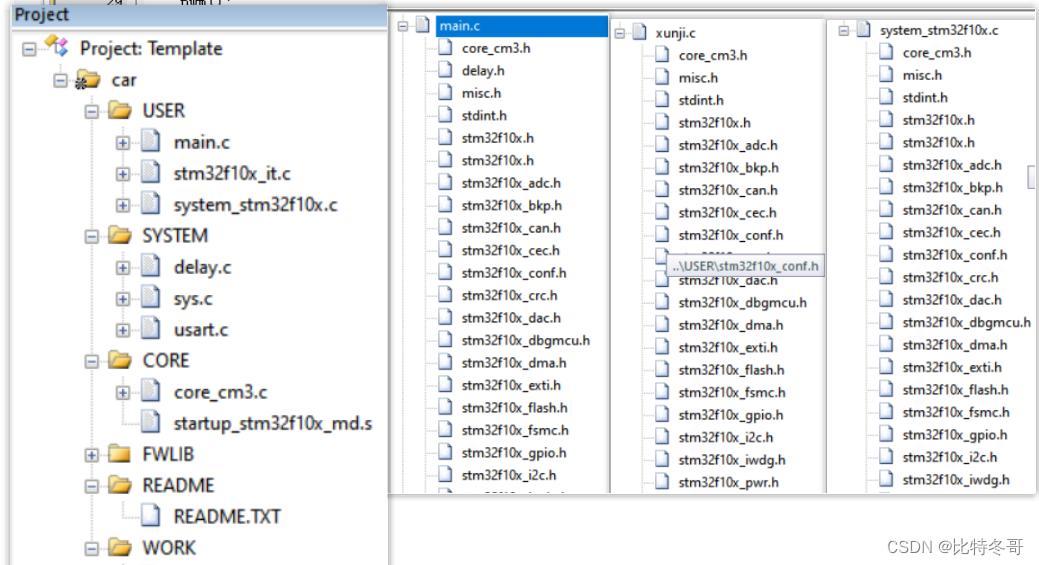
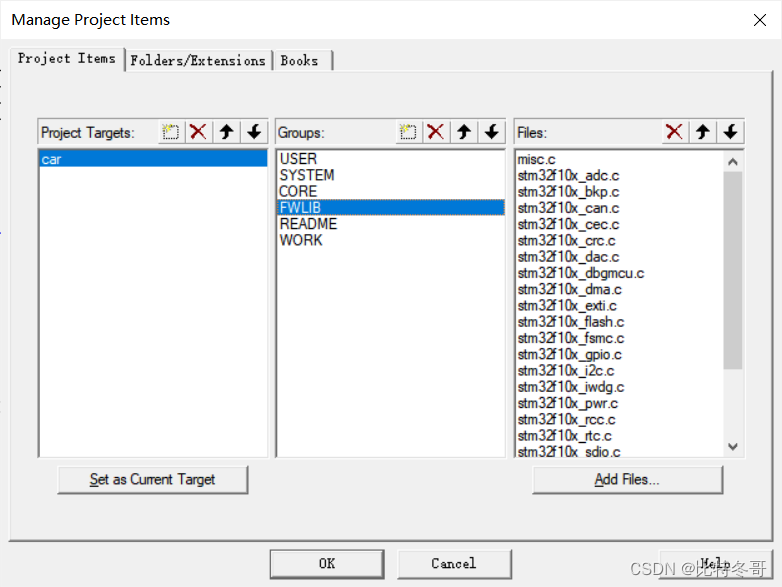
2. 工程管理
应在相应的工程文件下面添加上对应的.c文件
3. 具体文件
以下我主要说明几个比较重要的文件
xunji.c
#include "xunji.h"
#include "stm32f10x.h"void motor_gpio()
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_10|GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); }void xunji_gpio()
{GPIO_InitTypeDef GPIO_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入GPIO_Init(GPIOA, &GPIO_InitStructure); }
void pwm()
{GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_8; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能GPIOB时钟TIM_TimeBaseStructure.TIM_Period =99; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值TIM_TimeBaseStructure.TIM_Prescaler =71; //设置用来作为TIMx时钟频率除数的预分频值TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式 TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OCInitStructure.TIM_Pulse=0;TIM_OC1Init(TIM4, &TIM_OCInitStructure); TIM_OC3Init(TIM4, &TIM_OCInitStructure); TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器TIM_Cmd(TIM4, ENABLE); //使能TIM4
}
void run()
{TIM_SetCompare1(TIM4,30);TIM_SetCompare3(TIM4,30);IN1 = 1;IN2 = 0;IN3 = 1;IN4 = 0;
}
void back()
{TIM_SetCompare1(TIM4,70);TIM_SetCompare3(TIM4,70);IN1 = 0;IN2 = 1;IN3 = 0;IN4 = 1;
}
void right()
{TIM_SetCompare1(TIM4,0);TIM_SetCompare3(TIM4,30);IN1 = 1;IN2 = 0;IN3 = 0;IN4 = 0;
}
void left()
{TIM_SetCompare1(TIM4,30);TIM_SetCompare3(TIM4,0);IN1 = 0;IN2 = 0;IN3 = 1;IN4 = 0;
}void stop()
{IN1 = 0;IN2 = 0;IN3 = 0;IN4 = 0;}xunji.h
#ifndef __xunji_H
#define __xunji_H #include "sys.h" #define IN1 PBout(0)
#define IN2 PBout(1)#define IN3 PBout(10)
#define IN4 PBout(11)#define LEFT_ONE PAin(3)
#define LEFT_TWO PAin(7) void run(void);
void left(void);
void right(void);
void back(void);;
void stop(void);
void motor_gpio(void);
void xunji_gpio(void);
void pwm(void);
#endifmain.c
#include "stm32f10x.h"
#include "xunji.h"
#include "delay.h"void Init()
{TIM_SetCompare1(TIM4,25);TIM_SetCompare3(TIM4,25);IN1=1;IN2=0;IN3=1;IN4=0;
}int main(void){ motor_gpio();xunji_gpio();pwm(); delay_init();Init();while(1){if(LEFT_ONE==0&&LEFT_TWO==0){run();}else if(LEFT_ONE==0&&LEFT_TWO==1){right();}else if(LEFT_ONE==1&&LEFT_TWO==0){left();}else if(LEFT_ONE==1&&LEFT_TWO==1){run();}elsestop();}
}
总结
本节是以STM32F103C8T6最小系统为CPU,通过一些外围电路和软件编程实现小车红外循迹的功能。整个设计过程中最大的特点是利用简单的理论原理将红外循迹模块、L298N驱动模块、51单片机这三个模块有效的结合起来,利用红外循迹原理与pwm调节占空比的简单结合实现对小车红外循迹奠定编程理论基础,提高了效率,降低了编程的复杂度,具有很强的研究的意义,智能化的发展促使了智能小车往功能更加强大的方向发展。
项目源码
链接:https://pan.baidu.com/s/1_-j6TJepvMkMjUdHvDWS6w
提取码:s0hj
一键三连啦😊
技术交流可加下方wx联系👇👇👇