android v2.2
linux v2.6.32
board DM3730
sensor ov2656
参考: 《Android 底层开发技术实战详解》
在OMAP平台中,可以使用高级的ISP(图像信号处理)模块通过外接i2c方式连接的Camera Sensor驱动
来获得视频帧的数据
drivers/media/video/
此目录主要由三个部分组成
video for linux 2 设备:实现文件是omap34xxcam.h和omap34xxcam.c
ISP: 实现文件是isp目录中的isp.c isph3a.c isppreview.c ispresizer.c提供通过ISP进行
3A 预览 改变大小等功能
Camera Sensor 驱动:使用v4l2-int-device结果来注册
1.注册i2c主设备和平台数据的设置
arch/arm/mach-omap2/board-xxx
//注册i2c 2 时钟为400kHz
omap_register_i2c_bus(2, 400, xxx_i2c_boardinfo, ARRAY_SIZE(xxx_i2c_boardinfo));
#define OV2656_I2C_ADDR (0x61 >> 1)
static struct i2c_board_info __initdata xxx_i2c_boardinfo[] = {{I2C_BOARD_INFO("ov2655", OV2655_I2C_ADDR),.platform_data = &xxx_ov2656_platform_data,},
};struct ov2656_platform_data xxx_ov2656_platform_data = {.power_set = ov2656_sensor_power_set,.priv_data_set = ov2656_sensor_set_prv_data,.set_xclk = ov2656_sensor_set_xclk,
};2.sensor 电源设置
DM3730 GPIO_CAM_RST------GPIO_126GPIO_CAM_RDN------GPIO_167
static int ov2656_sensor_power_set(struct v4l2_int_device *s,enum v4l2_power power)
{----------------switch (power) {case V4L2_POWER_ON:isp_configure_interface(vdev->cam->isp, &ov2656_if_config);if (previous_power == V4L2_POWER_OFF) {/* 打开模拟电源 */twl_i2c_write_u8(xxx);twl_i2c_write_u8(xxx);gpio_direction_output(GPIO_CAM_PDN, 0);gpio_direction_output(GPIO_CAM_RST, 0);mdelay(1);gpio_direction_output(GPIO_CAM_RST, 1);mdelay(1);}break;case V4L2_POWER_OFF:/* 下电时序*/twl_i2c_write_u8(xxx);break;}
3. OMAP3 isp 配置设置
drivers/media/video/isp/isp.c
int isp_configure_interface(struct device *dev,struct isp_interface_config *config)
根据相关的参数配置ISP 控制器 I/F
选择并行或串行硬件preview
数据通道shifter
像素时钟极性
8到16位的CCDC输入模式
isp_configure_interface(vdev->cam->isp, &ov2656_if_config);
/**@dataline_shift: Data lane shifter.* 0 - No Shift, 1 - CAMEXT[13 to 2]->CAM[11 to 0]* 2 - CAMEXT[13 to 4]->CAM[9 to 0]* 3 - CAMEXT[13 to 6]->CAM[7 to 0]
*/
static struct isp_interface_config ov2656_if_config = {.ccdc_par_ser = ISP_PARLL,.dataline_shift = 0x1,.hsvs_syncdetect = ISPCTRL_SYNC_DETECT_VSRISE,.strobe = 0x0,.prestrobe = 0x0,.shutter = 0x0,.wenlog = ISPCCDC_CFG_WENLOG_AND,.wait_hs_vs = 2,.u.par.par_bridge = 0x3,.u.par.par_clk_pol = 0x0, //0 - 不反向
};
4. ov2656 driver
/drivers/media/video/ov2656.c1)注册,删除i2c驱动
static int __init ov2656_init(void)
{i2c_add_driver(&ov2656_i2c_driver);return 0;
}static void __exit ov2656_exit(void)
{i2c_del_driver(&ov2656_i2c_driver);
}2)定义sensor i2c驱动
static struct i2_driver ov2656_i2c_driver = {.driver = {.name = "ov2656",.owner = THIS_MODULE,},.probe = ov2656_probe,.remove = ov2656_remove,.id_table = ov2656_id,
};static const struct i2c_device_id ov2656_id[] = {{"ov2656", 0},{},
};3)注册sensor为i2c 客户端和V4L2设备
static int ov2656_probe(struct i2c_client *client, const struct i2c_device_id *id)
{---------------------------i2c_get_clientdata(client);//回调平台数据sensor->pdata->power_set = pdata->power_set;sensor->pdata->set_xclk = pdata->set_xclk;sensor->pdata->priv_data_set = pdata->priv_data_set;设置sensor的默认配置sensor->timeperframe.numerator = 1;sensor->timeperframe.denominator = 15;sensor->pix.width = 640;sensor->pix.height = 480;sensor->pix.pixelformat = V4L2_PIX_FMT_YUYV; sensor->v4l2_int_device = &ov2656_int_device;----------------------------i2c_set_clientdata(client, sensor);v4l2_int_device_register(sensor->v4l2_int_device);}4)V4L2 初始化设备static struct v4l2_int_device = {.module = THIS_MODULE,.name = "ov2656",.type = v4l2_int_type_slave,.u = {.slave = &ov2656_slave,},
};5)V4L2初始化从设备
static struct v4l2_int_slave ov2656_slave = {.ioctls = ov2656_ioctl_desc,.num_ioctls = ARRAY_SIZE(ov2656_ioctl_desc),
};
提供给上层的ioctl接口
static struct v4l2_int_ioctl_desc ov2656_ioctl_desc[] = {
};6)加载sensor驱动的log
------------ioctl_g_priv--------------
------------ioctl_s_power--------------
------------ioctl_dev_init--------------
ov2656 2-0030: Detect success (26,56)
------------ioctl_g_fmt_cap--------------
------------ioctl_s_power--------------
//返回sensor的私有数据地址
static int ioctl_g_priv(struct v4l2_int_device *s, void *p)
{struct ov2656_sensor *sensor = s->priv;return sensor->pdata->priv_data_set(s, p);return 0;
}//电源设置
static int ioctl_s_power(struct v4l2_int_device *s, enum v4l2_power new_power)
{-----------
switch (new_power) {case V4L2_POWER_ON:rval = sensor->pdata->set_xclk(s, OV2656_XCLK);//24M camera时钟if (rval == -EINVAL)break;rval = sensor->pdata->power_set(s, V4L2_POWER_ON);if (rval)break;if (sensor->detected)ov2656_configure(s);else {rval = ioctl_dev_init(s);printk("-------ioctl_s_power--->dev_init----\n");if (rval)goto err_on;}break;case V4L2_POWER_OFF:
err_on:rval = sensor->pdata->power_set(s, V4L2_POWER_OFF);sensor->pdata->set_xclk(s, 0);break;default:return -EINVAL;
}//初始化设备当从设备和主设备相连的时候static int ioctl_dev_init(struct v4l2_int_device *s)
{----------ov2656_detect(client);---------
}//探测i2c设备,读取i2c sensor的PIDH和PIDLstatic int ov2656_detect(struct i2c_client *client)
{u32 pidh, pidl;if (!client) return -ENODEV;if (ov2656_read_reg(client, 1, OV2656_PIDH, &pidh)) return -ENODEV;if (ov2656_read_reg(client, 1, OV2656_PIDL, &pidl))return -ENODEV;if ((pidh == OV2656_PIDH_MAGIC) && ((pidl == OV2656_PIDL_MAGIC1) )) {dev_info(&client->dev, "Detect success (%02X,%02X)\n", pidh, pidl);return pidl;}return -ENODEV;
}static int ioctl_g_fmt_cap(struct v4l2_int_device *s, struct v4l2_format *f)
{printk("------------%s--------------\n", __func__);return 0;
}5.打开sensor的log
/ # ------------ioctl_s_power--------------
----------------ov2656_configure------------
------------ioctl_s_power--------------
------------ioctl_g_fmt_cap--------------
------------ioctl_enum_fmt_cap--------------
--------ioctl_enum_framesizes--frms->index=0------
------------ioctl_enum_frameintervals--------------
------------ioctl_enum_frameintervals--------------
--------ioctl_enum_framesizes--frms->index=1------
------------ioctl_enum_frameintervals--------------
------------ioctl_enum_frameintervals--------------
--------ioctl_enum_framesizes--frms->index=2------
------------ioctl_enum_fmt_cap--------------
------------ioctl_g_fmt_cap--------------
------------ioctl_s_fmt_cap--------------
------------ioctl_s_parm--------------
------------ioctl_s_power--------------
----------------ov2656_configure------------
1)设置电源
2)ov2656_configure
static int ov2656_configure(struct v4l2_int_device *s)
{------------------------------//写复位寄存器ov2656_write_reg(client, OV2656_SYS, 0x80);mdelay(5);/* Common registers */err = ov2656_write_regs(client, ov2656_common[0]);sensor->hsize = pix->width;sensor->vsize = pix->height;/* Store image size */sensor->width = pix->width;sensor->height = pix->height;sensor->crop_rect.left = 0;sensor->crop_rect.width = pix->width;sensor->crop_rect.top = 0;sensor->crop_rect.height = pix->height;--------------------------
}
3)ioctl_g_fmt_cap
查询出一种格式,查询驱动所支持的格式
static int ioctl_g_fmt_cap(struct v4l2_int_device *s, struct v4l2_format *f)
{return 0;
}
4)ioctl_enum_framesizes
帧大小
static int ioctl_enum_framesizes(struct v4l2_int_device *s,struct v4l2_frmsizeenum *frms)
{if (frms->index >= 2)return -EINVAL;frms->pixel_format = V4L2_PIX_FMT_YUYV;frms->type = V4L2_FRMSIZE_TYPE_DISCRETE;frms->discrete.width = 640;frms->discrete.height = 480;}
5)ioctl_enum_frameintervals
每秒15帧
static int ioctl_enum_frameintervals(struct v4l2_int_device *s,struct v4l2_frmivalenum *frmi)
{if (frmi->index >= 1) return -EINVAL;frmi->type = V4L2_FRMIVAL_TYPE_DISCRETE;frmi->discrete.numerator = 1 ;frmi->discrete.denominator = 15; return 0;
}
6)ioctl_s_fmt_cap
设置格式
static int ioctl_s_fmt_cap(struct v4l2_int_device *s, struct v4l2_format *f)
{ struct ov2656_sensor *sensor = s->priv;struct v4l2_pix_format *pix = &f->fmt.pix;sensor->pix = *pix;return 0;
}
7)ioctl_s_parm
设置参数
static int ioctl_s_parm(struct v4l2_int_device *s, struct v4l2_streamparm *a)
{printk("------------%s--------------\n", __func__);return 0;
}8)寄存器配置列表const static struct ov2656_reg ov2656_common[2][300] = {/* XGA_Default settings */{//IO & Clock & Analog Setup{0x308c,0x80}, //TMC12: DIS_MIPI_RW{0x308d,0x0e}, //TMC13: MIPI disable{0x360b,0x00},{0x30b0,0xff}, //IO_CTRL0: Cy[7:0]{0x30b1,0xff}, //IO_CTRL1: C_VSYNC,C_STROBE,C_PCLK,C_HREF,Cy[9:8]{0x30b2,0x2c}, //IO_CTRL2: R_PAD[3:0]{0x300f,0xa6},{0x3010,0x81},{0x3082,0x01},{0x30f4,0x01},{0x3091,0xc0},{0x30ac,0x42},{0x30d1,0x08},{0x3015,0x02}, //AUTO_3: AGC ceiling = 4x, 5dummy frame{0x3093,0x00},{0x307e,0xe5}, //TMC8: AGC[7:6]=b'11{0x3079,0x00},{0x3017,0x40}, //AUTO_5: disable data drop, manual banding counter=0{0x30f3,0x82},{0x306a,0x0c}, //0x0c->0x0f Joe 0814 : BLC{0x306d,0x00},{0x336a,0x3c},{0x3076,0x6a}, //TMC0: VSYNC drop option: drop{0x30d9,0x95},{0x3601,0x30},{0x304e,0x88},{0x30f1,0x82},{0x306f,0x14},{0x302a,0x02},{0x302b,0x6a},{0x3012,0x10}, {0x3018,0x80}, // jerry, 0624{0x3019,0x70}, {0x301a,0xd4}, //Wonder 20090909{0x3013,0xf7}, {0x30af,0x10},{0x304a,0x00},{0x304f,0x00},{0x30a3,0x80}, //Wonder From OV, 20090615 0x10{0x3013,0xf7}, {0x3014,0xa4}, //R1D bit6 always = 0 , bit[5]=1, bit[0]=1 //Wonder for AE oscillation{0x3071,0x00},{0x3073,0x00},{0x304d,0x42},{0x304a,0x00}, //Disable 50/60 auto detection function, due to ov2650 no this function{0x304f,0x00}, //Disable 50/60 auto detection function, due to ov2650 no this function{0x3095,0x07},{0x3096,0x16},{0x3097,0x1d},{0x3020,0x01}, {0x3021,0x18}, {0x3022,0x00},{0x3023,0x06},{0x3024,0x06},{0x3025,0x58},{0x3026,0x02},{0x3027,0x5e},{0x3088,0x02},// ISP_XOUT 640{0x3089,0x80},{0x308a,0x01},// ISP_YOUT 480{0x308b,0xe0},{0x3316,0x64},{0x3317,0x25},{0x3318,0x80},{0x3319,0x08},{0x331a,0x64},{0x331b,0x4b},{0x331c,0x00},{0x331d,0x38},{0x3100,0x00},{0x3320,0xfa}, //Jerry 0x9a{0x3321,0x11}, {0x3322,0x92}, {0x3323,0x01}, {0x3324,0x97}, //Jerry 0x92 {0x3325,0x02}, {0x3326,0xff}, {0x3327,0x10}, //0x0c{0x3328,0x11}, //Jerry 0x0f{0x3329,0x16}, //Jerry 0x14{0x332a,0x59}, //Jerry 0x66{0x332b,0x60}, //5f -> 5c //Jerry 0x5c{0x332c,0xbe}, //a5 -> 89 //Jerry 0x89{0x332d,0x9b}, //ac -> 96 //Jerry 0x96{0x332e,0x34}, //35 -> 3d //Jerry 0x3d{0x332f,0x36}, //Jerry 0x2f{0x3330,0x49}, //Jerry 0x57{0x3331,0x44}, //Jerry 0x3d{0x3332,0xf0}, {0x3333,0x00}, //0x10 {0x3334,0xf0}, {0x3335,0xf0}, {0x3336,0xf0}, {0x3337,0x40}, {0x3338,0x40}, {0x3339,0x40}, {0x333a,0x00}, {0x333b,0x00}, {0x3380,0x27}, {0x3381,0x5c}, {0x3382,0x0a}, {0x3383,0x29}, //0x2a{0x3384,0xab}, //0xad{0x3385,0xd3}, //d5{0x3386,0xbf}, {0x3387,0xbc}, {0x3388,0x03}, {0x3389,0x98}, {0x338a,0x01}, {0x3340,0x0c}, {0x3341,0x18}, {0x3342,0x30}, {0x3343,0x3d}, {0x3344,0x4b}, {0x3345,0x59}, //0x60 {0x3346,0x67}, //0x6a{0x3347,0x71}, {0x3348,0x7d}, //0x84{0x3349,0x8e}, //0x96{0x334a,0x9b}, //0xa2{0x334b,0xa6}, //0xac{0x334c,0xb9},{0x334d,0xc6},{0x334e,0xd9},{0x334f,0x34}, {0x3350,0x35}, //Wonder for lens 20090909{0x3351,0x25},{0x3352,0x08},{0x3353,0x23},{0x3354,0x00},{0x3355,0x85},{0x3356,0x34},{0x3357,0x25},{0x3358,0x08},{0x3359,0x1e},{0x335a,0x00},{0x335b,0x85}, {0x335c,0x35},{0x335d,0x25},{0x335e,0x08},{0x335f,0x18},{0x3360,0x00},{0x3361,0x85},{0x3363,0x01},{0x3364,0x03},{0x3365,0x02},{0x3366,0x00},{0x338b,0x0C}, //auto uv //add saturation{0x338c,0x10},{0x338d,0x80}, //40 indoor saturation{0x3370,0xd0},{0x3371,0x00},{0x3372,0x00},{0x3374,0x10},{0x3375,0x10},{0x3376,0x04}, ///0624,jerry, for preview sharp{0x3377,0x00},{0x3378,0x04},{0x3379,0x40},{0x3069,0x80}, //Jerry{0x3087,0x02},{0x3300,0xfc},{0x3302,0x11},{0x3400,0x00},{0x3606,0x20},{0x3601,0x30},{0x30f3,0x83},{0x304e,0x88},{0x3086,0x0f}, {0x3086,0x00}, // {0x30a8,0x54}, //0x56 Wonder for Sun black{0x30aa,0x52}, //0x42 //Wonder for Sun black{0x30af,0x10}, {0x30b2,0x2c}, {0x30d9,0x8c},{0x363B,0x01},{0x363C,0xF2},{0xFFFF,0xFF},},
};6.android HAL
hardware/ti/omap3/camera/V4L2Camera.cpp
CameraHardware.cpp
Converter.cpp
在startPreview()的实现在,保存预览回调函数并建立预览线程,在预览线程的循环中,等待视频数据的到达
视频数据到达后调用预览回调函数,将视频帧送出
status_t CameraHardware::startPreview()
{----------mCamera->StartStreaming();mPreviewThread = new PreviewThread(this);----------
}
取景器预览的主要步骤
1)在初始化的过程中,建立预览数据的内存队列
2)在startPreview()中建立预览线程
3)在预览线程的循环中,等待视频数据到达
int CameraHardware::previewThread()
{----------VIDEO_FRAME---------yuyv422_to_yuv420sp((unsigned char *)rawFramePointer,(unsigned char *)mRecordingHeap->getBase(),PREVIEW_WIDTH, PREVIEW_HEIGHT);
mDataCb(CAMERA_MSG_VIDEO_FRAME, mRecordingBuffer, mCallbackCookie);mDataCbTimestamp(systemTime(), CAMERA_MSG_VIDEO_FRAME, mRecordingBuffer, mCallbackCookie);
--------------PREVIEW FRAME------------
yuyv422_to_yuv420sp((unsigned char *)rawFramePointer,(unsigned char *)mHeap->getBase(),PREVIEW_WIDTH, PREVIEW_HEIGHT);mDataCb(CAMERA_MSG_PREVIEW_FRAME, mBuffer, mCallbackCookie);
-------------------------------------------------------4)在预览到达后使用预览回调机制将视频向上传送
int CameraHardware::pictureThread()
{-----------------if (mMsgEnabled & CAMERA_MSG_COMPRESSED_IMAGE) {LOGE("Take Picture COMPRESSED IMAGE");mDataCb(CAMERA_MSG_COMPRESSED_IMAGE, mCamera->GrabJpegFrame(), mCallbackCookie);}------------------
}录制视频的主要步骤
1)在startRecording()的实现中保存录制视频回调函数
2)录制视频可以使用自己的线程,也可以使用预览线程
status_t CameraHardware::startRecording()
{}
3)通过录制回调函数将视频帧送出
void CameraHardware::releaseRecordingFrame(const sp<IMemory>& mem)
{}
当调用releaseRecordingFrame()后,表示上层通知Camera 硬件抽象层,这一帧的内存
已经用完,可以进行下一次的处理。camera 处理流程
1)使用映射内核内存的方式V4L2_MEMORY_MMAP,构建预览的内存MemoryHeapBase需要
从V4L2驱动程序中得到内存指针
status_t CameraHardware::startPreview()
{-----------------mPreviewFrameSize = PREVIEW_WIDTH * PREVIEW_HEIGHT * 2;mHeap = new MemoryHeapBase(mPreviewFrameSize);----------------
}
2)在预览线程中,使用VIDIOC_DQBUF调用阻塞等待视频帧的到来,处理完成后使用VIDIOC_QBUF调用
将帧内存再次压入队列,然后等待下一帧的到来
ioctl(fd, VIDIOC_DQBUF, &videoIn->buf);
ioctl(fd, VIDIOC_QBUF, &videoIn->buf);7. CameraHardware.cpp
打开摄像头
E/CameraHardware( 913): return Preview Heap
E/CameraHardware( 913): beginAutoFocusThread
E/CameraHardware( 913): Picture Thread
E/CameraHardware( 913): Take Picture RAW IMAGE
E/CameraHardware( 913): Take Picture COMPRESSED IMAGE
E/CameraHardware( 913): pictureThread: preview started
调用
sp<IMemoryHeap> CameraHardware::getPreviewHeap() const
{LOGE("return Preview Heap");return mPreviewHeap;
}
按下拍照按键
int CameraHardware::beginAutoFocusThread(void *cookie)
{CameraHardware *c = (CameraHardware *)cookie;LOGE("beginAutoFocusThread");return c->autoFocusThread();
}status_t CameraHardware::takePicture()
{pictureThread();return NO_ERROR;
}int CameraHardware::pictureThread()
{---------------------if (mMsgEnabled & CAMERA_MSG_COMPRESSED_IMAGE) {LOGE("Take Picture COMPRESSED IMAGE");mDataCb(CAMERA_MSG_COMPRESSED_IMAGE, mCamera->GrabJpegFrame(), mCallbackCookie);LOGE("%s: preview started", __FUNCTION__);mPreviewThread = new PreviewThread(this);
}调用GrabJpegFrame()在V4L2Camera.cpp中实现ov2656
news/2025/3/31 13:11:29/
相关文章

4N65-ASEMI高压N沟道MOS管4N65
编辑:ll
4N65-ASEMI高压N沟道MOS管4N65
型号:4N65
品牌:ASEMI
封装:TO-220
最大漏源电流:4A
漏源击穿电压:650V
RDS(ON)Max:2.5Ω
引脚数量:3
沟道类…

16N65-ASEMI高压MOS管16N65
编辑-Z
16N65在TO-220封装里的静态漏极源导通电阻(RDS(ON))为0.55Ω,是一款N沟道高压MOS管。16N65的最大脉冲正向电流ISM为64A,零栅极电压漏极电流(IDSS)为1uA,其工作时耐温度范围为-55~150摄氏度。16N65功耗…

android 停止一段时间,repo sync 工作一段时间后就停止了
$?1; while [ $? -ne 0 ] ; do repo sync ; done 然后repo sync 工作一段时间后就不动了: Fetching projects: 95% (210/221) Fetching project platform/prebuilt Fetching project platform/sdk Fetching project platform/system/bluetooth Fetching project…
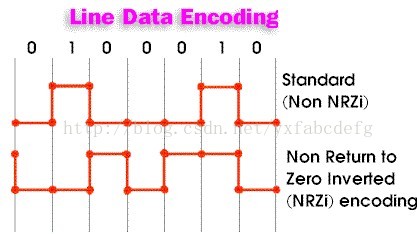
NRZ、NRZI编码
RZ 编码(Return-to-zero Code):
归零编码。 在 RZ 编码中,正电平代表逻辑 1,负电平代表逻辑 0,每传输完一位数据,信号返回到零电平。
信号线上会出现 3 种电平:正电平、负电平、零…

QNAP 威联通NAS ts-453bmini ups断电自动关机
买了nas,买了ups,突然想起这个ups不能和nas通信,那岂不是无法自动关机,ups不是白买了,本着物尽其用的原则,网上搜了下方案,发现主要思路是nas跑脚本ping路由器或者某个没断电可以正常网络联通的…
ubuntu下面的背光键盘的使用
测试环境:
ubuntu18.10-amd64
笔记本电脑:N56VZ
echo -n 3 > /sys/class/leds/asus::kbd_backlight/brightness
N56背光键盘排线断裂修复
华硕ASUS N56VZ背光排线在开机箱盖子的时候不小心被暗扣子扯到,然后就扯断了,重新更换背光键盘淘宝需要160.
修复背光键盘,主要有以下两大方案: 一.导电银漆 二.更换"金手指排线" 三.直接飞线
方案一,我试过了,极难操作,而且那个银油漆很难干,还有毒,最后和"金…
lenovo L480 进入bios_华硕 N56VZ N56 因bios导致 黑屏 不亮机 解决方案
0 写在前面 说明,不一定可以通行解决所有问题,因为我只解决了我遇到的问题。 分享该文,如果能帮到某些人,就很OK了! 正文开始之前,感谢二位同志。 李家乐 的关于N56VZ救砖的文章帮助了我,链接如…