iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!
先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现。另一个就是比较火的AR(增强现实 ),通过LIDAR能够测出这个现实中物体的大小尺寸,进而能够很好的3D建模,当然待开发的应用还有很多很多,毕竟相当于赋予了手机一双人的眼睛。
主要说一下这个苹果12激光雷达的原理,激光源是使用 的VCSEL的芯片,发射光脉冲,基于dTOF测距的,dTOF和iTOF的区别可以看https://www.zhihu.com/question/347869345这篇文章,目前市场上存在的激光雷达大部分都是基于TOF原理,那么为什么不用FMCW(调频连续波)这个技术呢?:FMCW的原理可以参考这个https://blog.csdn.net/qq_40624256/article/details/108897013
目录
FMCW与dTOF区别
FMCW激光雷达在市场上的发展
FMCW激光雷达核心技术及量产难点
FMCW与dTOF区别
(http://www.mems.me/mems/system_integrator_201907/8355.html)
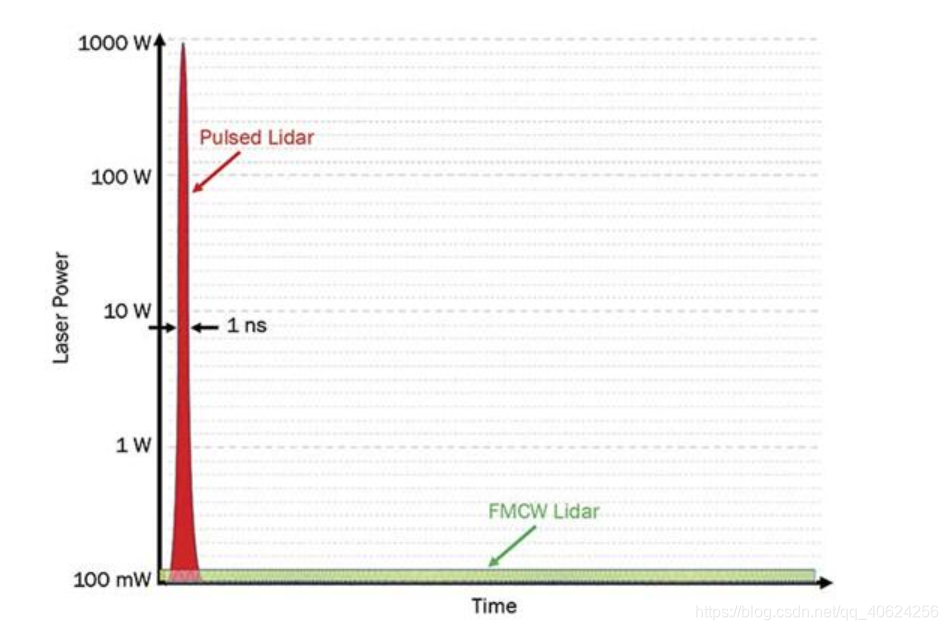
20世纪60年代激光雷达系统就出现了,最初激光雷达采用一种简单的直接探测方法。发射一个短而明亮的激光脉冲,测量返回所需的时间,并转换为距离信息。这种方法也被称为脉冲式(Pulsed)直接飞行时间法(dToF)激光雷达。不过,雷达迅速演进到使用相干探测方法,这种方法考虑了发射信号的频率和相位。相干雷达系统的最大优点是能够检测到回波信号的小相位偏移,利用多普勒效应大大减少来自固定杂波或静止物体信号的影响。最新一代的汽车雷达以调频连续波(FMCW)技术为基础,作为提高发射效率、提高灵敏度和抗干扰能力的最佳调制
FMCW解决方案比当前脉冲式dToF激光雷达解决方案的峰值激光功率低四个数量级以上,在测量距离、瞬时速度、环境抑制、多用户无干扰操作等方面优势明显。脉冲式dToF激光雷达发射一个非常窄的高功率激光脉冲,通过测量飞行时间来确认物体的距离。相比之下,FMCW激光雷达提供低功率的频率啁啾,被测物体的距离和速度以频移的形式得出。
缺乏廉价相干激光器和接收器以及相关的低成本芯片集成技术,造成了大多数商用激光雷达系统仍然是脉冲式dToF激光雷达的局面,也减缓了激光雷达向FMCW技术路线的演进速度。
脉冲式dToF和FMCW方法均能测量来自动物和衣物等物体高度漫射表面的反射。最终,激光雷达解决方案提供的测量范围和能见度由系统的功率水平和信噪比(SNR)决定。对脉冲式dToF激光雷达而言,决定最大测量范围的信噪比与峰值激光功率成正比。这需要将所有可用的光子压缩成一道狭窄的(纳秒级)明亮激光闪光。对于1550nm的激光,脉冲峰值激光功率可以高达几千瓦。如此高的峰值功率,虽然对人类和大多数动物眼睛安全,但对图像传感器有害。

激光雷达的技术演进,必然会像雷达一样采用相干探测方法。一些公司使用的激光频率啁啾与雷达系统中已经使用的频率啁啾类似,不是简单的脉冲。这类相干激光雷达基于FMCW技术,得到更高的探测灵敏度和准确性,并解决了脉冲式dToF激光雷达的许多缺点,例如对背景辐射的抗扰能力差、多用户干扰和缺少瞬时速度信息。FMCW激光雷达的信噪比与发射光子总数成正比,而不是与峰值激光功率成正比。此外,由于FMCW激光雷达的灵敏度高出脉冲式dToF激光雷达10倍,平均发射功率却是脉冲激光雷达的十分之一。因此,FMCW激光雷达能够以小于100mW的峰值激光功率发射周期较长的波形,以获得与脉冲式dToF激光雷达相同的信噪比,同时具有较低的功率。

Bastion Schwarz和两位同事发布的最新研究表明,峰值激光功率比激光功率平均值对CMOS(互补金属氧化物半导体)和CCD(电荷耦合器件)传感器的危害更大。CMOS和CCD传感器的损伤阈值测定为10kW/mm²。由于摄像头镜头可以进一步聚焦光线,因此将该值又降低了1万倍,也就是1W的激光脉冲就可能对摄像头造成损害。如果功率低于上述数值,那FMCW激光雷达对摄像头和人眼来讲更安全。
1550nm FMCW激光雷达系统在测量距离和瞬时速度两个参数上具有优势。相干探测的高信噪比,加之1550nm波长的人眼安全性,意味着1550nm FMCW激光雷达在公路上行驶时,可以很容易探测到前方300米以外的轮胎或类似的低反射率物体。在极端天气条件下,包括雷暴天气,这一探测距离足够让以70英里/小时速度行驶的车辆有足够的时间停车或变换车道。FMCW技术还可以通过多普勒效应即时测量物体速度。此功能非常重要,不仅因为它支持预测性分析和响应,还能够从原始点云数据中区分对象。
迄今为止,将FMCW解决方案推向市场的关键挑战是所需的高性能元器件无法实现低成本、大批量制造。相干技术需要具有大相干长度(窄线宽)的激光器,才能在300米的探测距离内完美工作。FMCW解决方案还需要对光进行相干处理,以提取光子携带的附加信息。这意味着需要非常精确的低噪声光信号处理(OSP)电路来构建相干接收器。此外,因为相干混合只对相同偏振的光子起作用,偏振也扮演着重要角色。激光器的波长稳定性和线性度在整个测量过程中至关重要;否则,信噪比会显著降低。
要制造出由此套光学系统定义的稳定、鲁棒性强、精确的分立元器件既困难又昂贵。两家初创公司Blackmore Sensors and Analytics Inc.(2019年5月被Aurora收购)和AEVA Inc.被两家著名的德国汽车制造商选中,并获得了大量资金,用于开发FMCW解决方案。现有的基于电信级元器件的系统成本约数万美元。这种价格可能适用于全自动驾驶汽车,取代人类驾驶员并全天候运行,但无法被L3级或L4级ADAS(高级驾驶辅助系统)的主流乘用车所接受。业界都寄希望于半导体技术的进步最终能降低激光雷达的价格。
总而言之,FMCW解决方案比当前脉冲式dToF激光雷达解决方案的峰值激光功率低四个数量级以上,在测量距离、瞬时速度、环境抑制、多用户无干扰操作等方面优势明显,同时具备集成完整激光雷达光学系统于一颗尺寸非常小的低成本硅光子芯片的潜力。上述优势可以改变激光雷达的应用范围,想象空间远远不至于自动驾驶汽车。
FMCW激光雷达在市场上的发展
接下来我们将从时间线的先后解读一下FMCW激光雷达在市场上的发展,以及最后分析一下为什么目前主导激光雷达市场的是TOF而不是FMCW。
2018——————美国的硅光子学创业公司SiLC是一家基于硅光技术的集成4D视觉解决方案供应商,在2018年宣布在单芯片上集成了1550nm调频连续波(FMCW)激光雷达(LiDAR)功能。与当时基于905nm飞行时间(ToF)技术的LiDAR解决方案不同,该波长由于人眼安全问题而限制了探测范围,同时受困于多用户串扰的问题。利用相干探测技术可以实现低激光峰值功率,同时测量瞬时速度。这种技术未能获得广泛应用的主要因素是昂贵的电信级元件,如窄线宽激光器和相干接收器。市场上主攻FMCW LiDAR的代表性厂商有美国Blackmore和 Aeva公司。
2018.11————Bridger Photonics公司成立于2006年,总部位于蒙大拿州,专注于提供精密激光雷达(LiDAR)解决方案。11月完成了A轮融资,全球光学巨头蔡司(ZEISS)是该轮融资的唯一投资方。

如上图所示,来自频率扫描或“啁啾(chirped)”的激光被分成两部分;一部分(Tx)被发射到被测目标、场景或对象;而另一部分(LO)留在本地,不会发射至被测目标。从被测目标(Rx)返回的光与LO干涉重组并进行探测,超越传统激光雷达技术的FMCW方案,不仅可以高精度、低功耗地测量超过100米范围物体的距离,而且,还能测量物体的相对速度。
2019.1————Insight LiDAR公司近日在拉斯维加斯举办的2019年消费电子展(CES)上正式推出了Digital Coherent LiDAR激光雷达产品,这是一款面向新兴自动驾驶汽车市场的芯片级远距离激光雷达(LiDAR)传感器。这款激光雷达基于调频连续波(FMCW)技术。Insight LiDAR公司的FMCW激光雷达传感器能够提供比飞行时间激光雷达高10~100倍的灵敏度,同时提供直接多普勒速度测量。激光雷达设计商早就知道FMCW探测技术的优势,但关键的激光光源体积较大而且很昂贵,”Insight LiDAR公司开发和技术负责人Chris Wood博士补充说

2019.5 ————Aurora收购blackmore公司(Bridger Photonics子公司 )
2019.10————据麦姆斯咨询报道,位于美国加州的高性能中距离多模态人脸识别系统国防承包商和全球开发商StereoVision Imaging(SVI),正在大力拓展其创新的调频连续波(FMCW)激光雷达(LiDAR)技术用于生物识别和自动驾驶等应用领域。
2019.11————韩国自动驾驶激光雷达(LiDAR)制造商INFOWORKS宣布,其最新的3D扫描调频连续波(FMCW)激光雷达Quantum系列近日首次在2019年北美物联网技术展(IoT TECH EXPO)上公开亮相。
2019.12————美国单芯片集成调频连续波(FMCW)激光雷达(LiDAR)解决方案供应商SiLC和创新型车辆外部照明系统及电子产品全球供应商Varroc Lighting Systems联合宣布,双方将在即将开幕的2020年消费电子展(CES 2020)上展示量产汽车前照灯中的激光雷达无缝集成技术。Varroc Lighting Systems前照灯基于复杂的LED设计,应用了四颗SiLC的硅光子FMCW视觉芯片,使每个前照灯能够提供完整的20 x 80度视场(FOV)。SiLC采用了1550 nm波长FMCW技术,SiLC的激光雷达视觉传感器可以检测物体的高度、宽度、距离、反射率、速度以及光偏振,其相干干涉传感方案比现有其它方案的精度提高了几个数量级。SiLC的4D +视觉芯片可以探测车辆周围200米以外的低反射率物体,从而为车辆在高速行驶中提供足够的响应时间来避开障碍物。


2019.12————近日宣布达成了自动驾驶产业的一项重要里程碑:Aeries,即Aeva的下一代调频连续波(FMCW)4D激光雷达系统,该系统将激光雷达传感器的所有关键元件集成于一颗微型光子芯片。这是汽车行业第一款结合大范围探测性能及低成本优势的激光雷达解决方案,将助推汽车自动驾驶技术的大规模应用。探测距离大于300米,批量价格低于500美元。Aeva的4D芯片激光雷达可以测量300米距离以外的物体,并能同时测量每个点的瞬时速度。Aeva激光雷达还不会受到其它传感器或太阳光的干扰,并且,其运行功耗仅为同性能其它产品的几分之一,从而提供了自动驾驶要求的安全性和可扩展性。其它FMCW方案相比,Aeva的4D芯片激光雷达优势还在于,后者可以独特地为每个光束每秒提供数百万个点,从而实现了迄今为止前所未有的超高保真度数据。
Aeva联合创始人Mina Rezk说,“Aeva方案的差异化优势在于,打破了最大探测距离和点云密度之间的相依性,到目前为止,这一直是飞行时间(ToF)和FMCW激光雷达的障碍之一。我们的4D激光雷达将多个光束集成在一颗芯片上,每个光束都能够独特地在超过300米的距离每秒测量超过200万个点。”大众集团和保时捷投资公司力挺

2020.1———Insight LiDAR在2020年消费电子展(CES 2020)上发布了面向新兴自动驾驶(AV)市场的超高分辨率、远距离数字相干激光雷达(Digital Coherent LiDAR™)传感器
Insight数字相干激光雷达的主要特点:
■ 远距离,对于10%反射率的物体,探测距离可达200米
■ 超高分辨率,高达0.025°x 0.025°
■ 大视场,120°x 340°
■ 像素级直接多普勒测速
■ 真正灵活的固态快轴扫描
■ 完全不受阳光和其他激光雷达的干扰
■ 低成本全半导体芯片方案

2020.1————北京光勺科技有限公司(简称:光勺科技)展示了调频连续波(FMCW)激光雷达演示(Demo)及最新路测视频。与Blackmore采用调频FMCW技术不同,光勺科技的新制式FMCW激光雷达(Self-Homodyne Laser Radar)调制的不仅是激光光波的频率,还包括相位,也就是使用了调相技术。该公司拥有相干检测技术的核心专利,能够实现4D激光点云输出。每一个输出点云中不仅包含距离信息,同时能够提取动态目标的多普勒彩色图形信息,这将有助于在自动驾驶中探测移动的目标,高效、自动输出安全驾驶距离;同时能够排除外界噪声的干扰,提高对外界温度、环境恶劣程度的容忍度。
这个赛道上,除了技术发展路线与光勺科技最相似的Blackmore,还有Strobe、Aeva和Bridger Photonics等专注于FMCW激光雷达的厂商。其中,Blackmore获得了宝马的风险投资,Strobe被通用汽车旗下的无人驾驶公司Cruise收购;而Aeva和Bridger Photonics分别获得了丰田风险投资和德国蔡司的投资。不过,这些激光雷达厂商的产品都或多或少被市场上的头部企业绑定了。比如,Blackmore的产品仅对Aurora发售,Aeva的样机仅用于奥迪和保时捷。
2020.5————洛桑联邦理工学院(EPFL)的Tobias Kippenberg实验室的研究人员找到了一种通过使用集成非线性光子电路来实现并行FMCW激光雷达引擎的新方法。他们将单个FMCW激光器耦合到氮化硅平面微型谐振器中,由于色散、非线性、腔体泵浦和损耗的双重平衡,连续波激光被转换为稳定的光脉冲序列。该研究已发表在《自然》(Nature)杂志上。
2020.8————美国旧金山初创公司Pointcould与IC设计咨询公司Opris Consulting、英国南安普顿大学(University of Southampton)的研究者共同开发了硅光子平台上的通用型3D成像传感器,并将研究成果发表于Applied Physics,论文地址为:https://arxiv.org/abs/2008.02411。
2020.8————纯固态芯片级激光雷达研发企业洛微科技(Luminwave)近日宣布获得数千万元天使轮融资,由中科创星领投,峰瑞资本跟投。融资资金将主要用于基于硅光子的纯固态成像级LiDAR芯片和LiDAR模组开发。洛微科技创立于2018年,总部位于杭州,并在西安、美国洛杉矶等地设立分支机构。该公司将光相控阵(OPA)、连续波调频(FMCW)和晶圆级微纳光学等的技术应用到LiDAR领域,自主研发了纯固态成像级激光雷达(Imaging Grade LiDAR)以及实现了毫米级的系统级封装(SiP)的微激光雷达(MicroLiDAR)。目前,公司第一代的纯固态成像级LiDAR已经初步完成样品,计划于下个月正式发布,MicroLiDAR已经进入量产,开始为多家客户供货。
在激光雷达领域,固态化是实现激光雷达规模化普及的业内公认的产品方案,其中包括Flash、MEMS、OPA等主流固态技术。其中Flash探测距离较短,难以适应自动驾驶的需求,而MEMS扫描控制难度大,器件成本仍然较高。OPA的方案相对而言,产品量产一致性高,抗振性能好,成本更低,被认为是固态激光雷达最佳方案,但仍有光信号覆盖有限、环境光干扰、测距较短等技术成熟度不高的问题。洛微科技的OPA方案采取的硅光子芯片方案,即使用硅CMOS IC的生态(兼容的设计、材料、工艺等)制作的光子芯片,这个技术路线可实现大规模集成和低成本的量产。目前OPA激光雷达需要解决的最基本的两个问题就是如何实现场景的光信号覆盖和高信噪比的测距。简单来说,就是利用产品内部的预留的少量发射光对返回的信号进行相干放大。这种相干放大,使得LiDAR可以使用人眼安全的低光功率探测更远的距离;另一方面这种放大只针对和本器件发射光波长特性严格相同的信号光,即可以极大的排除环境光和其他LiDAR信号的干扰。
针对此,洛微科技的解决方案是基于硅光子技术,相应开发了光相控阵扫描(OPA)芯片和相干探测芯片。OPA芯片依靠硅半导体工艺大量集成波长尺度的光学功能,解决了高分辨率和大视场角的光信号覆盖问题。而基于连续波调频(FMCW)的相干探测(Coherent Detection)芯片则解决了测距的问题。
2020.9————下一代传感和感知系统领导厂商Aeva和全球顶级汽车Tier-1供应商采埃孚(ZF)近日宣布建立合作,将全球首款调频连续波(FMCW)激光雷达推向汽车市场。
FMCW激光雷达核心技术及量产难点
FMCW激光雷达最核心的线性调频激光器依然是制约其发展的瓶颈
FMCW激光雷达被称为激光雷达领域皇冠上的明珠,相较于脉冲式激光雷达有着明显的性能优势,主要体现在以下几个方面:
1. 抗太阳光和其它激光的干扰,保证传感器的安全可靠;
2. 多普勒效应单像素实时测速,提供4D信息,有助于目标分类;
3. 更高的灵敏度和动态范围(>60dB);
4. 适合硅光子和相控阵(OPA)技术低成本批量生产。
FMCW激光雷达的门槛高、发展晚,不为大多数人所知。全世界能做脉冲式激光雷达的少说有上百家,但能做FMCW激光雷达的寥寥无几。正所谓外行看热闹,内行看门道,只有懂FMCW的人才能欣赏它。看看最近的几个案例:2017年通用Cruise收购Strobe;2018年宝马、丰田投资Blackmore;还有2019年5月24日Aurora收购Blackmore。据传闻,Intel正在研发基于硅光子的FMCW激光雷达,苹果和Waymo也在评估和寻求进入FMCW激光雷达领域。
FMCW激光雷达有几大组成部分(如下图)线性调频窄线宽激光;2)MZI干涉仪;3)光束扫描机构;4)平衡光电探测器;5)数字信号处理。这里每一个模块相较于脉冲式激光雷达都更有难度,但其中最考验厂家功力的是线性调频窄线宽激光器,而这也正是Blackmore和Strobe有着多年积累的看家本领了

下图是Bridger Photonics十年前发表的论文,用于线性调频激光测距技术:具体的调频涉及电机驱动、PZT压电陶瓷驱动和电流驱动,都是些外置光栅调频的外腔激光器,成本大于2w美元,体积大、稳定性可靠性不高。


线性调频激光器技术不局限于本文描述的外腔调谐激光方案,其它方案还包括使用单频激光加单边调制器、基于半导体激光线性化调频方案等。国内有科研院所使用过光纤激光器加单边调制加光放大器的方案,但问题是器件成本都极其高昂也难以量产。使用半导体激光器的方案,则在成本、量产、符合车规等方面相比Blackmore、Strobe等有明显的优势。半导体激光器方案已经被证明是可行的!
最后总结,FMCW激光雷达若要获得市场的认可,其中的激光器必须要在调频速度、调频范围、线性度、激光相干性、满足车规,以及能够低成本量产等多方面取得进展。虽然道路是艰辛的,相信FMCW激光雷达前景是光明的!
参考:
https://www.ithome.com/0/492/873.htm
https://www.huxiu.com/article/387418.html
https://laser.ofweek.com/2019-06/ART-240001-8300-30386197.html
https://www.sohu.com/a/349147422_256868
http://www.mems.me/mems/system_integrator_201906/8196.html





