本文是博主对《Reinforcement Learning- An introduction》的阅读笔记,不涉及内容的翻译,主要为个人的理解和思考。
上一节介绍了TD算法,其采用了Bootstrapping方法,当前过去的预估以及即期收益来更新累积收益函数:
前文我们提到,通过Bootstrapping TD算法,相比于蒙特卡罗法,可以加快学习速度,但另一方面在更新累积收益函数时会存在可能偏差。而n-step TD算法就是两种算法的中间结合,其在经过n步的蒙特卡罗法采样后,再通过Bootstrapping来预估后续收益,其累积收益函数的更新可以表示为:
在一些情况中,在单步中很难获得有意义的即时reward,另一方面又想要加快学习速度,n-step TD算法就非常适合,其可以在真实采样n步后,当到达一个有意义的状态后,再通过Bootstrapping来加快训练。n-step TD算法实际上是TD算法结合MC的一个变种。其价值函数的更新也可以改写为:
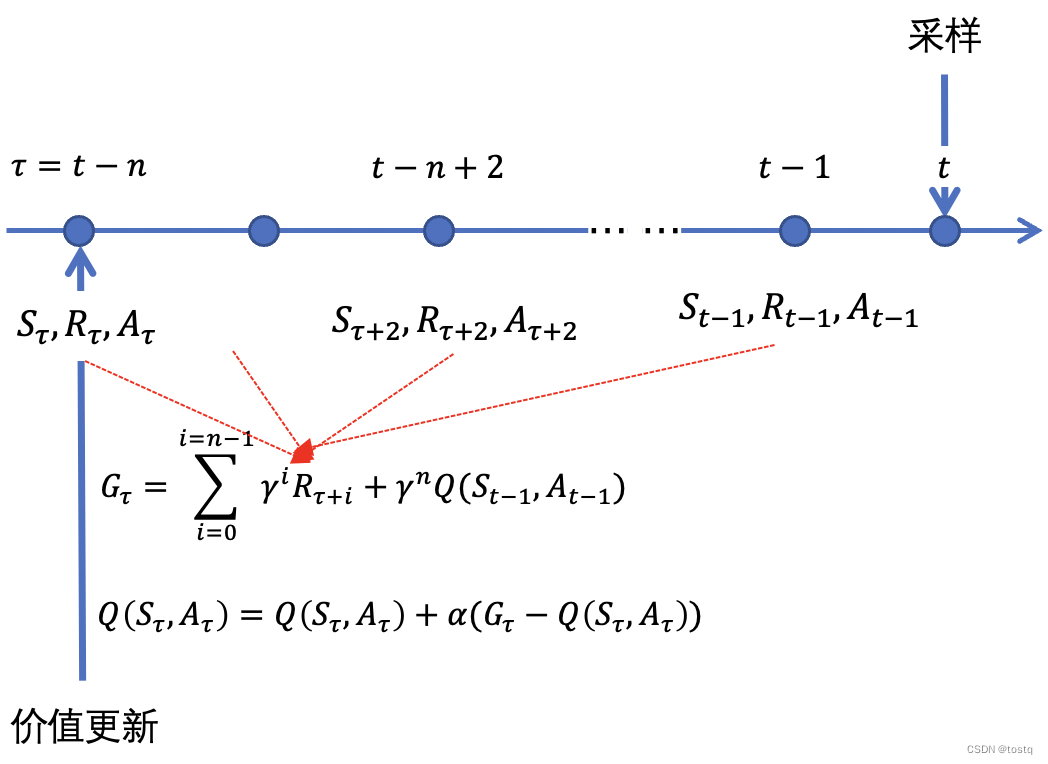
下图描述了n-step TD算法整体采样以及更新步骤,图中描述了在t时刻完成动作采样,转换下一状态后,更新t-n时刻的价值函数的过程。
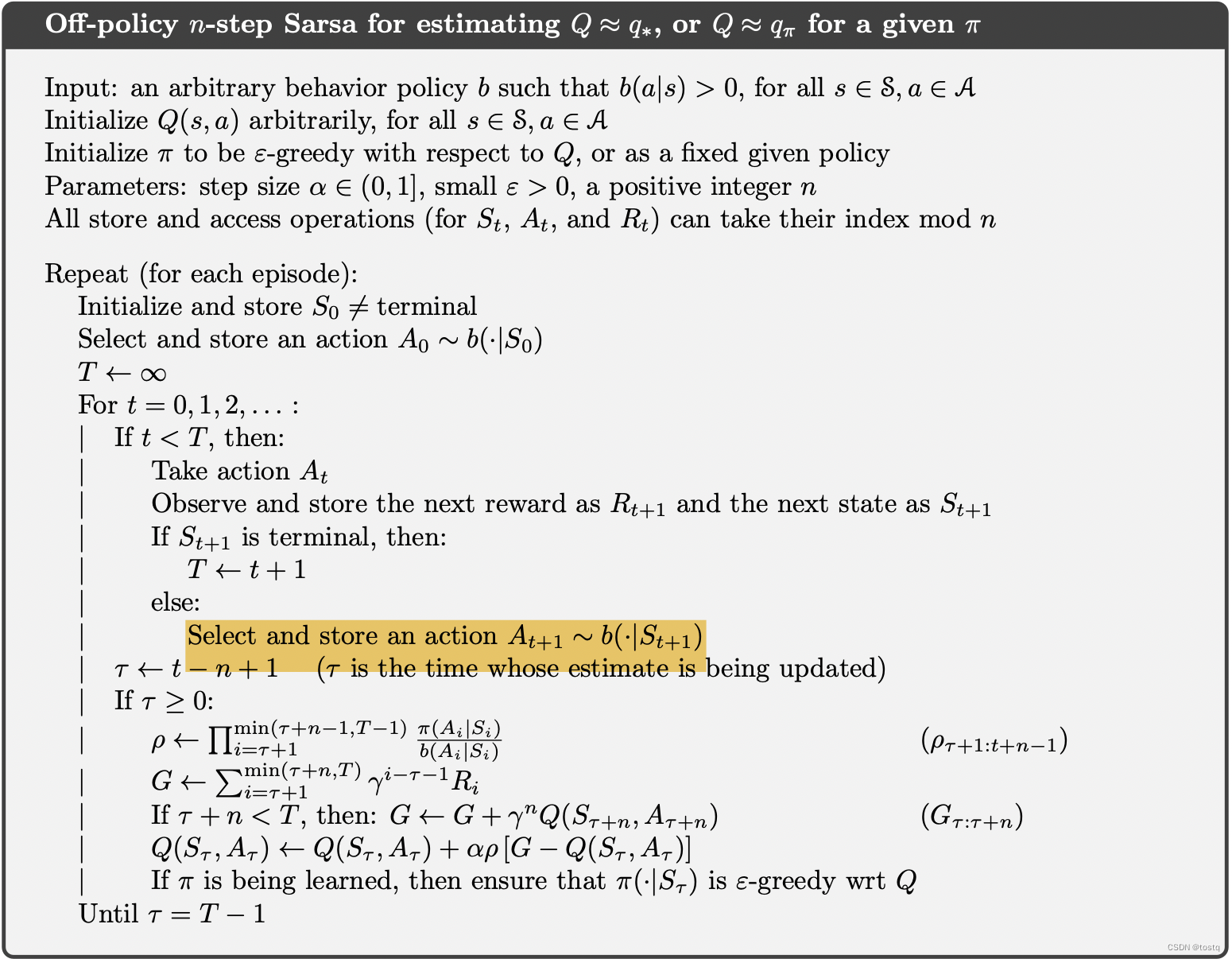
1. on-policy or offline-policy
on-policy和off-policy算法的不同主要不同在于采样动作时,是依赖于target-policy还是behavior-policy。简单来说,对于on-policy算法,采样是通过目标policy函数来选择的,而目标policy函数是在完成价值函数更新后进行修正的。
而off-policy定义了另一个behavior-policy来完成采样,其同价值函数更新后所修正的目标policy函数不同,其主要是为了explore。因此behavior-policy和target-policy之前的不同,会导致累积收益函数之前存在偏差,其需要通过重要性采样方式来修正。
2. n-step Tree Backup Algorithm
上节提到在off-policy策略,其引入了behavior-policy来完成样本采样,然后通过重要性采样来调整target-policy之间的偏差,本节所介绍Tree Backup方法,不是通过重要性采样来扭偏,而是直接通过target-policy来调整,下图介绍整体逻辑,其类似于上一篇所说的Expected on-policy方法。

上述的公式在求解时,需要用到
,以及其他子路径的估计值
,这种树形回溯计算的方式因此称之为Tree Backup算法。
3. 统一的算法
on-policy算法直接通过target-policy进行采样,而off-policy算法或者通过采用behavior-policy+重新性采样,或者类似于Tree Backup引入了期望估计的方法。on-policy方法收敛速度更快,但off-policy更可能找到最优点,因此一种统一算法是设定某个概率值来随机选择每步是用on-policy直接采样计算,还是通过off-policy算法进行更新,这种方式能综合两种策略的优点,称之为n-step Q(
)算法。