接线图:
这里将信号线连接到了开发板的PA1上

代码配置:
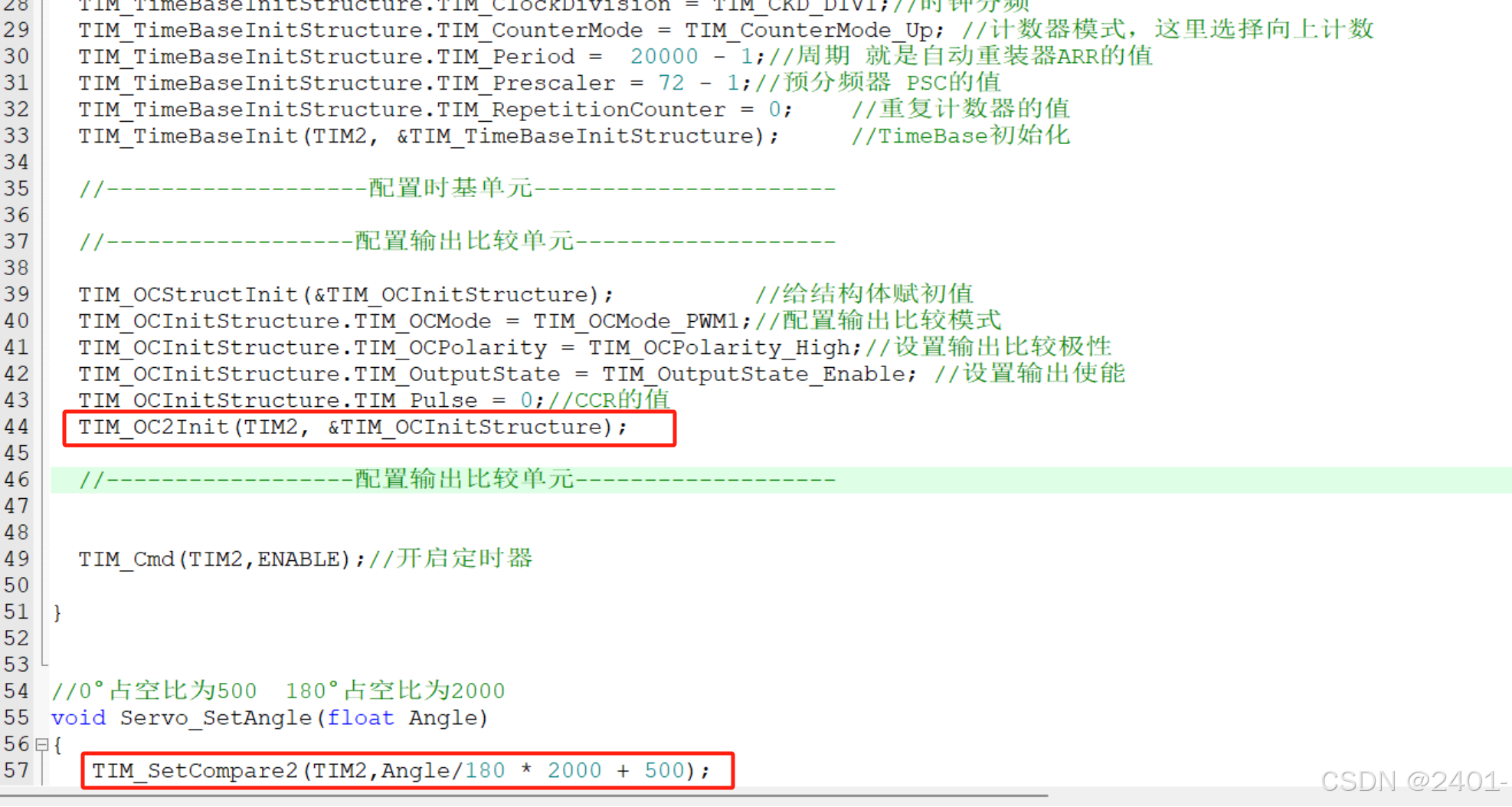
这里的PWM配置与呼吸灯一样,呼吸灯连接的是PA0引脚,输出比较单元用的是OC1通道,这里只需改为OC2通道即可。
完整代码:
#include "servo.h"void servo_Init(void)
{//-----------------定义结构体变量----------------------GPIO_InitTypeDef GPIO_InitStructure; //定义GPIO结构体变量TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;//定义TimeBase结构体变量TIM_OCInitTypeDef TIM_OCInitStructure; //定义OC结构体变量//-----------------定义结构体变量----------------------//配置时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//打开GPIO时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//打开TIM2时钟//-----------------配置GPIO----------------------------GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//选择复用推挽模式GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //配置引脚GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速率GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO初始化//-----------------配置GPIO----------------------------//-------------------配置时基单元----------------------TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,这里选择向上计数TIM_TimeBaseInitStructure.TIM_Period = 20000 - 1;//周期 就是自动重装器ARR的值TIM_TimeBaseInitStructure.TIM_Prescaler = 72 - 1;//预分频器 PSC的值TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器的值TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //TimeBase初始化//-------------------配置时基单元----------------------//------------------配置输出比较单元-------------------TIM_OCStructInit(&TIM_OCInitStructure); //给结构体赋初值TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//配置输出比较模式TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//设置输出比较极性TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置输出使能TIM_OCInitStructure.TIM_Pulse = 0;//CCR的值TIM_OC2Init(TIM2, &TIM_OCInitStructure);//------------------配置输出比较单元-------------------TIM_Cmd(TIM2,ENABLE);//开启定时器}//0°占空比为500 180°占空比为2000
void Servo_SetAngle(float Angle)
{TIM_SetCompare2(TIM2,Angle/180 * 2000 + 500);}主函数:
实现了通过按键控制舵机
#include "Servo.h"
int main(void)
{LED_Init();OLED_Init();KEY_Init();servo_Init();uint16_t Angle = 0;OLED_ShowString(1, 1, "Angle:");while(1){if(KEY_Scanf(GPIOB,GPIO_Pin_1) == 1){Angle += 30;if(Angle >= 180){Angle = 0;}}Servo_SetAngle(Angle);OLED_ShowNum(1, 7, Angle, 3); } }
![6 [新一代Github投毒针对网络安全人员钓鱼]](https://i-blog.csdnimg.cn/img_convert/e85256dced51954e871747f163eccf32.png)


