本期为大家带来蛙色VR平台,场景管理—细节功能操作。

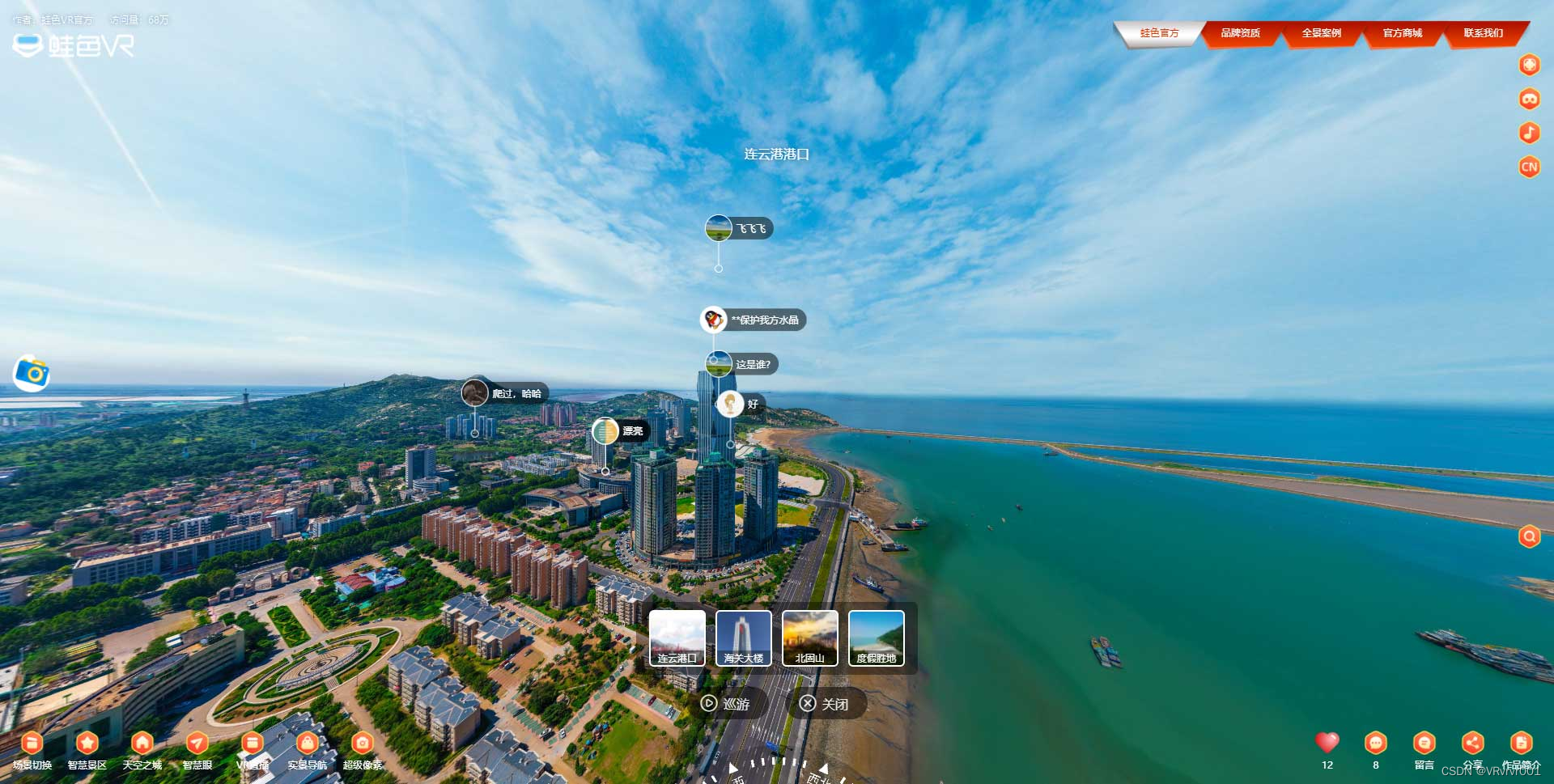
功能位置示意
一、本功能将用在哪里?

细节功能,用于展示VR漫游作、大像素、高清矩阵作品中细微不容易发现,但却又比较有亮点或者能起到关键作用的画面。
通过在全景图中添加锚点,以及结合配图、文字的方式,让用户在浏览作品时可以快速定位到细节画面并弹出相关图文介绍。
应用领域:
1.宏大场面,具有代表性的地标建筑,气势恢宏的城市航拍;
2.细节展示,具备观赏性的艺术精品,微距展示作品的细腻刻画;
3.导览地图,纵览全局的卫星视角,结合手绘导览展示地区信息。

点击这里 查看案例
二、如何使用本功能?
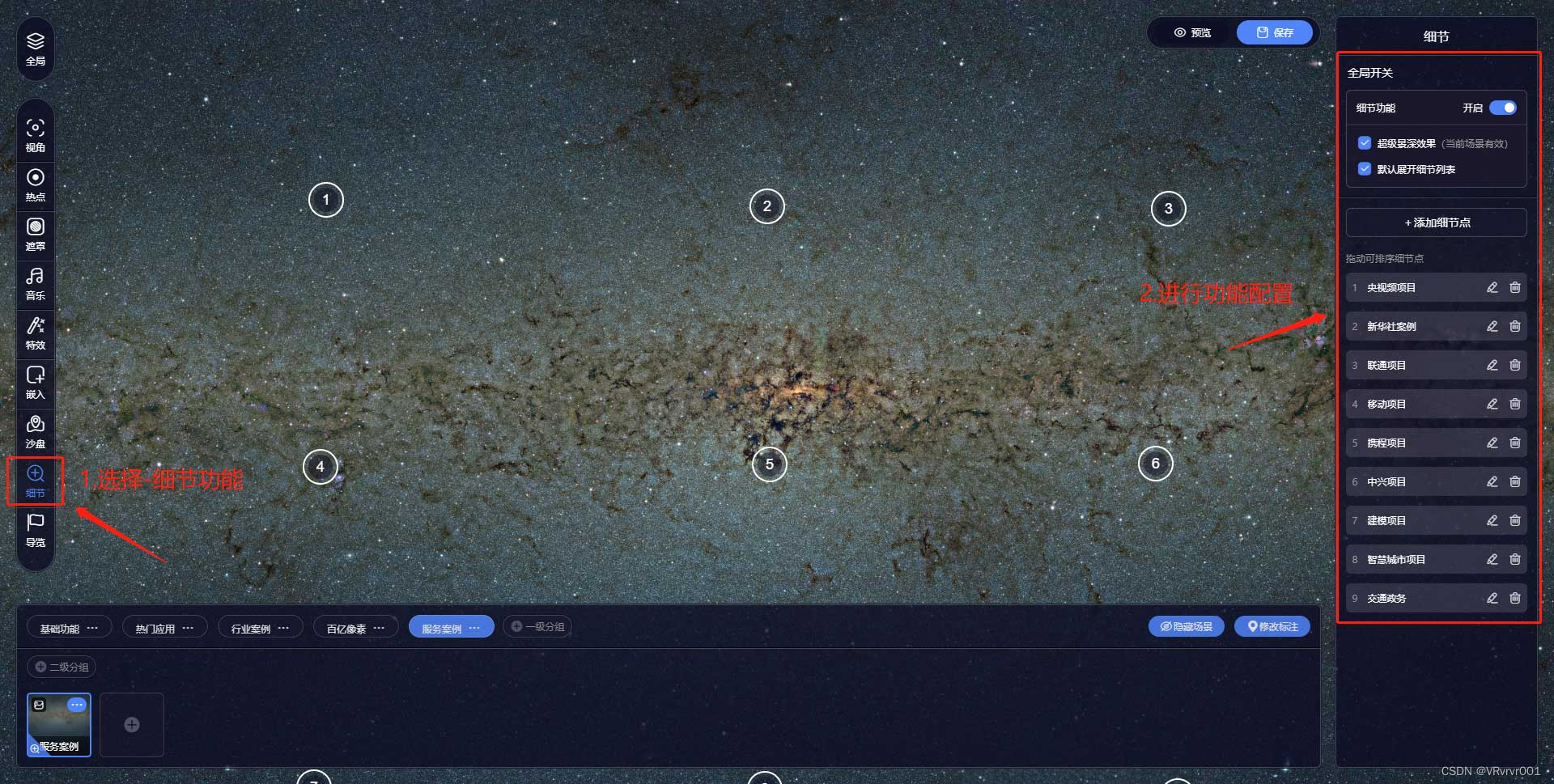
1、选择-细节功能
2、全局开关,细节功能设置为:开启
①超级景深效果 ,默认设置为关闭;

勾选后,点击细节点,将先拉动至最远视距,再定位到细节点,展示效果更加;
若未勾选,点击细节点,将直接移动到细节点位置。
②默认展开细节列表,默认设置为关闭;
勾选后,打开作品后,后台配置完成的细节场景,
将自动打开,完成配置的细节列表(详见上图)。
3、添加细节点

(1)确定视野范围,将影响到跳转的位置视野;
若细节的当前视野范围值受限,可在功能模块【视角】-【景深设置】中调整。
(2)输入细节标题,建议不超过5个字;
(3)上传细节封面,建议尺寸:140*140;
(4)上传细节配图,建议尺寸:480*270;
(5)简介输入文字介绍;
(6)拖动细节点至指定位置。
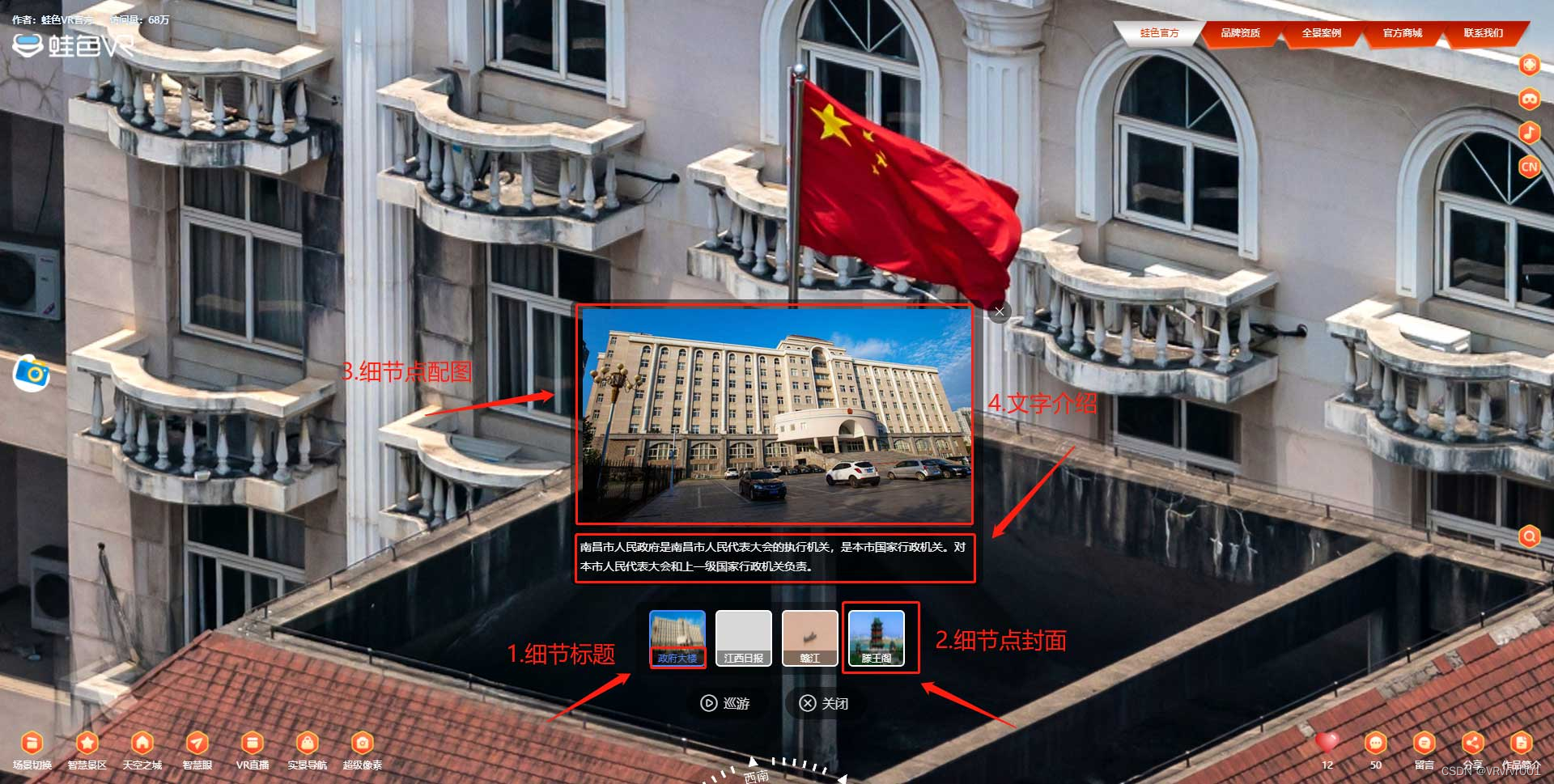
浏览页具体位置
4、配置拖动多个细节点

细节点可以添加多个,并且会按数量的顺序逐渐递增(1、2、3…)。
5、浏览页“巡游”功能

点击“巡游”可以按顺序自动播放场景中所有细节点。
以上就是本期场景管理模块-细节功能的主要介绍,欢迎大家在评论区留言反馈更多优化建议!