
第五章:基于EURO-NCAP的AEB系统验证与优化
牛喀网将持续更新,请锁定牛喀网!

近年来,汽车制造商已经实现了各种先进的驾驶辅助技术改善车辆的操作。这些 技术包括电子控制装置,其能够根据车辆的状态自动的做出动作。开发这种辅助技术 有许多安全问题:在紧急情况下,控制装置能够比驾驶员更快地做出决定,并且因此 减少了某种形式的碰撞的可能性。
另一方面 AEB 系统分为前方碰撞预警(FCW Forward Collision Warning)和自动 制动两个阶段。FCW 的警告是当危险出现的前一段时间,利用声光或者震动等方式 提醒驾驶员制动。避撞预警系统的关键是避撞算法,碰撞算法决定了预警的时机和逻 辑。预警的提前时间是基于驾驶员反应时间,驾驶员的反应时间一直是一个测试难点。若预警时间过早,则预警系统会干扰驾驶员正常驾驶,并且降低驾驶员对 AEB 系统 的信任,使驾驶员放松警惕;若预警时间过晚,则将会无法起到预警的作用,导致事 故的发生。
为了实现这一目标,在汽车工业中对驾驶员建模的研究越来越受到关注,因此可 以开发驾驶员在环(DIL Driver in Loop)控制系统。DIL 系统工作来解释驾驶员的意 图,以便做出是否介入的决定。这些 DIL 系统的最终结果是改进车辆控制,而不使 驾驶员感觉他们失去了对车辆的控制。
■ 汽车 AEB 系统的硬件模拟器
DIL 系统可以分为软件和硬件,软件是 AEB 系统的场景及传感器建模软件、车 辆动力学仿真软件、控制系统仿真软件;硬件是驾驶员操作装置、图像仿真显示设备、 声音模拟设备,以及座椅。
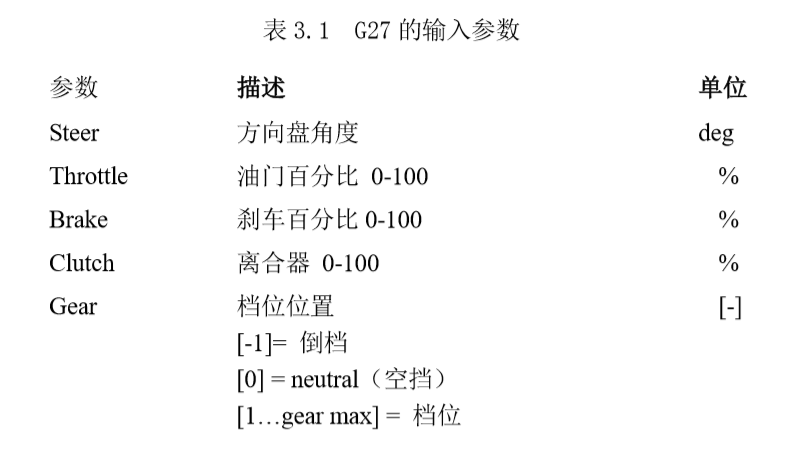
在建立驾驶员在环系统中,按照结构来分类是输入系统、处理系统、输出系统三 部分。输入系统是模拟驾驶仪,在 PreScan 软件中可以支持罗技 MOMO、 罗技的 Wingman Formula GP 和罗技 G27 设备;处理系统是 DIL 的软件仿真模型,包括:仿真环境模型、传感器仿真模型和模型的逻辑控制算法,车辆动力学模型受到驾驶员 和 AEB 系统的控制,并且根据车辆底盘特性,反馈车辆的运动姿态;输出系统是 PreScan 软件的 VisSever 窗口,将车辆运动姿态数据可视化,驾驶员通过显示器观察 车辆运动姿态,调整驾驶控制,从而形成一个封闭的驾驶员在环系统。
驾驶员在环的功能是为了在驾驶员参与的情况下测试控制算法,并且在本文中驾 驶员会受到方向盘给的回馈震动。DIL 系统可以允许驾驶员在设计的地图里驾驶。
本文中采用 CarSim8.0.2 作为车辆动力学仿真平台,将 PreScan7.12 作为 AEB 系 统的场景和传感器建模工具,利用 MATLAB/Simulink2013b 研究 AEB 系统的控制算法。硬件环境是一台 64 为 Window 7 操作系统的台式电脑,处理器是酷睿 i7,4G 内 存。驾驶员的模拟驾驶设备是罗技公司的 G27,包括方向盘、排挡和踏板三大组件, 使用真皮方向盘,更加真实的模拟实车的方向盘操作。

图 3.1 驾驶员在环 AEB 测试仿真平台
■ 场景及传感器建模软件与系统控制软件介绍
本文使用 PreScan 软件建立场景与传感器模型。PreScan 软件是汽车主动安全的 仿真平台,能够快速建立仿真交通场景和传感器的仿真模型,可以实现不同的天气、 道路、桥梁、隧道、房屋、车型、传感器、行人的各种组合模型。而且 PreScan 软件 能够和 MATLAB/Simulink 软件进行良好的联合仿真,可以连接人机交互设备从而实 现驾驶员在环 DIL(Driver-In-the-Loop)。
PreScan 软件可以实现不同天气的光照强度、太阳位置、雨水强度、雾天的能见 度、降雪量的各种环境。PreScan 的传感器可以做到与真实传感器较为接近的水平。该软件中有毫米波雷达、激光雷达、超声波雷达、普通摄像头、鱼眼摄像头、景深摄 像头、车车通信(v2v)传感器、车与环境通信(v2x)传感器。其中每个传感器都 有一个反射波的能量检测阈值,如果被检测物体的反射波能量低于阈值,则定物体没 有被检测到。
激光雷达和毫米波雷达类似,激光雷与毫米波雷达不同的是,激光雷达采用的是 激光束,工作频率比微波高了很多,因此激光雷达的探测精度高,其精度可以高达几 厘米,可以识别探测目标的轮廓形状,但是激光雷达的数据量较大,易受雾、雨、雪 等天气影响,同时价格也较为昂贵。
超声波雷达,超声波雷达测距范围较小,成本低廉,方向性好,能量消耗缓慢, 在价值中超声波雷达收发器是基于高频声波,其声波频率大于 20KHz。摄像头传感器在智能化驾驶中的作用也越来越大。随着图像处理技术的发展,摄像头的功能也愈发强大,包括人脸识别、驾驶员疲倦检测、行人识别、车道线检测、 车距检测、交通标示识别。
PreScan 软件中的摄像头传感器可以将图像数据(例如像素单元数据)发送给 Simulink,进而 Simulink 可以实现软件在环(SIL software in the loop)的方式对主动 安全控制算法进行验证和优化,例如上文所提到的车道线检测,目标检测等。
在开发主动安全的视觉新算法过程中,PreScan 软件中提供了调教对比用户自己的开发的图像处理算法用的“参考标准传感器(Ground-truth sensors)”。参考标准传 感器包含景深摄像头(Depth camera),车道线识别传感器(Lane marker sensor),分析车道识别传感器(Analytical Lane marker sensor),边缘检测传感器和目标检测传感 器(Bounding Rectangle Sensor & Object Camera)。
在 PreScan 软件中还有一种标定视觉算法的传感器,边界矩形传感器/物体检测摄 像头。边界矩形传感器的主要功能是提供被检测物体的边界矩形(bonding box),并且在 3D 观察窗口和 Simulink 软件中显示检测结果。该传感器可以应用在摄像头传感 器输入信号的物体检测逻辑算法。
PreScan 软件和 MATLAB/Simulink 软件可以相互调用,具体来说就是 PreScan 中 的各种传感器仿真数据传递到 Simulink 中,Simulink 进行逻辑判断和验证各种主动安 全的算法,汽车动力学仿真软件(例如 TESIS-dynaware、CarSim、IPG、CarMaker、 dSPACE)可以计算得到即时的车辆运动情况参数,PreScan 软件再利用车辆运动参数 得到整体的仿真,并且影响传感器的运动和探测到的数据,由此得到一个封闭的多个 软件共同联合仿真的主动安全开发仿真系统,可以实现软件在环、驾驶员在环、硬件在环。
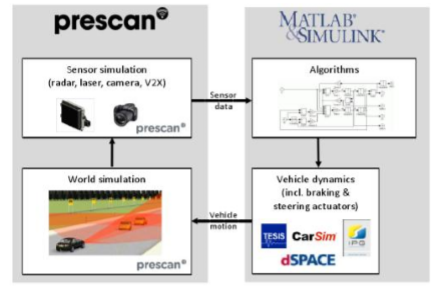
图 3.2 PreScan、CarSim、Simulink 联合仿真结构
MATLAB/Simulink 软件可以实现对汽车主动安全系统的逻辑控制决策层进行编 程。其中,Simulink 是一个图形界面编程软件,不用编写程序代码,而可以使用各种 Simulink 中的工具包,利用拖拽并连接图形化的逻辑控制模块,从而不用大量书写程序,就可以快速地建构出复杂准确的模型。Simulink 也可以利用 code generation 功能 快速生成面对各种硬件的控制代码,从而为后期的硬件功能实现做准备。
■ 场景与传感器模型建立
1.场景建立
在 Euro-NCAP 测试工况中,目标车与本车都是位于同一直线。在 PreScan 软件 中可用 GUI 模块,在道路片段(Road Segment)中搭建一条 5 车道长度为 1km 直线 道路,天气晴朗,太阳高度与位置缺省,太阳光线亮度缺省。车辆道路场景如图 3.3 所示。

2.2 汽车AEB测试场景
目标车选用 Audi A8 作为目标车,其车辆相关参数选用缺省设置。由于目标车需 要创造不同的工况场景,所以在本文中参考 Euro-NCAP 中 CCRs、CCRm、CCRb 三 个场景,目标车运动情况为匀速运动、匀减速运动和静止。设置车辆运动速度在 PreScan 软件的 GUI 模块中,定义一条路径(path),在路径中轨迹(Trajectories) 中编辑速度概述(Speed Profile)中设置。
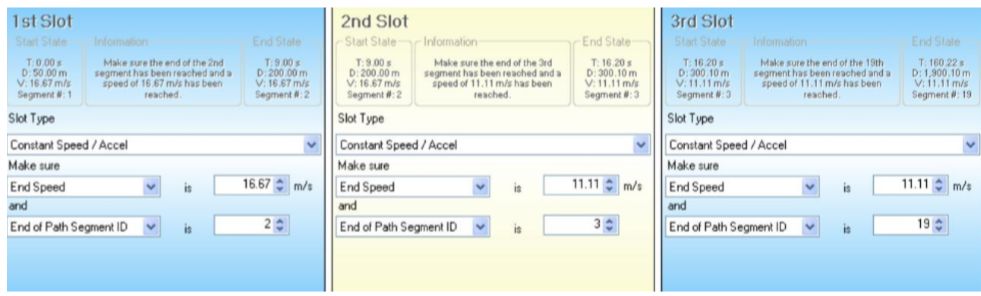
在车辆轨迹设置如图 3.4(a)所示,车辆可以设定多条不同路线的轨迹,但是激 活的轨迹只能为一条。车辆的速度设置如图 3.4(b)所示,可以按照不同的位置(slot) 设置,轨迹的速度类型可以分为匀速(constant speed)、匀加速(constant Accel), 并且设置每一部分路径的终点速度(End Speed),最终设置车辆的轨迹路线及不同 时间的车速情况。

(a)
 (b)
(b) 图 3.4 (a)PreScan 中路径选择 (b)PreScan 中车速的配置
2. 传感器建立
本文研究在毫米波雷达传感器的前方碰撞自动制动算法,主要研究目标为本车与 前方车辆。传感器设置为 Sensor 模块中的 TIS(独立技术传感器 Technology Independent Sensor)传感器,TIS 是通用的扫射传感器模型,可以通过改变参数模拟 雷达、激光雷达、超声波雷达。本文将 TIS 传感器设定为两个雷达传感器,一个为长 距离雷达(LRR Long Range Radar)、短距离雷达(SRR Short Range Rada)。长距 离雷达:探测距离 150m,水平探测角度范围是 9◦。;短距离雷达:探测距离 30m, 水平探测角度范围是 80◦,雷达的波形都为角锥(Pyramid)。雷达的安装位置在本车 的保险杠内部正中间,雷达型号发射方向水平朝向前方。
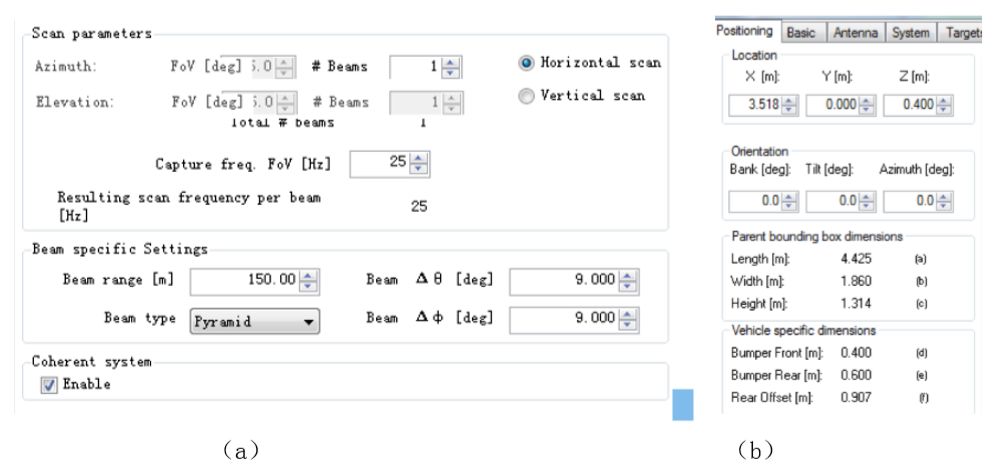 图 3.5 (a)TIS 波束参数配置 (b)TIS 安装位置配置
图 3.5 (a)TIS 波束参数配置 (b)TIS 安装位置配置 3. 驾驶员输入硬件配置
车辆动力学模型采用前文在 CarSim 软件中建立的车辆动力学模型。在 PreScan 的车辆模型里建立由驾驶员控制的车辆动力学模:在本车的车辆配置中选择目标设置 (object configuration),在 Driver Model 中选择 Man-in-the-loop,其他选择默认选项。DIL 的车辆模型可以设置为手动挡(Manual)和自动挡(Automatic)。
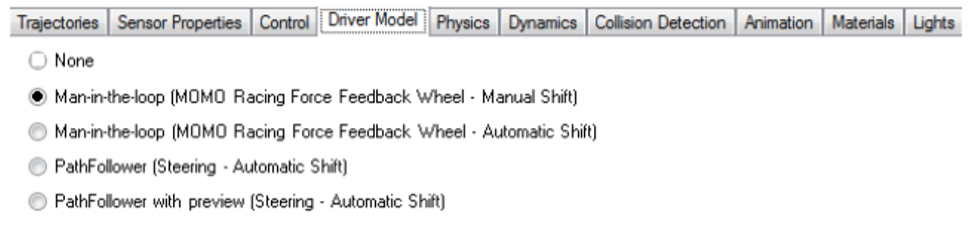
图 3.6 PreScan 中驾驶员在环配置
PreScan 是结合 Simulink 软件联合使用的,在 PreScan 软件的 GUI 模块中搭建好场景与传感器模型后,需要生成 Simulink 软件中.mdl 文件,

图 3.7 Simulink 生成的 PreScan 模型
在 Simulink 模型中需要将各个内部模块之间的输入和输出接口用线连接起来。驾驶员在环系统仿真设计如图 3.8 所示:

图 3.8 DIL 的 Simulink 模型
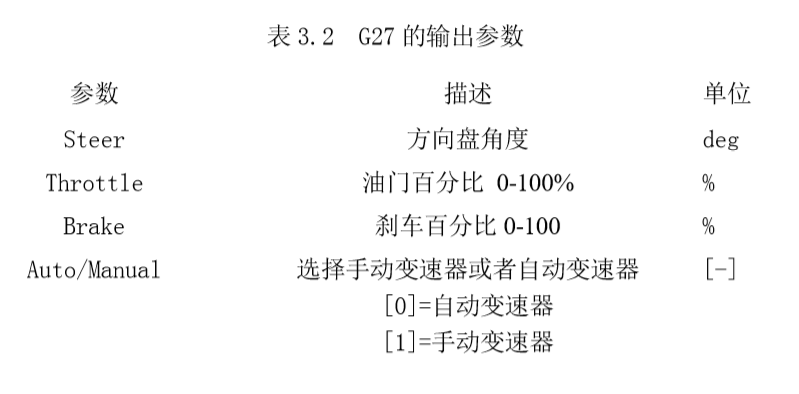
罗技 G27 方向盘不允许同时使用刹车和油门。仿真时间等于真正的时间,可以 将将"仿真时间尺度(在 Experiment-simulation scheduler 中修改 simulation time)"的 值更改为 1。在 Simulink 中 G27 输出端口设置如下表所示。
■ 本章小结
本文介绍了 PreScan 软件的基本模块及其功能设置;建立了场景模型、传感器模 型;配置利用罗技 G27、高性能计算机硬件和 CarSim、PreScan、Simulink 软件建立 了驾驶员在环的 AEB 系统测试仿真平台。
牛喀学城于11月23日,将开展为期两天的《ACC和AEB系统功能架构和算法应用技术高级培训》。由国际顶级的汽车零部件企业ADAS专家主讲,深入介绍ACC,AEB,TJA系统的功能架构,算法及测试技术,课程详情如下:
本期文章到此结束,下期《AEB系统控制算法》,请锁定牛喀网公众号,为您带来技术干货!

| 十一月精品课程 | |
| 11/09-11/10 | ISO26262软件功能安全技术培训 |
| 11/16-11/17 | Adaptive AUTOSAR软件架构开发实践技术 |
| 11/16-11/17 | 汽车电子硬件设计和开发技术培训 |
| 11/23-11/24 | ACC和AEB系统架构和功能开发技术培训 |
| 11/30-12/01 | QNX智能汽车操作系统技术培训 |
| 十二月精品课程 | |
| 12/07-12/08 | ISO26262软件功能安全技术培训 |
| 12/14-11/15 | ADAS功能安全设计与开发技术培训 |
| 12/21-11/22 | 汽车电子硬件设计和开发技术培训 |
| 12/27-12/29 | 77G毫米波雷达设计及第五代雷达前沿技术培训 |
 喜欢本文给我们点个在看吧^_^➡️
喜欢本文给我们点个在看吧^_^➡️






