文章目录
- 前言
- 1 大致框架
- 2 迭代器
- 3 map和set的封装
前言
上篇博客已经讲解了红黑树插入的模拟实现,这篇文章的目的是利用上节课讲解的底层实现来封装map和set.参考代码借鉴的是STL SGI版本3.0
1 大致框架
首先我们来看看源码里面怎么定义的:
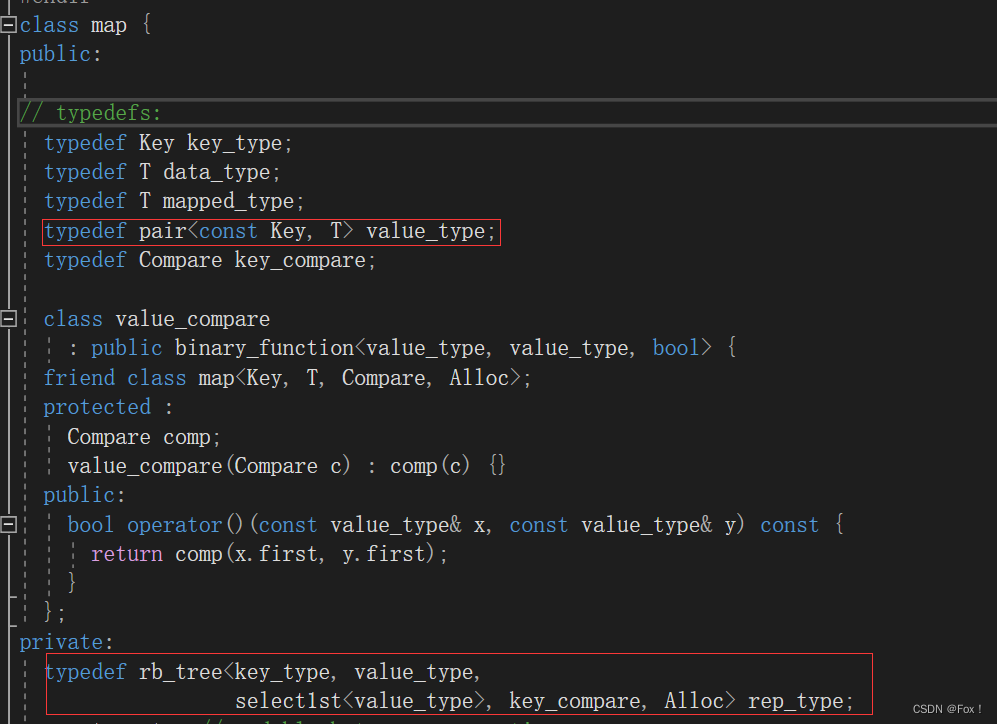
 从源码中我们不难发现map和set底层是用了一颗红黑树来封装的,并且模板参数与我们自己想的不太一样。set中传入的是<K,K>,map中传入的是<K,Pair<K,V>> (其他参数可以暂时不用考虑)
从源码中我们不难发现map和set底层是用了一颗红黑树来封装的,并且模板参数与我们自己想的不太一样。set中传入的是<K,K>,map中传入的是<K,Pair<K,V>> (其他参数可以暂时不用考虑)
大家想想,为什么要这么设计❓这样设计的好处是什么❓
我们传入两个参数的目的就是为了用一颗红黑树封装map和set,也就是第二个参数我们可以理解为给的是一个T,T可以接受上层的传入来的参数。
那可能大家又有了疑问?那为啥要传入第一个参数呀?直接用第二个参数不行吗?
大家别忘了,我们使用find接口和erase接口是用的参数是啥?是不是无论是map还是set都是用的是K,所以这个参数我们必须的传。
但是这样做问题又来了,上层是如何知道我们比较结点大小的时候比较的是K,还是Pair<K,V>?
所以我们还得再传入一个模板参数,不妨给一个仿函数,通过仿函数来取得数据。
2 迭代器
同样,迭代器往往就是容器中最精华的部分,所以迭代器的设计也是有着举足轻重的地位,这里迭代器的设计思路类似于链表的迭代器,不过具体实现却是比链表更加复杂,接下来我们便来看看。
像* -> == !=这些运算符重载好说,实现起来不难,关键是如何实现++重载?–重载?
给了一颗红黑树,如下图,我们如何走到下个结点呢?
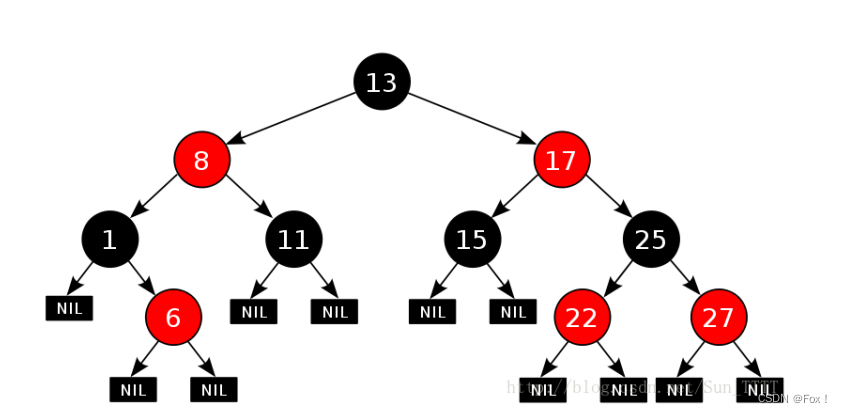 我们不妨采用这种思路:如果右子树存在,就找右子树的最左结点;右子树不存在,需要判断是否孩子是父亲的右节点,是的话还要往祖宗向上找,直到找到孩子是父亲的左节点为止。
我们不妨采用这种思路:如果右子树存在,就找右子树的最左结点;右子树不存在,需要判断是否孩子是父亲的右节点,是的话还要往祖宗向上找,直到找到孩子是父亲的左节点为止。
我们不妨来举一个例子:假如当前在1这个结点,由于1的右子树存在,且6这个结点恰好是1右子树的最左节点,所以++后应该走到了6;假如现在当前结点为11,由于11的右子树为空,所以要往上找,直到找到孩子是父亲左节点为止:11往上找父亲为8,8的右孩子是11,所以没有找到孩子是父亲右孩子的情况继续往上走,孩子为8,父亲为13,13的左孩子为8,随意此时找到了孩子是父亲左的那一个,所以++后就走到了13这个位置。
同理- -运算符的重载可以与++运算符重载反着来,思路类似:如果左子树存在,就找左子树的最右结点;左子树不存在,需要判断是否孩子是父亲的右节点,是的话还要往祖宗向上找,直到找到孩子是父亲的右节点为止。
这个我就不再分析了,大家可以自行分析。
为了方便,我们将用nullptr来构造找到了末尾,不用继续找了,但是STL中并不是这样设计的,是用了一个头结点来连接:
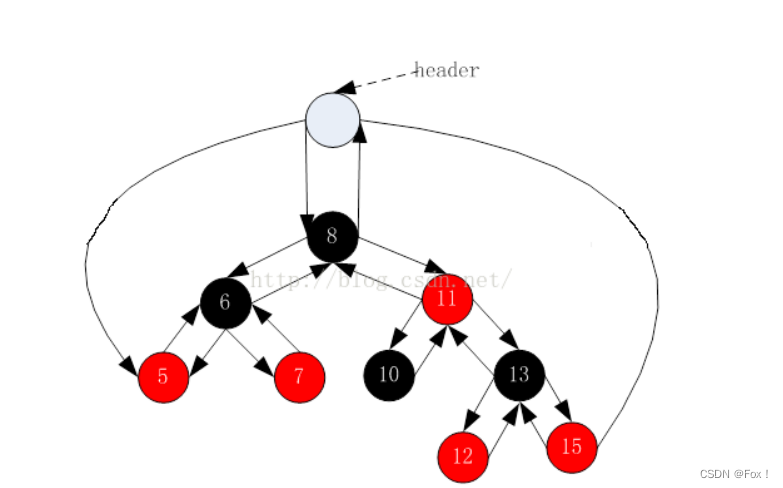 走到了头结点就表示找到了末尾。
走到了头结点就表示找到了末尾。
用这种方式会稍微麻烦些,不过总体也是不难的。
然后我们自己便可以实现一份迭代器了:
template<class T, class Ref, class Ptr >
struct __RBTreeIterator
{typedef RBTreeNode<T> Node;typedef __RBTreeIterator<T, Ref, Ptr> Self;Node* _node;__RBTreeIterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}bool operator==(const Self& self)const{return _node == self._node;}bool operator!=(const Self& self)const{return _node != self._node;}Self& operator++(){if (_node->_right)//右子树存在,就找右子树的最左结点{Node* left = _node->_right;while (left->_left){left = left->_left;}_node = left;}else{//右子树不存在,需要判断是否孩子是父亲的右节点,是的话还要往祖宗向上找,直到找到//孩子是父亲的左节点为止Node* child = _node;Node* parent = _node->_parent;while (parent && parent->_right == child){child = parent;parent = parent->_parent;}//走到这里说明找到了孩子是父亲的左节点或者//孩子已经是根节点了(表明在根节点也没有找到,说明已经遍历完成了)_node = parent;}return *this;}Self& operator--(){if (_node->_right)//左子树存在,就找左子树的最右结点{Node* right = _node->_left;while (left->_right){left = left->_right;}_node = right;}else{//左子树不存在,需要判断是否孩子是父亲的左节点,是的话还要往祖宗向上找,直到找到//孩子是父亲的右节点为止Node* child = _node;Node* parent = _node->_parent;while (parent && parent->_left == child){child = parent;parent = parent->_parent;}//走到这里说明找到了孩子是父亲的右节点或者//孩子已经是根节点了(表明在根节点也没有找到,说明已经遍历完成了)_node = parent;}return *this;}
};3 map和set的封装
其他的都好说,关键是如何实现set不能够修改,而map中可以修改Val;
我们可以采取这种方式:set的普通迭代器我们用上层的const迭代器实现,set的const迭代器我们也用上层的const迭代器实现。map的话我们只需要将==第二个模板参数给pair<const K,V>==就可以了。
set.hpp:
namespace grm
{template<class K>class set{struct SetOfKey{const K& operator()(const K& k){return k;}};private:RBTree<K, K, SetOfKey> _rbTree;//typedef typename RBTree<K, const K, SetOfKey>::Iterator iterator;//不能够像上面这样传入参数typedef typename RBTree<K, K, SetOfKey>::ConstIterator iterator;typedef typename RBTree<K, K, SetOfKey>::ConstIterator const_terator;public:iterator begin(){return _rbTree.begin();}iterator end(){return _rbTree.end();}const_terator begin()const{return _rbTree.begin();}const_terator end()const{return _rbTree.end();}pair<iterator, bool> insert(const K& k){return _rbTree.insert(k);}};
map.hpp:
namespace grm
{template<class K, class V>class map{struct MapOfKey{const K& operator()(const pair<const K, V>& kv){return kv.first;}};private:RBTree<K, pair<const K,V>, MapOfKey> _rbTree;public:typedef typename RBTree<K, pair<const K, V>, MapOfKey>::Iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapOfKey>::ConstIterator const_iterator;iterator begin(){return _rbTree.begin();}iterator end(){return _rbTree.end();}const_iterator begin()const{return _rbTree.begin();}const_iterator end()const{return _rbTree.end();}pair<iterator, bool> insert(const pair<K,V>& kv){return _rbTree.insert(kv);}V& operator[](const K& k){pair<iterator, bool> tmp = insert(make_pair(k,V()));return tmp.first->second;}};
但是这样实现set时也还是会遇到问题:那就是我们用了普通迭代器来构造const迭代器,这样势必是会报错的,有什么处理方式吗?
我们可以在迭代器中多给出一个构造:
//模板参数是普通迭代器就是拷贝构造//模板参数是const迭代器就是用普通迭代器构造const迭代器__RBTreeIterator(const __RBTreeIterator<T,T&,T*>& it):_node(it._node){}
这样就能够解决问题了。
如果大家还有哪里不懂的地方可以私信博主,有需要的可以参考博主的码云:
【码云地址】