目录
一、工程内容
二、AS608指纹模块使用
1.AS608 与 USB转TTL模块 的接线
2.上位机配置
3.AS608与STC12C60A通讯
三、驱动MG995(180度舵机)
1.MG995舵机数据手册
2.舵机驱动:
3.定时器定时100us
4.中断函数
一、工程内容
实现功能:用户通过指纹识别打开宿舍门锁
电子元件:
| 主控芯片 | stc12c60A | 供电方式 | USB供电 |
| 指纹模块 | AS608 | 电流、电压 | 5V、2A |
| 舵机 | MG995—180度 | 其它元件 | 1个蜂鸣器、2个LED、1个自锁开关 |
| 晶振 | 11.0529M | 其它元件 | 轻触开关 |
二、AS608指纹模块使用
1.AS608 与 USB转TTL模块 的接线 (AS608要用3.3V供电不能用5V供电)
只需要接四根线(Vi TX RX GND)

2.上位机配置
2.1 首先安装USB转TTL的驱动,然后打开串口
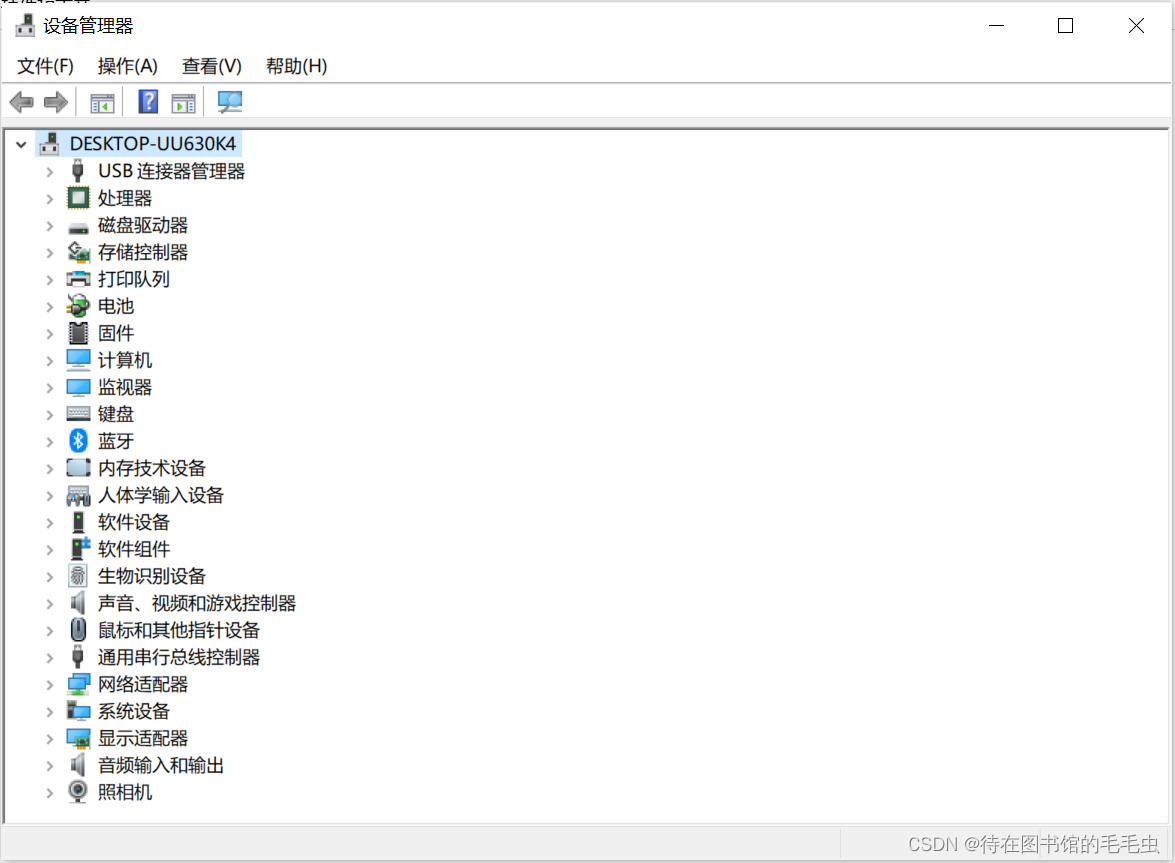
将AS608与USB转TTL模块正确接线后 连接电脑。打开设备管理器找到串口号COMX
(为了避免差错,来回拔插一次,观察设备管理器中串口号的变化)
找到串口号后在AS608的上位机选择正确的串口号。
2.2 配置波特率 注意:AS608的波特率要与程序设计的波特率相同才能进行通讯

2.3添加指纹 在我的电脑操作时 ,AS608模块需要先预热 通电一会后才能录入指纹。
3.AS608与STC12C60A通讯
单片机波特率设置:
void Uart_Init(void)
{
SCON=0x50; //UART方式1:8位UART; REN=1:允许接收
PCON=0x80; //SMOD=0:波特率不加倍
TMOD=0x21; //T1方式2,用于UART波特率
TH1=0xFf; //UART波特率设置
TL1=0xFf;
TR1=1; //允许T1计数
EA=1;
}
波特率计算——THx与TLx
定时器工作模式是8位自动重装载,TH1和TL1赋的初值一样

SMOD:波特率选择位。当用软件置位SMOD,即SMOD=1,则使串行通信方式1、2、3的波特率加倍;SMOD=0,则各工作方式的波特率不加倍。复位时SMOD=0。
一般选择不加倍,所以SMOD为0,SYSclk是单片机时钟,也就是晶振的频率,11.0592MHz,运算时要转化为基本单位Hz,即11059200Hz
设置57600(波特率要加倍 SMOD=1):
I2T模式定时器1溢出率:
11059200Hz/12/(256-TH1) = 11059200Hz/12*(256-TH1) = 921600/(256-TH1)
57600 = 2^SMOD/32*(921600/(256-TH1)) = 2/32 * (921600/(256-TH1)) = 57600/(256-TH1)
256-TH1 = 57600/57600 = 1,TH1 = 256-1 = 255,255转为十六进制就是FF
所以TH1 = TL1 = FF

三、驱动MG995(180度舵机)
1.MG995舵机数据手册
注意:MG995的舵机一定要用大于1a的电流驱动才能正常转动!!!(正常转动包括按照所写的代码转动90度而不是单纯的能转动)

2.舵机驱动:
舵机的输入线共有三条,红色中间,是电源正线,一根棕色(有些是黑色)是电源地线,这两根线给舵机提供最基本的能源保证,主要是电机的转动消耗。另外一根线是控制信号线,一般为桔黄色。
舵机的信号线是做为输入线就是接收PWM信号(定时器产生)。一般PWM的周期是20ms,那么对应的频率是50hz。那么改变不同的占空比就可以控制转动的角度。其中占空比从0.5-2.5ms,相对应的舵盘位置为0-180度,呈线性变化。

上图对应MG995的脉冲宽度与输出轴转角。
周期20ms 脉冲0.5ms 表示在20ms里有0.5ms是高电平,19.5ms是低电平。
用定时器计数100us,5us高电平 95us低电平就可以是舵机反方向转90度。
3.定时器定时100us
定时器有两种工作模式,分别为计数模式和定时模式。
定时器代码初始化
1.确定定时器的计数模式。
2.确定TLx与THx之间的搭配关系。
3.确定计数起点值。即TLx与THx的初值。
4.是否开始计数。TRx
TLx与THx之间256进制。即当TLx计到256个脉冲时,TLx归0同时THx进1。这也称为方式1。在方式1时,最多计65536个脉冲产生溢出。在主频为11.0592M时,每计一个脉冲为1.085us,所以溢出一次的时间为1.085usx65536=71.1ms
1和2可以由工作方式寄存器TMOD来设定,TMOD用于设置定时/计数器的工作方式,低四位用于T0,高四位用于T1。其格式如下:

定时器工作方式选择
定时器初始从0开始计数到65536然后溢出。要计数100us,所以初始计数要从(65536-100)计数到65536 然后溢出。
定时器初始化
TMOD=0X01; // 16位计数器
TH0=(65536-100)/256; // 高四位 100US定时
TL0=(65536-100)%256; //低四位
TR0= 1;
ET0= 1;
EA = 1;
4.中断函数
void timer0( ) interrupt 1 \\ 5个中断源的排序:0代表外部中断0中断 ,1代表定时器/计数器0
中断 , 2代表外部中断1中断, 3代表定时器/计数器1,4代表串行中断的中断
中断 interrupt 1 数字一定一定要写对,对应设置的定时器/计数器
中断函数响应条件
1.中断源有中断请求;
2. 此中断源的中断允许位为1;
3.CPU开中断(即EA=1)。
驱动代码:
#include <STC12C5A60S2.H>sbit Sevro_moto_pwm=P1^2; // 舵机信号线(橙色)
sbit Key=P2^1; //按键
sbit buzz = P1^4; //蜂鸣器unsigned char pwm_val = 0;//变量定义
unsigned char push_val = 14;//舵机归中,产生约,1.5MS 信号void delay1ms(unsigned int k) //延时1ms函数,k等于多少就延时多少ms
{unsigned int a,b,c,d;for(d=0;d<k;d++)for(c=1;c>0;c--)for(b=50;b>0;b--)for(a=2;a>0;a--);
} /**********************************************************************************************
** TIMER1中断服务子函数产生PWM信号
**********************************************************************************************/void time1()interrupt 1 using 2
{ TH0=(65536-100)/256; //100US定时TL0=(65536-100)%256;pwm_val++;if(pwm_val<=push_val) Sevro_moto_pwm=1; //PWM信号高电平时间else Sevro_moto_pwm=0; //PWM信号高电平时间if(pwm_val>=100)pwm_val=0;}/**********************************************************************************************
** 主函数
**********************************************************************************************/
void main(void)
{TMOD=0X21; // TH0=(65536-100)/256; //100US定时TL0=(65536-100)%256;TR0= 1;ET0= 1;EA = 1;push_val=13; //舵机归中delay1ms(1000); //延时1S让舵机转到其位置,停留一下
while(1)
{if(Key==0) { buzz=1;push_val=4; //舵机向正转约90度delay1ms(4000); //延时500MS让舵机转到其位置buzz=0;push_val=13; delay1ms(500);push_val=4; //舵机向反转约90delay1ms(500);; //延时500MS让舵机转到其位置}else{push_val=13;buzz=0; }
}}





