一、开箱
Nvidia Jetson AGX Orin是今年Nvidia推出的唯一的开发套件,相比Jetson Nano 472GFLOP算力、Jetson Xaiver 32TOPS(INT8)算力,它的算力达到了200 TOPS左右。也就是说,几乎相当于目前主流设备的8-10倍的算力。这就让张小白有点动心了。于是,张小白天天啃包子省吃俭用,攒下了一台设备的价钱,并火速将设备拿到了手。

说实话,拿到这样的箱子着实有点害怕,毕竟里面的东西不便宜。然而,打开包装,并进行消毒之后:

这么方方正正的盒子,确实让人有点放心了。
我们四周看一看:

侧面和底面都有封条。
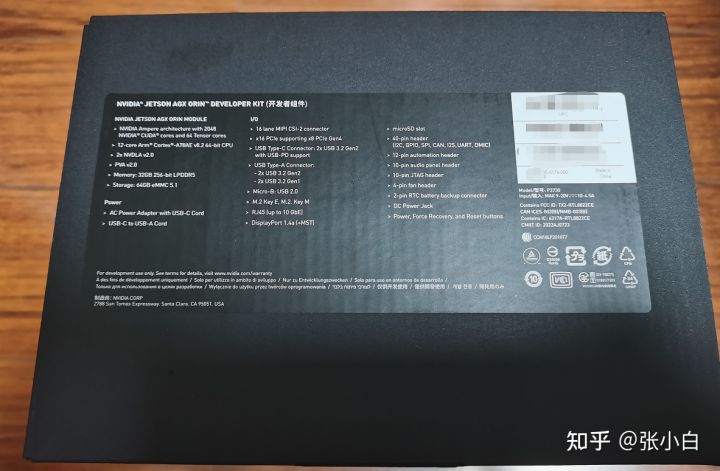
有一侧写着设备的各种指标。
于是张小白用裁纸刀开箱:

映入眼帘的是个像音响一样的东西。
拿出来一看:

银灰色的机身,里面的大风扇隐约可见。

这是右面——正确的一面(Right View),对应说明书:
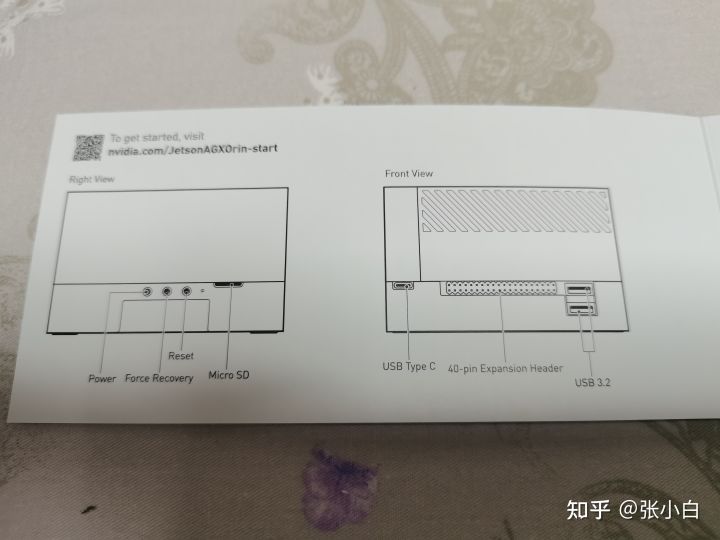
分别是 电源键(Power),强制恢复键(Force Recovery)和重置键(Reset)。还有个TF卡的插槽。
右面旁边的一面叫背面(Back View):

对比说明书:
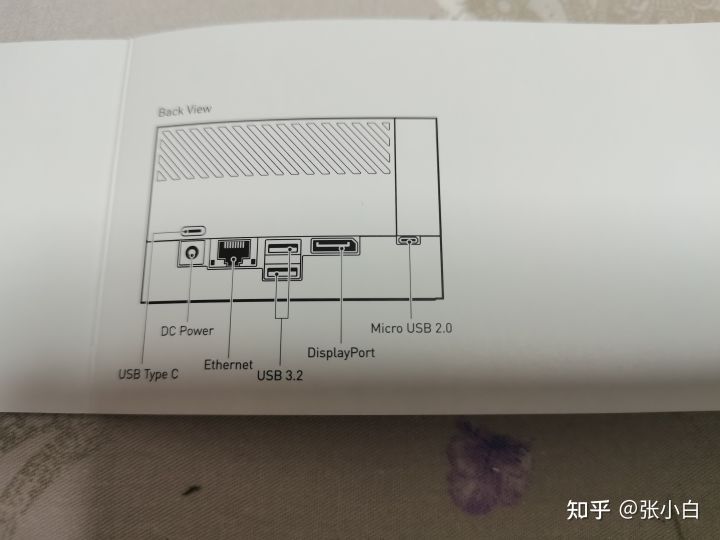
分别是:
(1)USB Type-C,这个接口是接电源的地方。
(2)DC Power是很奇怪的接口,好像目前并没有接头能插进去。
(3)有线网口
(4)上下错落着2个USB 3.2的接口,张小白打算用来接键盘和鼠标
(5)DisplayPort,是目前唯一的显示器接口
(6)Micro USB的接口,大概是可以用作串口吧。
背面旁边的一面看起啥也没有:

对比说明书:

你可以把它轻轻掀开:

有一个PCIe的接口,壳子上还有2根WiFI天线,说明它是自带无线网卡的。
再转过去,就到了正面(Front View):

左边是个Type-C接口,中间是40Pin接口,右边是两个USB3.2的接口。
我们再悄悄看看底面:

有个接M2的硬盘接口,有2个摄像头的接口。右下角应该是前面看到的TF卡槽。这块板子好像还是Made in China。
我们把装Orin设备的盒子拿出去后:

下面还有个附件的盒子:

打开看看:

上面是说明书(刚才拍过了)和电源适配器,下面是几股线缆:

有USB转Type=C的线,估计可以用接电脑。
下面是三根电源线:

根据电源插头的不同,估计是美标,英标插头之类的。反正有中国的插头就行:

AC电源适配器,也是中国制造。

电源适配器的另一头是Type-C插头,所以应该是接上前面Right View左上角那个Type-C的接口。
DisplayPort的接口有点奇怪:

好在张小白的小米曲面屏显示器有这个接口,张小白也有这跟DP线:

开箱到此结束。
二、开机
张小白打开说明书提供的链接:
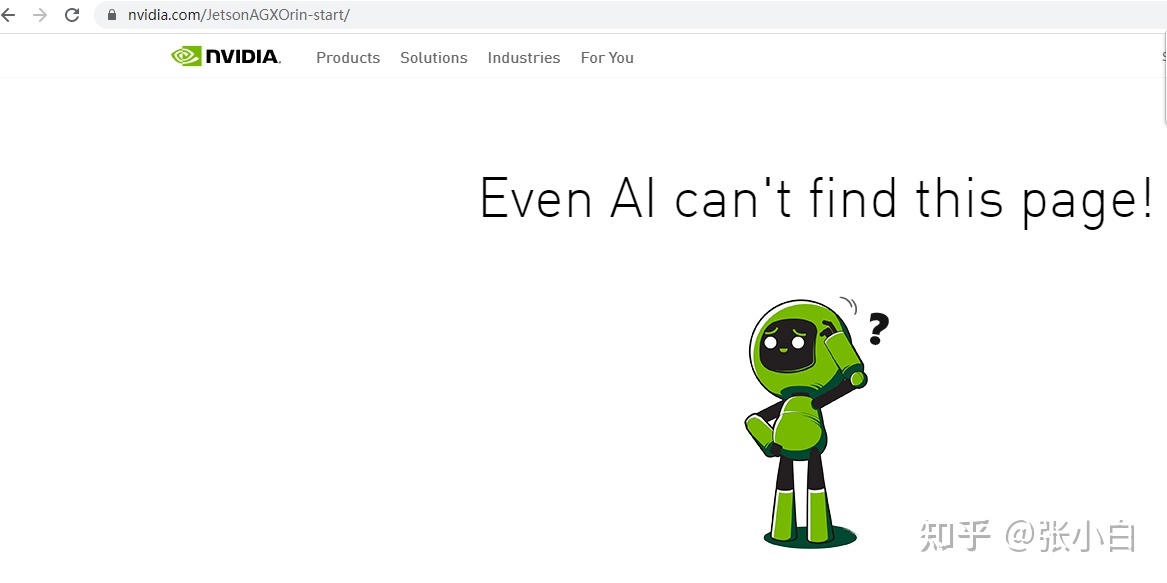
只好求助于Nvidia的专家,获得了这个地址: https://developer.nvidia.com/embedded/learn/get-started-jetson-agx-orin-devkit
那就根据这个链接来Getting Started吧!
先把各种线接好:
(1)DP接口连显示器;
(2)电源线连DC口上面的Type-C口;
(3)机械键盘和鼠标连接2个USB 3.2的接口;
(4)有线网口暂时不接,因为有无线网卡。

开机,显示器切换到DP1:
不一会儿,进入Ubuntu的系统设置界面:
靠近点看:
accept后点击continue:

选择语言——中文(简体),继续:
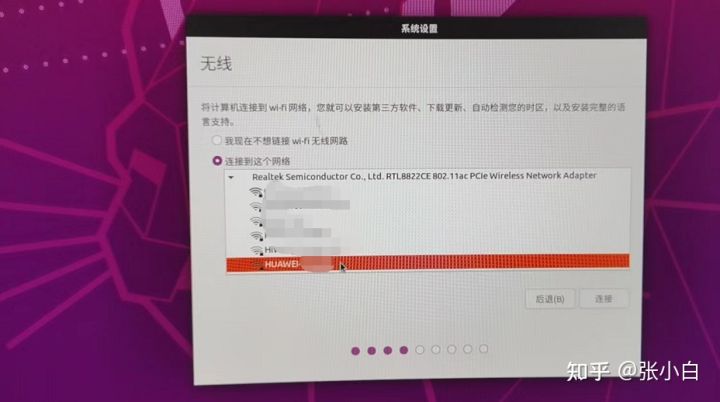
连接无线网络,选择华为路由器的网络,点击 连接:
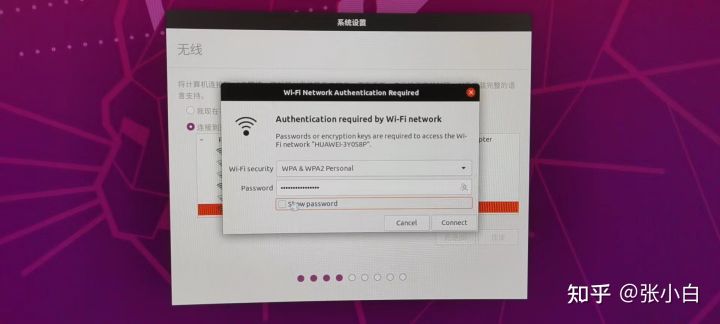
输入密码,connect:

选择时区——上海,继续:

输入计算机名称,登陆用户名和密码等信息,继续:
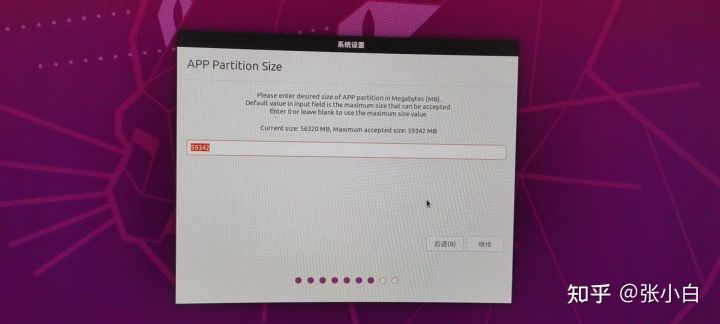
要求输入分区大小,看了下提示,输入0,继续:
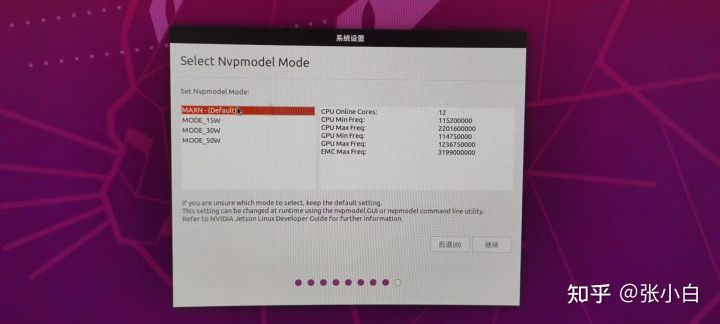
设置Nvpmodel的Model,先选缺省的,继续:
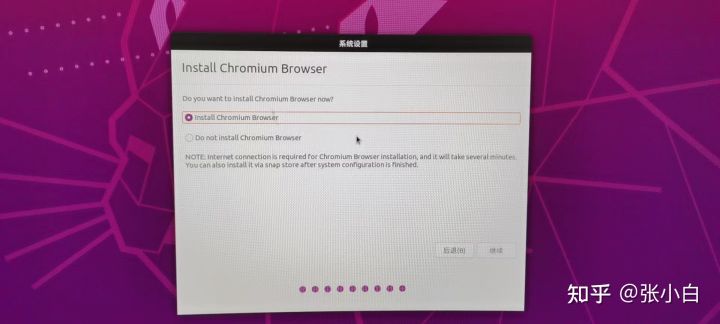
问你要不要安装个浏览器,那就装吧:
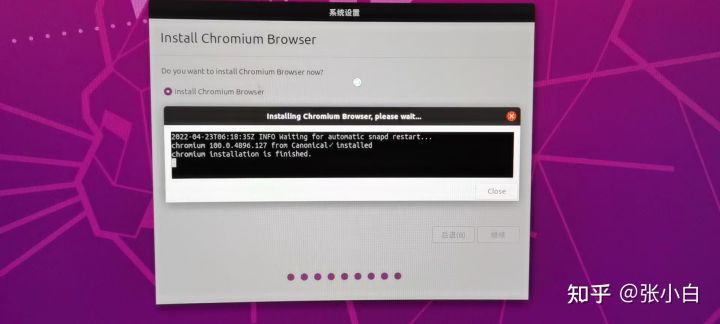
耐心等待安装完毕,点击Close。
系统会继续进行安装:
直到进入登陆界面:

输入前面设置的密码后进入Ubuntu的桌面:

在弹出的页面中点击Skip:
选择No,点击Next:
Next:
Done。
系统问要不要升级包:
先选择Remind Me Later吧。
根据前面链接中的指引,打开终端:
sudo apt dist-upgrade
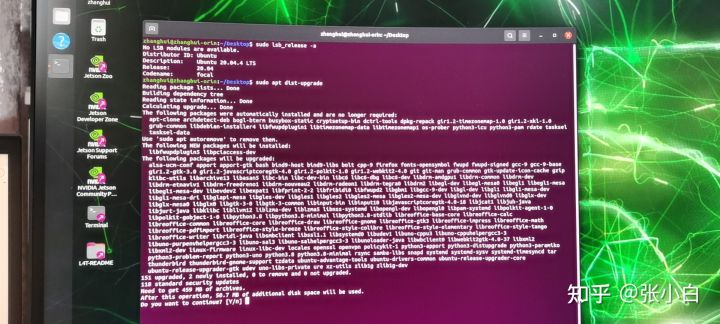
按Y继续:

耐心等待upgrade完毕:

查看下内存和存储的情况:
内存:

29G左右,估计是32G的内存。还有交换分区14G左右,估计是16G。。这个数字硬件厂商各有统计尺度,此处先不深究。
32G内存国外售价是899美元。国内的价格暂时不谈。。说多了都是泪。
存储:
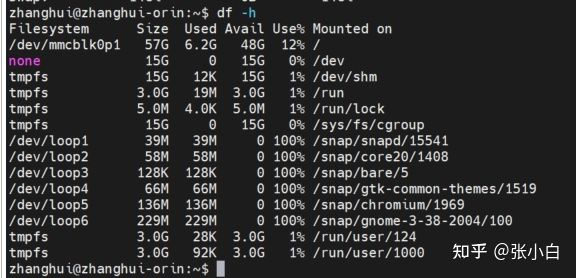
大概是64G的存储,这跟标称的eMMC存储大小基本一致。
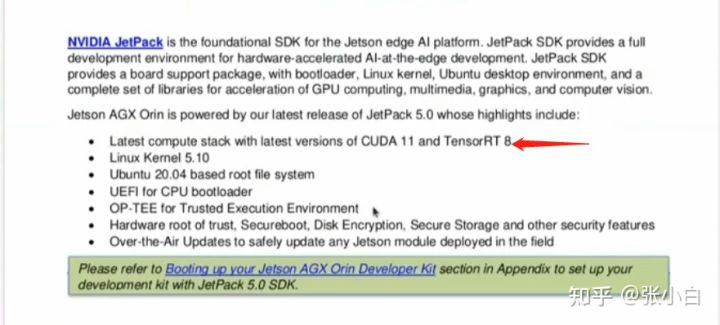
我们开始装Jetpack。据官方要求,Orin设备需要安装Jetpack 5.0。
sudo apt install nvidia-jetpack
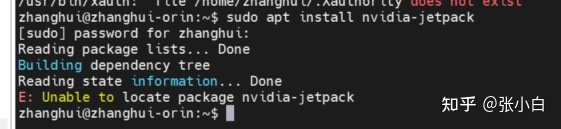
咦?
看了下 /etc/apt/sources.list.d/nvidia-l4t-apt-source.list 文件:
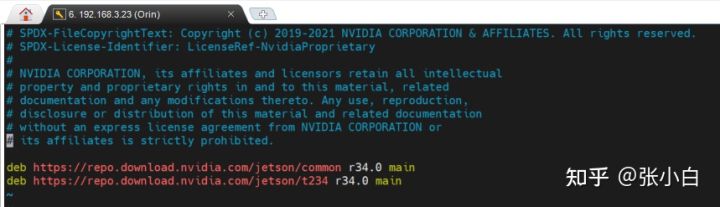
这个源居然找不掉Jetpack包。。。
张小白又匆匆开始搜索,终于在Nvidia论坛发现了一个答案:
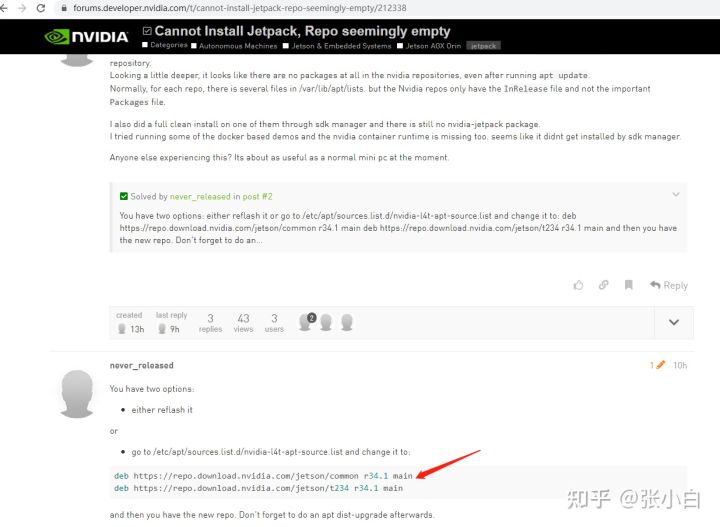
也就是需要将 r34.0改为r34.1才行,就如法炮制:
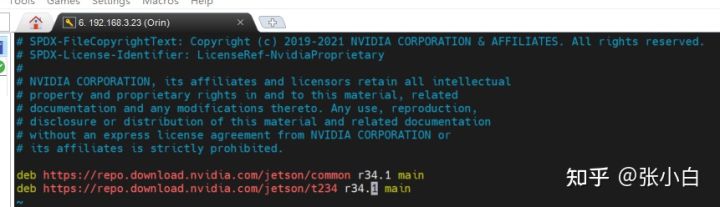
重新执行 sudo apt install nvidia-jetpack

按Y继续:
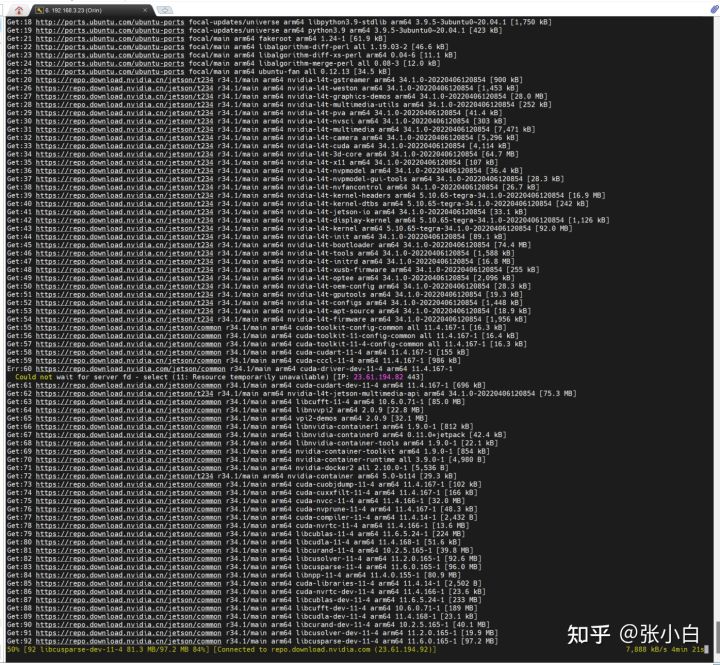
好像报了个错。应该是服务器不大好连。确实nvidia的服务器不大容易连,那就反复多试几次:

耐心等待结束:
再试一次:
嗯。不用试了。应该是安装完毕了。
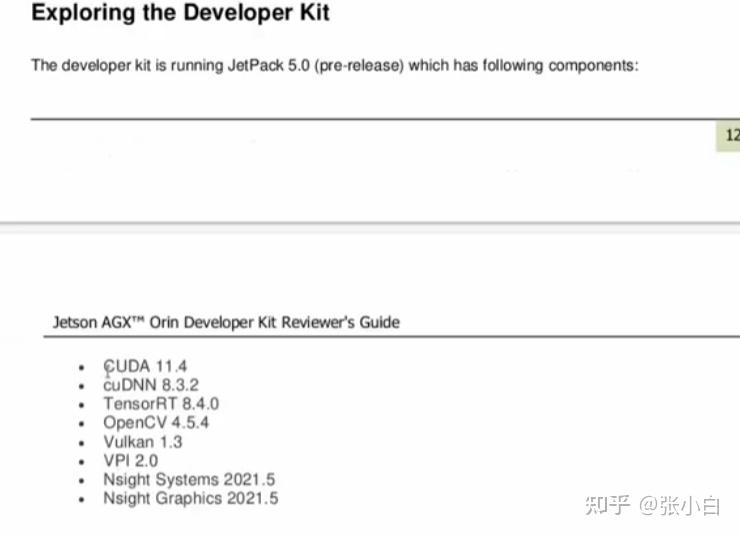
根据官方说明,Jetpack 5.0包含以下组件:
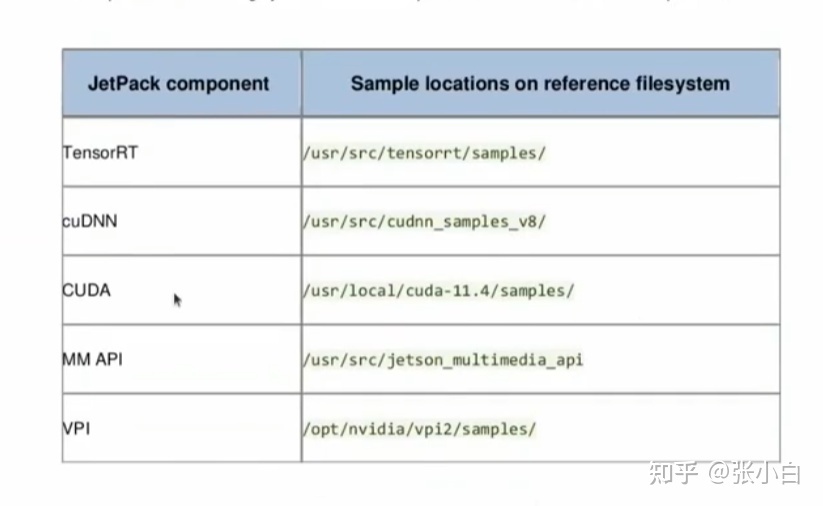
它们的安装位置如下:
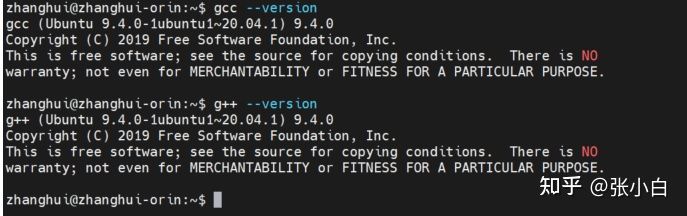
现在检查下目前安装的软件版本:
gcc和g++:9.4.0
CUDA的nvcc编译器:11.4
编辑~/.bashrc

source后生效:
这样就可以在任何地方编译CUDA的代码了。
opencv:4.5

Python:3.8.10,没有装PIP:
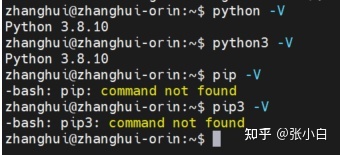
那就装一下吧。
先安装curl:
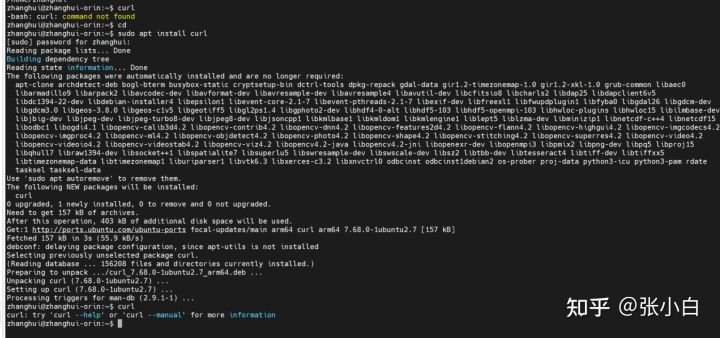
再用curl下载get-pip.py:

然后安装pip:
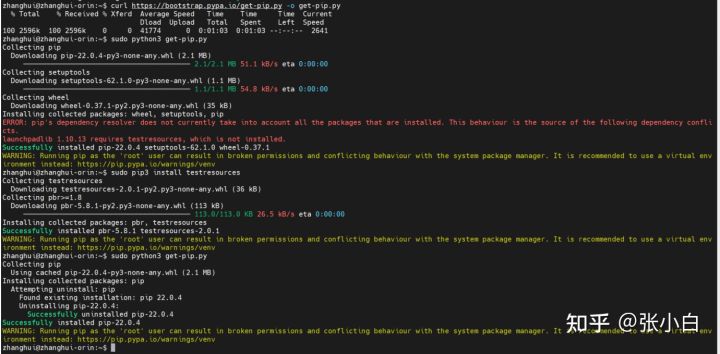
好了,Orin基础环境的安装就先介绍到这里吧。
三、开练
基础软件安装完毕后,当然是对这个设备做一些简单的深度学习尝试了。张小白曾经写过一篇:
张小白:Nvidia Jetson Nano B01初体验1 赞同 · 0 评论文章正在上传…重新上传取消
现在就依葫芦画瓢,看看Orin的表现如何:
LeNet是典型的手写数字识别网络,常用于深度学习初学者的入门,先用它来试一下:
1、cudnn_sample
cudnn_sample 内置了一个LeNet网络的测试,我们来试一下:
先更新下源:
cd /usr/src/cudnn_samples_v8/mnistCUDNN/
开始编译:
sudo make
发现需要安装一些系统依赖包:sudo apt-get install libfreeimage3 libfreeimage-dev

安装完毕后重新编译:

进行测试:
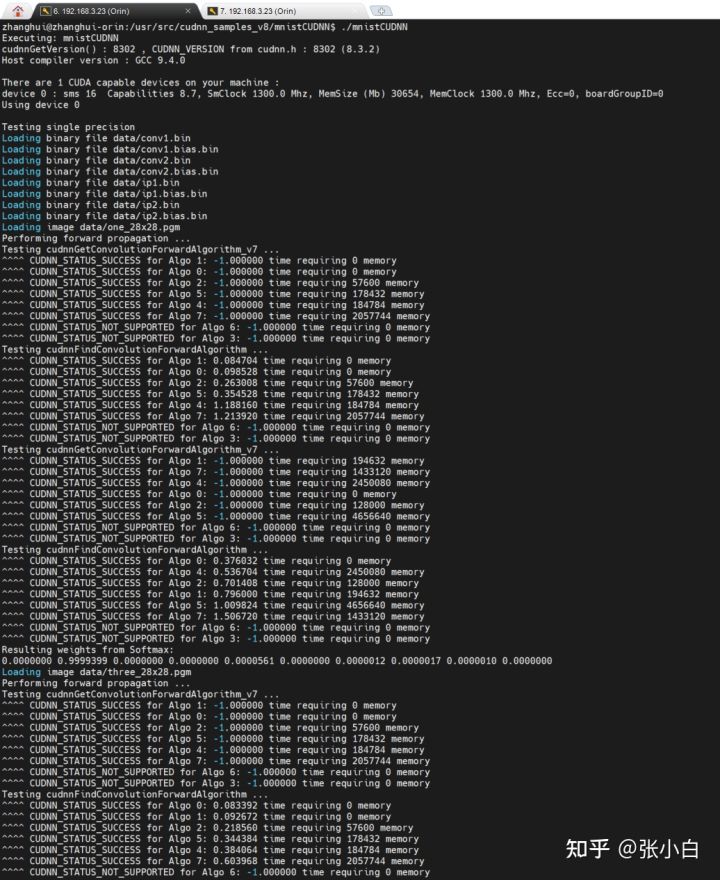
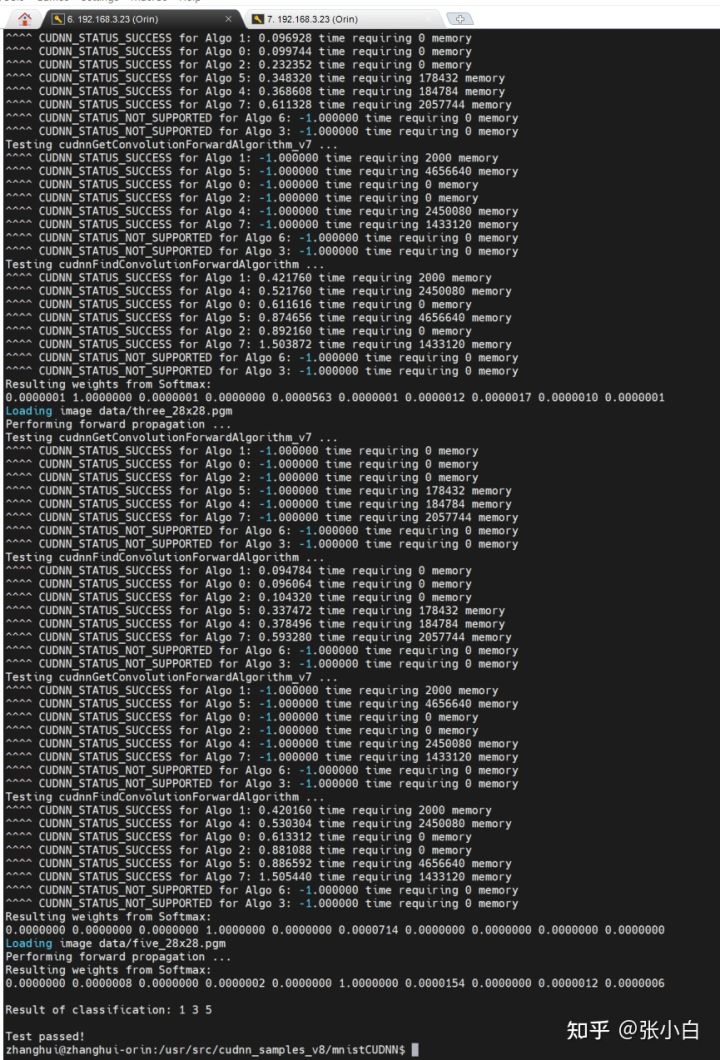
从上面的例子可以看出,相关的图片识别成为1、3、5,识别成功。
2、使用TensorFlow+Keras实现LeNet训练
安装系统依赖包:
sudo apt-get install python3-numpy
sudo apt-get install python3-scipy
sudo apt-get install python3-pandas
sudo apt-get install python3-matplotlib
sudo apt-get install python3-sklearn
sudo apt-get install libhdf5-serial-dev hdf5-tools libhdf5-dev zlib1g-dev zip libjpeg8-dev liblapack-dev libblas-dev gfortran

sudo apt-get install python3-pip
安装PIP依赖包:
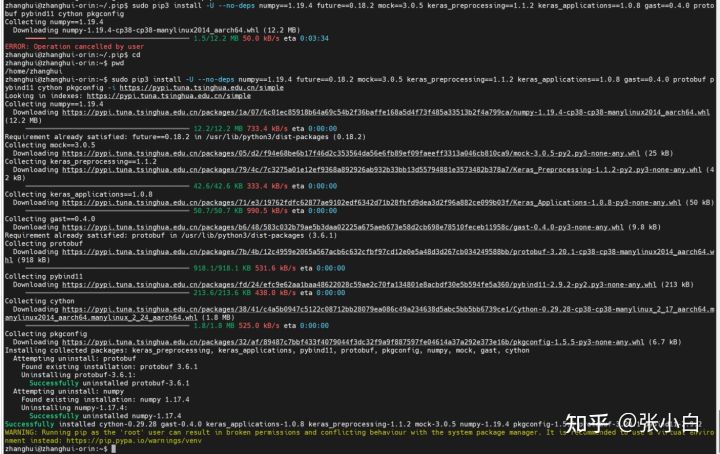
sudo pip3 install -U --no-deps numpy==1.19.4 future==0.18.2 mock==3.0.5 keras_preprocessing==1.1.2 keras_applications==1.0.8 gast==0.4.0 protobuf pybind11 cython pkgconfig -i https://pypi.tuna.tsinghua.edu.cn/simple
sudo env H5PY_SETUP_REQUIRES=0 pip3 install -U h5py==3.1.0
查看下JetPack 5.0 TensorFlow安装盘的地址:

安装TensorFlow1.15:
sudo pip3 install --pre --extra-index-url https://developer.download.nvidia.com/compute/redist/jp/v50 'tensorflow<2'

检查TensorFlow是否成功安装:

安装Keras并检查是否成功安装:
sudo pip3 install keras
准备 keras_lenet.py这个训练LeNet网络的Python代码:(代码来源:https://blog.csdn.net/mr_muli/article/details/80992600 作者:木里先森)
# -*- coding: utf-8 -*-
"""
Created on Tue Jul 10 20:04:03 2018@author: muli
"""import tensorflow.keras
from tensorflow.keras.datasets import mnist
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Dense, Flatten, Conv2D, MaxPooling2D
from tensorflow.keras import backend as Knum_classes = 10
img_rows, img_cols = 28, 28# 通过Keras封装好的API加载MNIST数据。其中trainX就是一个60000 * 28 * 28的数组,
# trainY是每一张图片对应的数字。
(trainX, trainY), (testX, testY) = mnist.load_data()# 根据对图像编码的格式要求来设置输入层的格式。
if K.image_data_format() == 'channels_first':trainX = trainX.reshape(trainX.shape[0], 1, img_rows, img_cols)testX = testX.reshape(testX.shape[0], 1, img_rows, img_cols)input_shape = (1, img_rows, img_cols)
else:trainX = trainX.reshape(trainX.shape[0], img_rows, img_cols, 1)testX = testX.reshape(testX.shape[0], img_rows, img_cols, 1)input_shape = (img_rows, img_cols, 1)trainX = trainX.astype('float32')
testX = testX.astype('float32')
trainX /= 255.0
testX /= 255.0# 将标准答案转化为需要的格式(one-hot编码)。
trainY = tensorflow.keras.utils.to_categorical(trainY, num_classes)
testY = tensorflow.keras.utils.to_categorical(testY, num_classes)
# 2. 通过Keras的API定义卷积神经网络
# 使用Keras API定义模型。
model = Sequential()
model.add(Conv2D(32, kernel_size=(5, 5), activation='relu', input_shape=input_shape))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Conv2D(64, (5, 5), activation='relu'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Flatten())
model.add(Dense(500, activation='relu'))
model.add(Dense(num_classes, activation='softmax'))# 定义损失函数、优化函数和评测方法。
model.compile(loss=tensorflow.keras.losses.categorical_crossentropy,optimizer=tensorflow.keras.optimizers.SGD(),metrics=['accuracy'])# 3. 通过Keras的API训练模型并计算在测试数据上的准确率
model.fit(trainX, trainY,batch_size=128,epochs=10,validation_data=(testX, testY))# 在测试数据上计算准确率。
score = model.evaluate(testX, testY)
print('Test loss:', score[0])
print('Test accuracy:', score[1])执行LeNet模型的训练代码:

该Python脚本会下载MNIST数据集,然后开始加载训练参数:
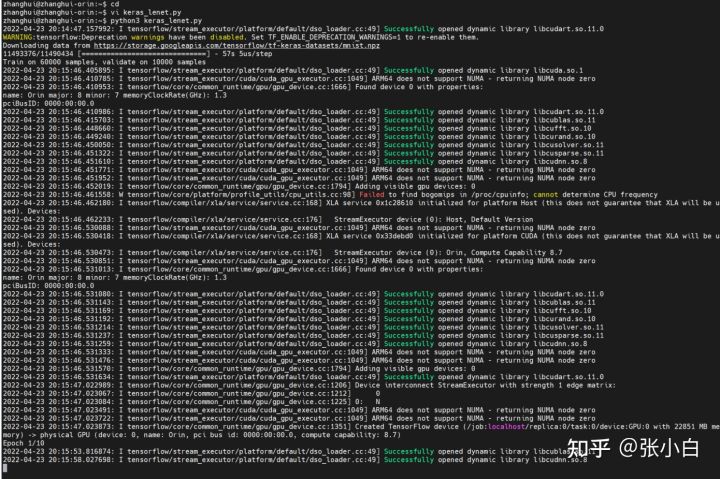
然后进行训练:
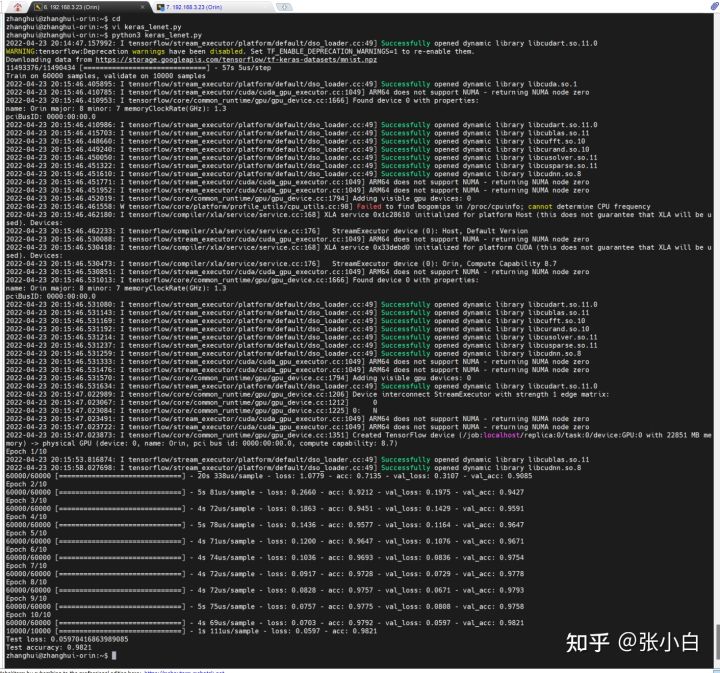
经过了几轮训练,准确率提高到了0.9821,loss降低到了0.0597左右。可见,Jetson AGX Orin在LeNet网络的运行结果,跟Jetson Nano是几乎一样的。当然,我们现在不涉及测试性能。
以上就是张小白初体验Jetson AGX Orin设备的过程,还有更多的内容需要张小白一一去挖掘呢!
(全文完,谢谢阅读)