开发需求背景
今天领导派了一个小活,要求我将公司的物联网平台的网络拓扑图画出来。做一个数据展示的页面,集成到现有的iot平台上。
说到拓扑图,大家都也都比较清楚,能够清晰地表示网络链路的链接关系。
官方一点的解释是:
网络拓扑结构是指用传输媒体互连各种设备的物理布局(将参与LAN工作的各种设备用媒体互连在一起有多种方法,但是实际上只有几种方式能适合LAN的工作)。
网络拓扑图是指由网络节点设备和通信介质构成的网络结构图。
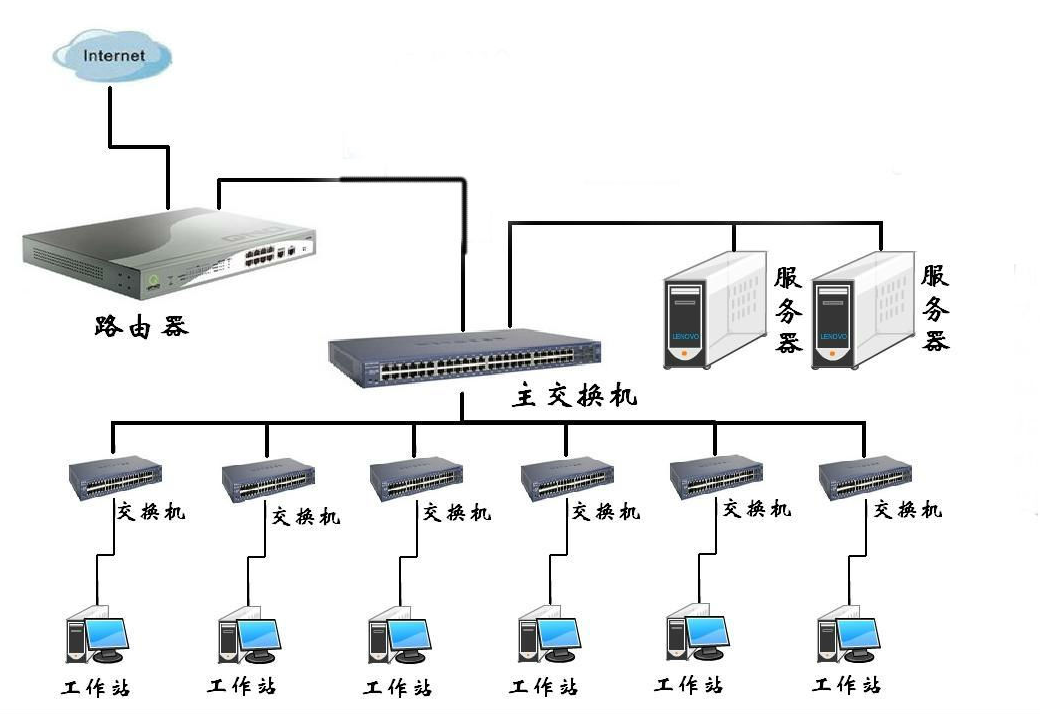
一般的拓扑图都是这样子的
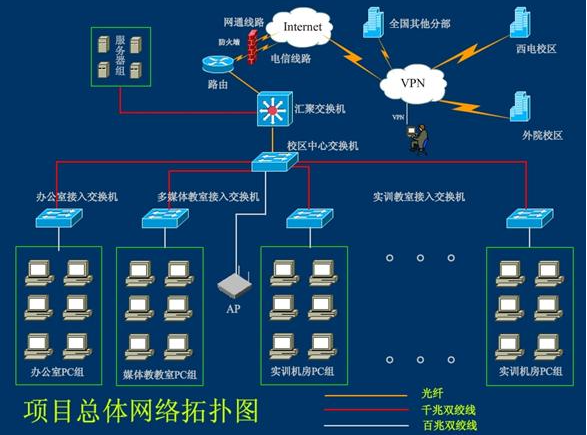
还有这一种
这些设计图都是架构师使用软件画出来的,数据都是固定的,不支持动态修改,没有动效,而我们需要支持动态添加网络节点。需要有动效。
经过一天不歇的努力,终于在下班前做出来了一个原型图。
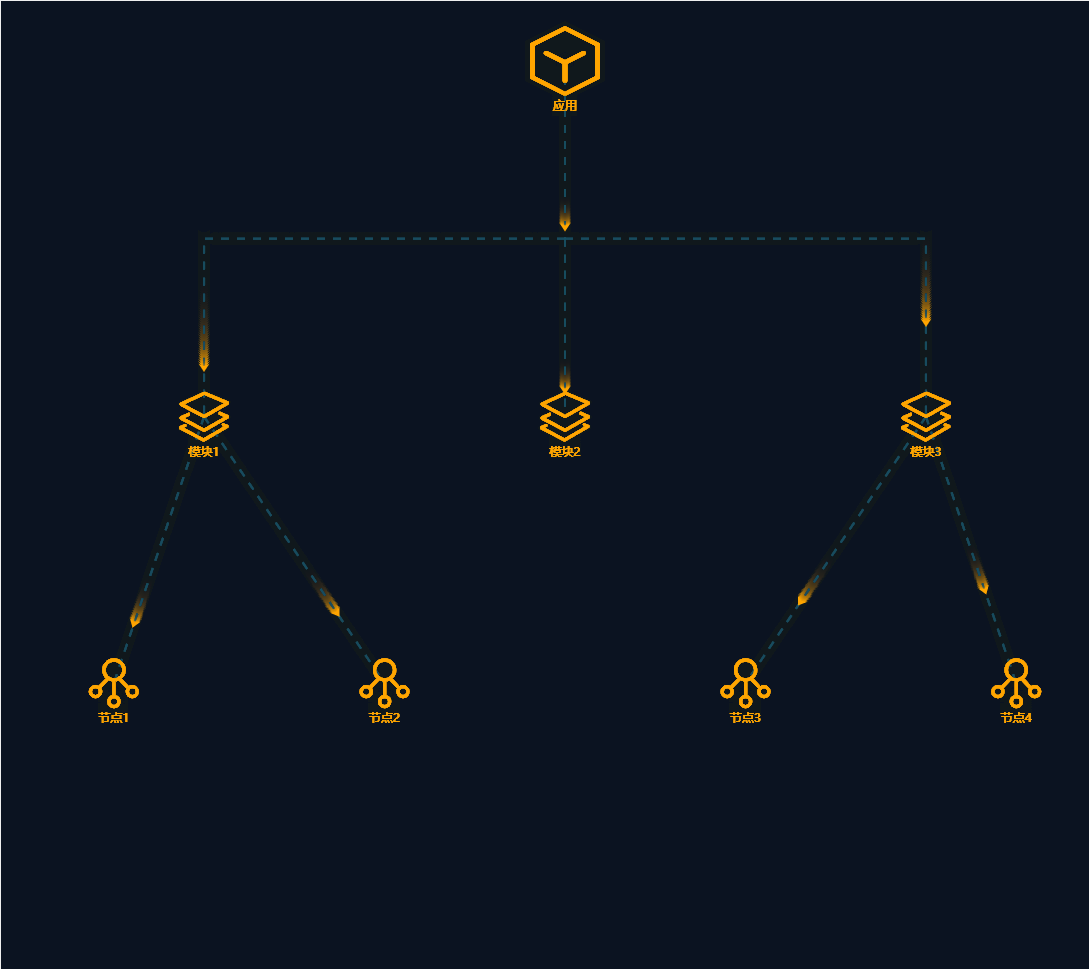
先给大家看看,下面来详细讲解如何使用echarts一步一步完成这个拓扑图的。
技术调研
接到需求后我调研了几个物联网仪表盘后,我觉得使用echart来试试,因为d3太难了。😃
拓扑图中需要与几个实体,代表链路中的每一个设备,一个设备可能有进线,有出线,也有可能有多条线,线的条数都不能固定的。因为随着设备的增加,中央机器到达各个设备的线也是逐渐增加的。设备之间有线,有了线,就要有流量的流动,就是在线上方覆盖一个箭头,逐渐从数据的发出方到达数据的接受方。此外每台设备都要有个名称,鼠标放到设备上,需要有一个动效,最好能显示一些详细情况。
ok
需求分析完毕,一个图大致有以下几个视图
- 设备
- 设备之间的线
- 线上的流量流向箭头
- 设备的附加信息
- 其他动效
开始编码
在真正的编码开始之前,我们需要对这个需求有个抽象的概念,怎么抽象那?
我们可以将设备,线,箭头,都看做物品,而这些物品都存在于一个平面直角坐标系上。有了平面直角坐标系也就有了他们各自的位置。
比如设备1的坐标是x: 500 y: 1000, 设备2的坐标是 x: 500 y: 600
那么设备2就是在设备1的下方。 而设备1到设备2的链接,也就是好说了, 这条线段的的气质坐标是{x: 500 y: 1000} => {x: 500, y: 600}
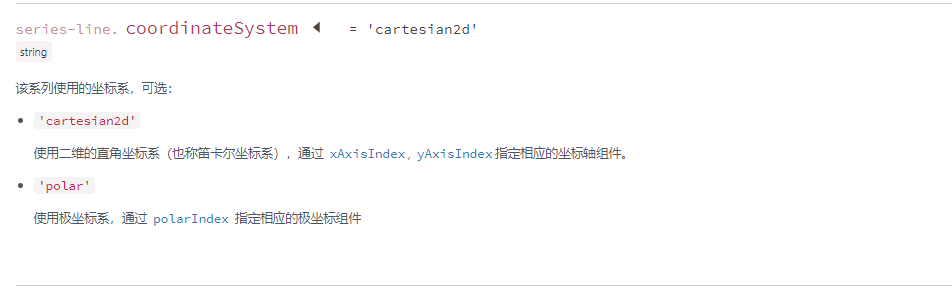
这样就非常容易理解了。而echarts是支持 使用二维的直角坐标系(也称笛卡尔坐标系)。
具体设置是在series 中的一些类型下, 设置coordinateSystem 为cartesian2d
官方文档的解释。
思路清晰了,我们先来做一个简单的。
先画出二个设备,然后再连线。
定义二个设备
{x: 500,y: 1000,nodeName: '服务器',svgPath: 'M544 552.325V800a32 32 0 0 1-32 32 31.375 31.375 0 0 1-32-32V552.325L256 423.037a32 32 0 0 1-11.525-43.512A31.363 31.363 0 0 1 288 368l224 128 222.075-128a31.363 31.363 0 0 1 43.525 11.525 31.988 31.988 0 0 1-11.525 43.513L544 551.038z m0 0,M64 256v512l448 256 448-256V256L512 0z m832 480L512 960 128 736V288L512 64l384 224z m0 0',symbolSize: 70,
},
{x: 500,y: 600,nodeName: '设备1',svgPath: 'M1172.985723 682.049233l-97.748643-35.516964a32.583215 32.583215 0 0 0-21.830134 61.582735l25.7398 9.123221-488.744218 238.181638L115.670112 741.349163l47.245961-19.223356a32.583215 32.583215 0 0 0-22.808051-60.604819l-119.579777 47.896905a32.583215 32.583215 0 0 0 0 59.952875l557.820313 251.540496a32.583215 32.583215 0 0 0 27.695632 0l570.527227-278.584184a32.583215 32.583215 0 0 0-3.258721-59.952875z,M1185.041693 482.966252l-191.587622-68.749123a32.583215 32.583215 0 1 0-21.831133 61.254764l118.927833 43.010323-488.744218 237.855666-471.474695-213.744727 116.973-47.244961a32.583215 32.583215 0 1 0-24.111938-60.604819l-190.609705 75.593537a32.583215 32.583215 0 0 0-20.528246 29.650465 32.583215 32.583215 0 0 0 20.528246 30.30141l557.819313 251.866468a32.583215 32.583215 0 0 0 27.695632 0l570.201254-278.584184a32.583215 32.583215 0 0 0 18.24744-30.953354 32.583215 32.583215 0 0 0-21.505161-29.651465z,M32.583215 290.075742l557.819313 251.540496a32.583215 32.583215 0 0 0 27.695632 0l570.201254-278.584184a32.583215 32.583215 0 0 0-3.257721-59.952875L626.244463 2.042365a32.583215 32.583215 0 0 0-23.134022 0l-570.527226 228.080502a32.583215 32.583215 0 0 0-19.224357 30.627382 32.583215 32.583215 0 0 0 19.224357 29.325493zM615.817355 67.534767l474.733416 170.408432-488.744218 238.180638-471.474695-215.372588z'
},
x, y 代表设备的坐标, nodeName定义了设备的名称, svgPath是使用svg的指令语法来生成一个设备图标。
效果图
定义连线
{coords:[[500, 1000],[500, 800],]},{coords: [[500, 800],[500, 600],]},
效果图
解释:
coords作为一个数组,存放的是几个点的坐标
[[500, 1000],[500, 800],
]
数组的第一个元素表示起点,第二个元素表示终点
那么这条线段就是从 x500,y1000 到达 x500,y800
完整的代码
var nodes = [{x: 500,y: 1000,nodeName: '应用',svgPath: 'M544 ',symbolSize: 70,}, {x: 100,y: 600,nodeName: '模块1',svgPath: 'M1172. '},{x: 500,y: 600,nodeName: '模块2',svgPath: 'M1 615.817355 67.534767l474.733416 170.408432-488.744218 238.180638-471.474695-215.372588z'},{x: 900,y: 600,nodeName: '模块3',svgPath: 'M117 615.817355 67.534767l474.733416 170.408432-488.744218 238.180638-471.474695-215.372588z'},{x: 0,y: 300,nodeName: '节点1',svgPath: 'M887.5 68 68.25472-68.224 68.28544l-0.06144-0.06656z',},{x: 300,y: 300,nodeName: '节点2',svgPath: 'M88 37.71392 0 68.29056 30.57152 68.28544 68.29056 0 37.68832-30.53568 68.25472-68.224 68.28544l-0.06144-0.06656z',},{x: 700,y: 300,nodeName: '节点3',svgPath: 'M887.55 25472-68.224 68.28544l-0.06144-0.06656z',},{x: 1000,y: 300,nodeName: '节点4',svgPath: 'M887.55 0.53568 68.25472-68.224 68.28544l-0.06144-0.06656z',},
]
var charts = {nodes: [],linesData: [{coords: [[500, 1000],[500, 800],]}, {coords: [[500, 800],[100, 800],[100, 600]]}, {coords: [[500, 800],[500, 600],]}, {coords: [[500, 800],[900, 800],[900, 600]]},{coords: [[100, 600],[0, 300]]},{coords: [[100, 600],[300, 300]]},{coords: [[900, 600],[700, 300]]},{coords: [[900, 600],[1000, 300]]}]
}
for (var j = 0; j < nodes.length; j++) {const {x,y,nodeName,svgPath,symbolSize} = nodes[j];var node = {nodeName,value: [x, y],symbolSize: symbolSize || 50,symbol: 'path://' + svgPath,itemStyle: {color: 'orange',}}charts.nodes.push(node)
}option = {backgroundColor: "#0B1321",xAxis: {min: 0,max: 1000,show: false,type: 'value'},yAxis: {min: 0,max: 1000,show: false,type: 'value'},series: [{type: 'graph',coordinateSystem: 'cartesian2d',label: {show: true,position: 'bottom',color: 'orange',formatter: function(item) {return item.data.nodeName}},data: charts.nodes,}, {type: 'lines',polyline: true,coordinateSystem: 'cartesian2d',lineStyle: {type: 'dashed',width: 2,color: '#175064',curveness: 0.3},effect: {show: true,trailLength: 0.1,symbol: 'arrow',color: 'orange',symbolSize: 8},data: charts.linesData}]
};
这里svg的指令太多,我删减了一部分,具体的动效图。
技术回顾
使用echart画物联网各种仪表盘时,掌握坐标系就掌握了各个物体的位置。随你发挥.
此外需要注意一下,我们的设备图表使用的是series-graph 可以用于展现节点以及节点之间的关系数据。
写在最后
掌握住echarts的配置项,可以画出很多精美的仪表盘,后续我和大家继续分享其他的物联网相关的仪表盘.如果文章对你有帮助,请记得点赞留言。