随着 3D 成像技术日趋成熟,3D 摄影机已经出现在日常服务、金融支付、物流分拣、加工制造等越来越多的应用场景中。但仍有许多使用者,由于不甚了解不同类型 3D 摄影机之间的差异,在进行设备选择时存在诸多困惑。本文将系统介绍各类 3D 摄影机的基本原理、特点以及相互之间的差异,帮助您更好地完成相机选型。
什么是 3D 摄影机
普通数位相机输出的图像以二维像素网格构成。依据每个像素的属性将其定义为红色(Red)、绿色(Green)、蓝色(Blue),通常称为 RGB。不同属性的像素可以用 0-255 的数字来表示,例如,黑色的相应值为(0,0,0),纯鲜红色的相应值是(255,0,0)。成千上百万的像素可以构成我们常见的照片。

| 高精度 3D 摄影机 Ailook 支持 3D 即时成像 |
3D 摄影机的不同之处在于,它可以测量普通数位相机无法测量的深度数据。所谓深度数据,就是像素到摄影机的距离。所以 3D 摄影机可以获取四个值,分别是 RGB 值和深度信息,即RGB-D。
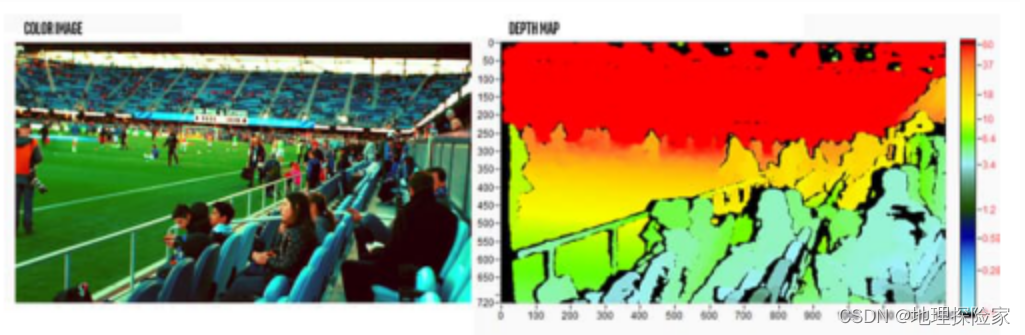
3D 摄影机输出的深度信息,可以透过不同的形式显示出来。在上图示例中,左边为彩色图,右边为深度图。深度图中的不同颜色,表示像素到相机的距离,青色表示距离相机最近,而红色则表示距离摄影机最远。其实深度图的显示,使用什么颜色不重要,只是为了便于辨识。
3D 摄影机的常见类型
3D 摄影机透过其使用的深度数据计算方式,来进行分类。不同类型的 3D 摄影机都有其优点与限制性,所以选取何种 3D 摄影机,就取决于使用者的实际需求。常见的选型要素有:最远测量距离、最高精度、是否支持户外使用这三点。
1.结构光与编码光
结构光 3D 摄影机机与编码光 3D 摄影机,都是透过光源发射器投射光(通常是红外光)到物体。所投射的光是有特定图案的。这种特定的图案,可以从视觉层面进行设置,也可以从时间层面进行设置,还可以是这两个方式的结合。
由于光投影的图案是既定的,所以 3D 摄影机的内置传感器,透过辨识场景中的图案,就可以获取到深度信息。例如下图,如果光的既定图案是一系列条纹,当它投射到一个球上,这些条纹将会依据球的表面,产生特定形变,且当球靠近光源发射器时,图案还会发生相应的改变。
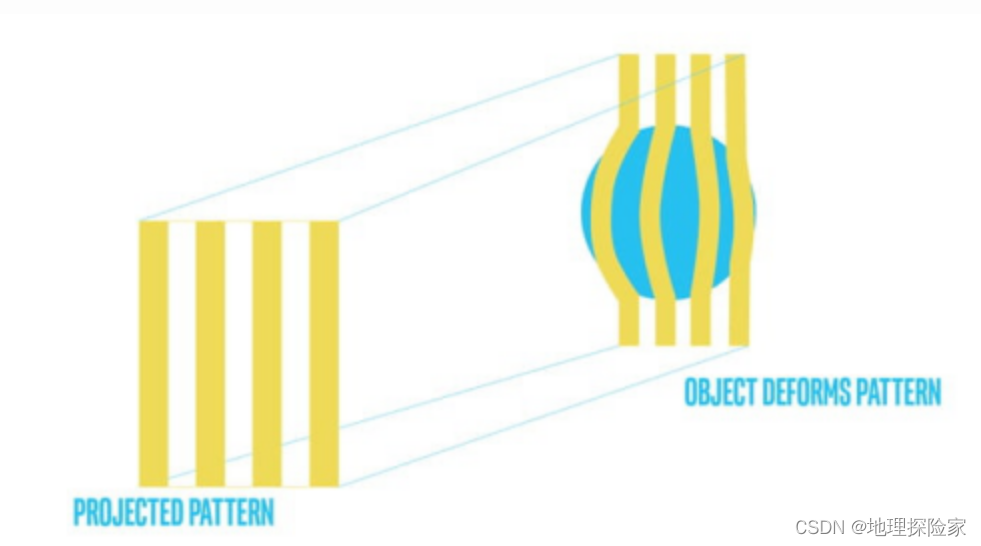
利用既定图像,与摄影机辨识到的实际图像之间的差异,可以计算出每个像素到摄影机的距离。这项技术的核心是需要精准辨识所投射的光的图案。
但是摄影机投射出的光的功率,会因为距离变大而衰减,还会受到环境中其他摄影机或设备,发出的红外线噪音的干扰,因此,编码光和结构光摄影机适合在室内,进行短距离作业。
| 工业 3D 摄影机 Surface 采用双目红外结构光技术 |
2.立体视觉
立体视觉摄影机依据内置的传感器数量,可分为单目立体视觉摄影机(内置单个传感器)与双目立体视觉(内置两个传感器)摄影机。由于它们工作原理相同,以下举例均以双目立体视觉技术为例进行介绍。
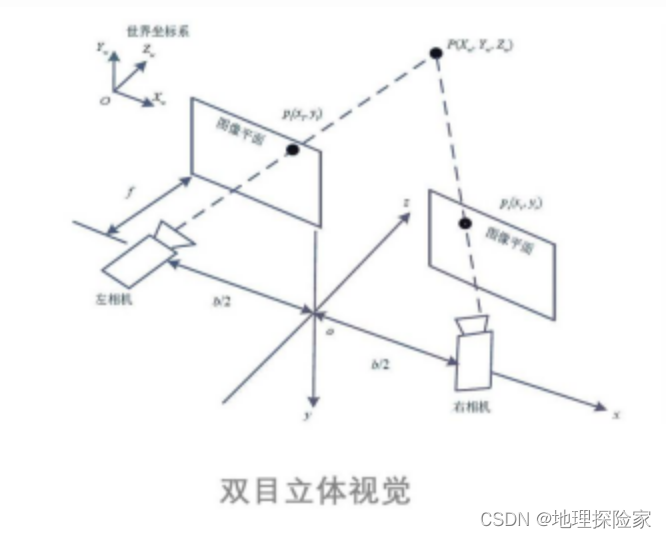
立体视觉摄影机常利用红外光来提高测量精度,并且可利用一切光进行测量,这一点不同于上文介绍的编码光,或结构光 3D 摄影机。双目立体视觉摄影机内置两个传感器,可以分别得到出两组图像的深度信息。由于传感器之间的距离是已知的,透过计算,便可以得到被测对象的深度信息。
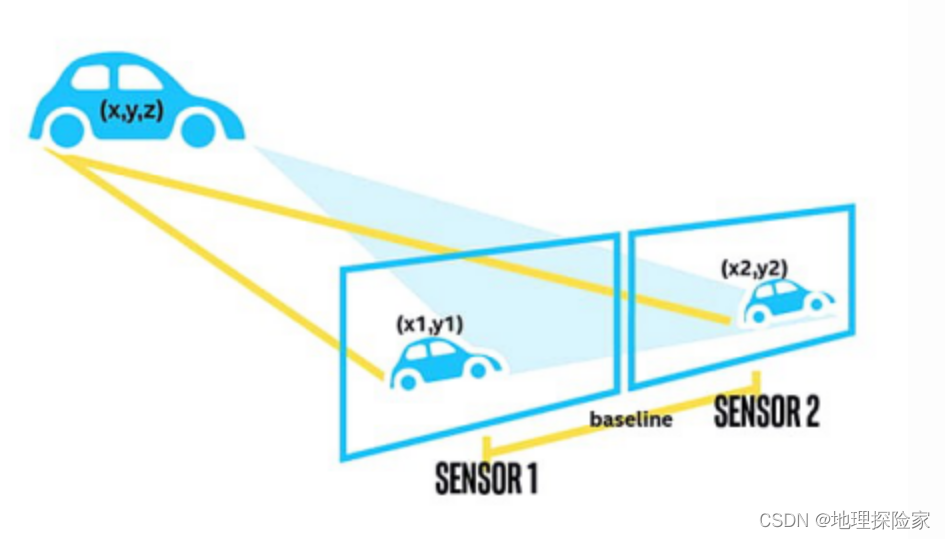
双目立体视觉摄影机的工作原理,与人眼进行深度感知的原理类似。人的两眼分别可看见一幅图像,大脑可以计算出两眼之间的差异,距离物体近的一只眼,所辨识出的物体移动幅度更大,而距离物体远的一只眼,所辨识出的移动幅度,就就小一些。
双目立体视觉摄影机在大多数照明条件下,甚至是户外,它都能保持良好的性能。如为其配置红外光发射器,那么即使在光照条件差的环境中,它依然能敏锐感知深度信息。
双目立体视觉摄影机的另一个优点是,在特定场景中,摄影机的使用数量是没有限制的,不会出现多个编码光摄影机或TOF相机,同时使用时出现的互相干扰的问题。
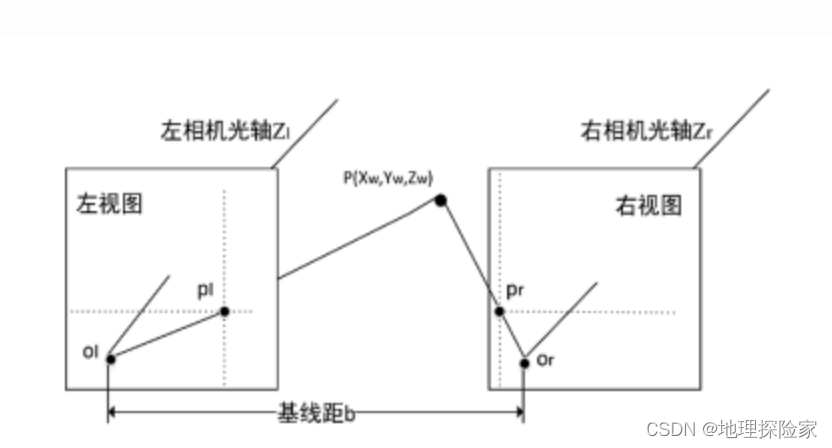
双目立体视觉摄影机所能测量的距离,取决于两个内置传感器之间的距离,也就是基线距离。基线距离越宽,相机可测试的距离就越远。事实上,天文学家们使用一种相似的技术,来测量恒星距地球的距离。
先测量一颗恒星在天空中的位置,六个月后,当地球运转到轨道中,离原始测量点最远位置时,再次测量同一恒星位置。这样,天文学家就可以利用大约 3 亿公里的基线距离,计算出恒星距离地球的位置(恒星的深度信息)。
3.TOF 摄影机
每种 3D 摄影机都依赖已知信息来推断深度信息。例如,在立体视觉技术中,基线距离是已知的。在编码光和结构光技术中,光的图案是已知的。而在 TOF 技术(Time of Flight)方面,光速则是用来计算深度的已知变量。
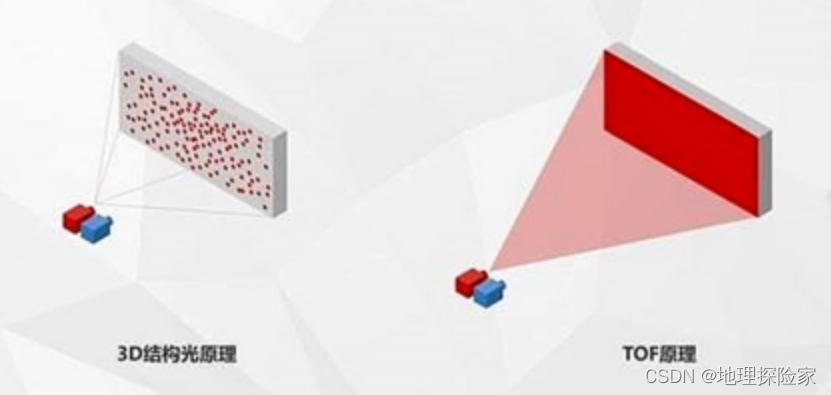
所有类型的 TOF 摄影机都会发射某种光线,用来扫射全场,然后测算光反射回来的时间。根据光的功率和波长,TOF 摄影机可适用远的距离的测量工作,例如,用 TOF 摄影机在直升机上,进行地图绘制的相关测量工作;汽车自动驾驶中常使用的雷射定位器。
TOF 摄影机的缺点是,在相同空间内,其他摄影机的光会对它们造成较强干扰,而且在室外环境下也不适用。
你能用 3D 摄影机做什么?
| 工业 3D 摄影机 Raygo 重复精度最高可达 5μm |
3D 摄影机可以让任何设备和系统,不需要人工干预的方式理解场景。虽然计算机可以实现理解 2D 图像,但这需要投入大量的时间和成本,来训练机器学习网络。
3D 摄影机本身可提供一些,无需训练便可辨识的信息,例如,3D 摄影机可直接区分前景、背景、场景,从图像中剔除背景物,这对于需要分割背景的相关应用中,非常有帮助。
本文为解释 3D 摄影机的类别及工作原理,列举了一些应用场景。而实际上,3D 摄影机可应用的范围,远比这广泛的多。未来,3D 视觉技术不仅能帮助设备看得更远、更立体、更精准,同时还能联合人工智能,助力更多领域的升级、创新。