爱普生epson l455清零软件官方版是EPSONL455喷墨打印机专用的废墨清零软件,当打印机墨盒需要清零的时候,就需要用爱普生epson l455清零软件官方版,按附带教程来做,很快就能解决问题。
爱普生epson l455清零软件官方版是EPSONL455喷墨打印机专用的废墨清零软件,当打印机墨盒需要清零的时候,就需要用爱普生epson l455清零软件官方版,按附带教程来做,很快就能解决问题。
使用方法
以EPSON L310打印机清零操作为例仅供参考
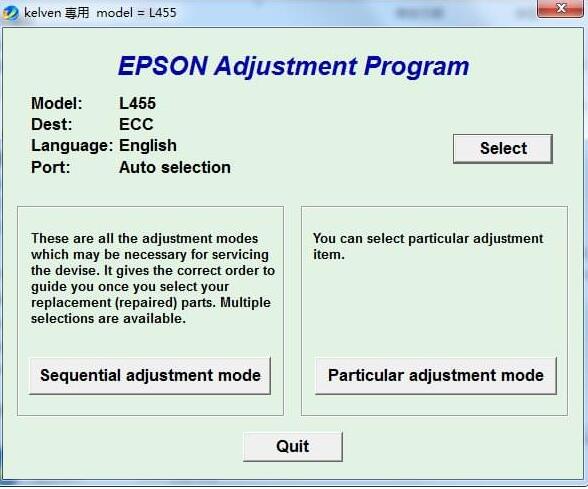
1.双击AdjProgcracked.exe 或者[Resetter.exe]启动软件。

2.点击[Select],选择Port打印机型号,然后点[OK],如下图。
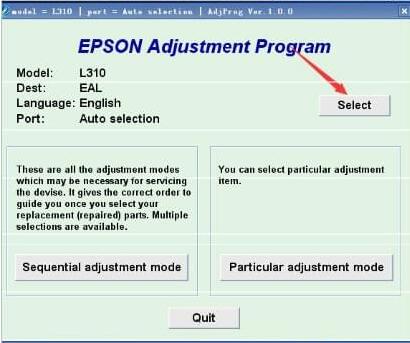
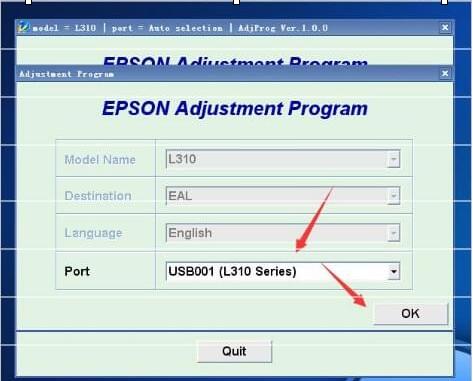
[如果port下拉列表中找不到你的打印机,请更换USB接口,并重新开打印机重试。]
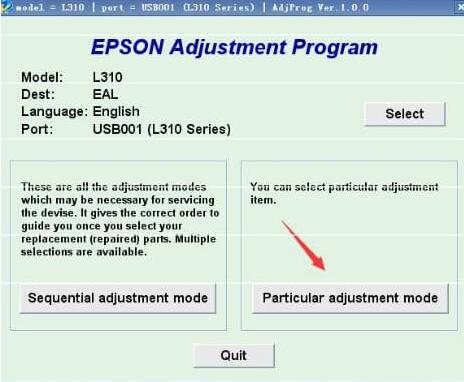
3.点击[Particular adjustment mode]进入主菜单. 如下图。
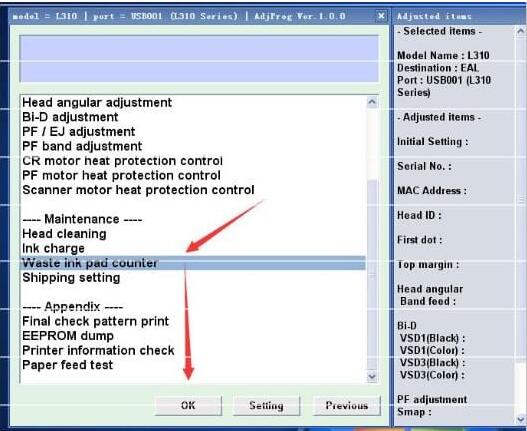
4.选择[Waste ink pad counter]然后点[OK]. 如下图。
5.点击方框打上[V],然后点击[Initialiation],接着点[确定] 如下图。
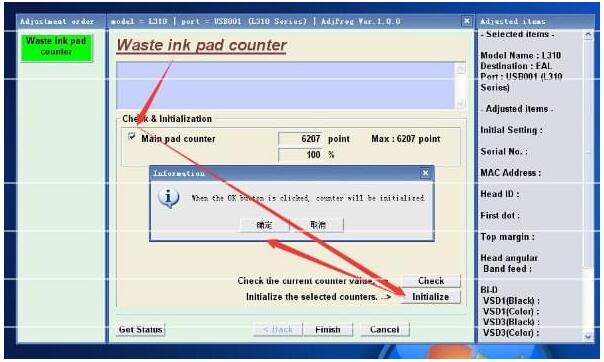
[如果清零过程中报错,请取消打印任务并重开打印机再清,如果还不行请重启电脑再试]
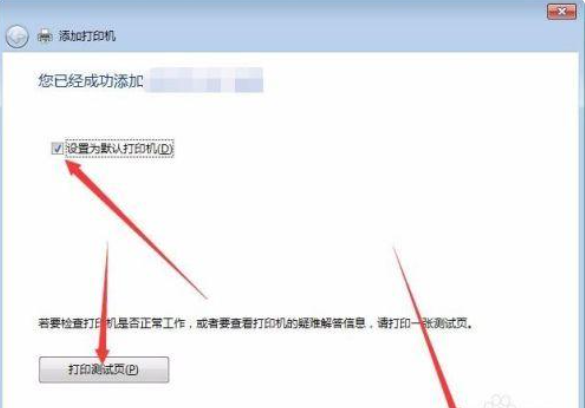
6.蓝色进度条跑完提示[plese turn off the printer] 请关闭打印机,然后点击[确定],接着点[确定]重开打印机。如下图。

亲,恭喜您,通过爱普生epson l455清零软件官方版已将打印机清零成功了!!!