python_0">比较(二)利用python绘制雷达图
雷达图(Radar Chart)简介
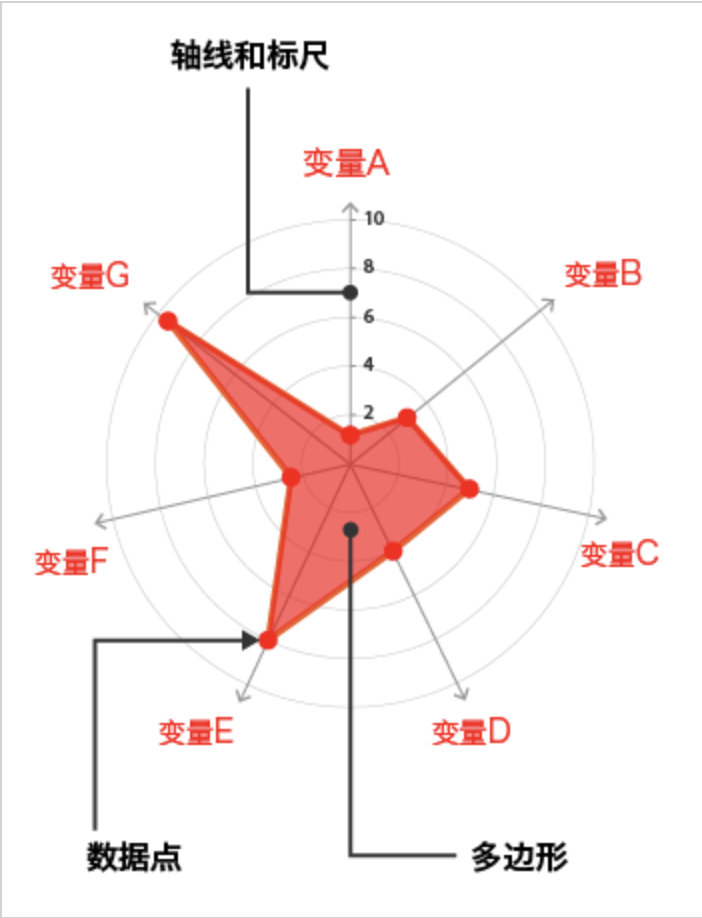
雷达图可以用来比较多个定量变量,也可以用于查看数据集中变量的得分高低,是显示性能表现的理想之选。缺点是变量过多容易造成阅读困难。
快速绘制
-
基于matplotlib
python">import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 计算变量个数 categories=list(df)[1:] N = len(categories)# 仅绘制第一行数据的雷达图 values = df.loc[0].drop('group').values.flatten().tolist() # 获取第一行数据,剔除group values += values[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 计算每个轴的角度 angles = [n / float(N) * 2 * pi for n in range(N)] # 每个变量的角度位置 angles += angles[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 初始化布局 ax = plt.subplot(111, polar=True)# 将每个变量绘制在极坐标上 plt.xticks(angles[:-1], categories, color='grey', size=8)# y标签 ax.set_rlabel_position(0) plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7) plt.ylim(0,40)# 绘制数据 ax.plot(angles, values, linewidth=1, linestyle='solid')# 填充区域颜色 ax.fill(angles, values, 'b', alpha=0.1)plt.show()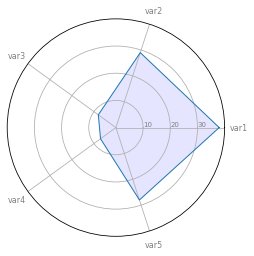
定制多样化的雷达图
自定义雷达图一般是结合使用场景对相关参数进行修改,并辅以其他的绘图知识。参数信息可以通过官网进行查看,其他的绘图知识则更多来源于实战经验,大家不妨将接下来的绘图作为一种学习经验,以便于日后总结。
-
一图绘制多个雷达图
python">import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 计算变量个数 categories=list(df)[1:] N = len(categories)# 仅绘制第一行数据的雷达图 values = df.loc[0].drop('group').values.flatten().tolist() # 获取第一行数据,剔除group values += values[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 计算每个轴的角度 angles = [n / float(N) * 2 * pi for n in range(N)] # 每个变量的角度位置 angles += angles[:1] # 闭合圆形图,需要在末尾增加一个与起始相同的值# 初始化布局 ax = plt.subplot(111, polar=True)# 偏移-将第一个轴位于顶部 ax.set_theta_offset(pi / 2) ax.set_theta_direction(-1)# 将每个变量绘制在极坐标上 plt.xticks(angles[:-1], categories)# y标签 ax.set_rlabel_position(0) plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7) plt.ylim(0,40)# 添加多个极坐标图 # 绘制第一个图 values = df.loc[0].drop('group').values.flatten().tolist() values += values[:1] ax.plot(angles, values, linewidth=1, linestyle='solid', label="group A") ax.fill(angles, values, 'b', alpha=0.1)# 绘制第二个图 values = df.loc[1].drop('group').values.flatten().tolist() values += values[:1] ax.plot(angles, values, linewidth=1, linestyle='solid', label="group B") ax.fill(angles, values, 'r', alpha=0.1)# 图例 plt.legend(loc='upper right', bbox_to_anchor=(0.1, 0.1))plt.show()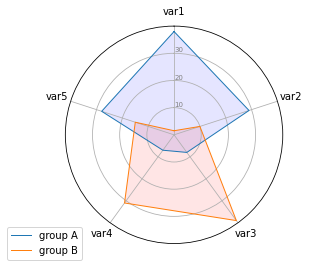
-
分组雷达图
python">import matplotlib.pyplot as plt import pandas as pd from math import pi# 自定义数据 df = pd.DataFrame({ 'group': ['A','B','C','D'], 'var1': [38, 1.5, 30, 4], 'var2': [29, 10, 9, 34], 'var3': [8, 39, 23, 24], 'var4': [7, 31, 33, 14], 'var5': [28, 15, 32, 14] })# 自定义函数-每一行绘制一个雷达图 def make_spider( row, title, color):# 计算变量个数categories=list(df)[1:]N = len(categories)# 计算角度angles = [n / float(N) * 2 * pi for n in range(N)]angles += angles[:1]# 初始化布局ax = plt.subplot(2,2,row+1, polar=True, )# 偏移至顶部ax.set_theta_offset(pi / 2)ax.set_theta_direction(-1)# x标签plt.xticks(angles[:-1], categories, color='grey', size=8)# y标签ax.set_rlabel_position(0)plt.yticks([10,20,30], ["10","20","30"], color="grey", size=7)plt.ylim(0,40)# 极坐标图values = df.loc[row].drop('group').values.flatten().tolist()values += values[:1]ax.plot(angles, values, color=color, linewidth=2, linestyle='solid')ax.fill(angles, values, color=color, alpha=0.4)# 标题plt.title(title, size=11, color=color, y=1.1)# 图标参数 my_dpi=96 plt.figure(figsize=(1000/my_dpi, 1000/my_dpi), dpi=my_dpi)# 调色板 my_palette = plt.cm.get_cmap("Set2", len(df.index))# 绘制多个图 for row in range(0, len(df.index)):make_spider( row=row, title='group '+df['group'][row], color=my_palette(row))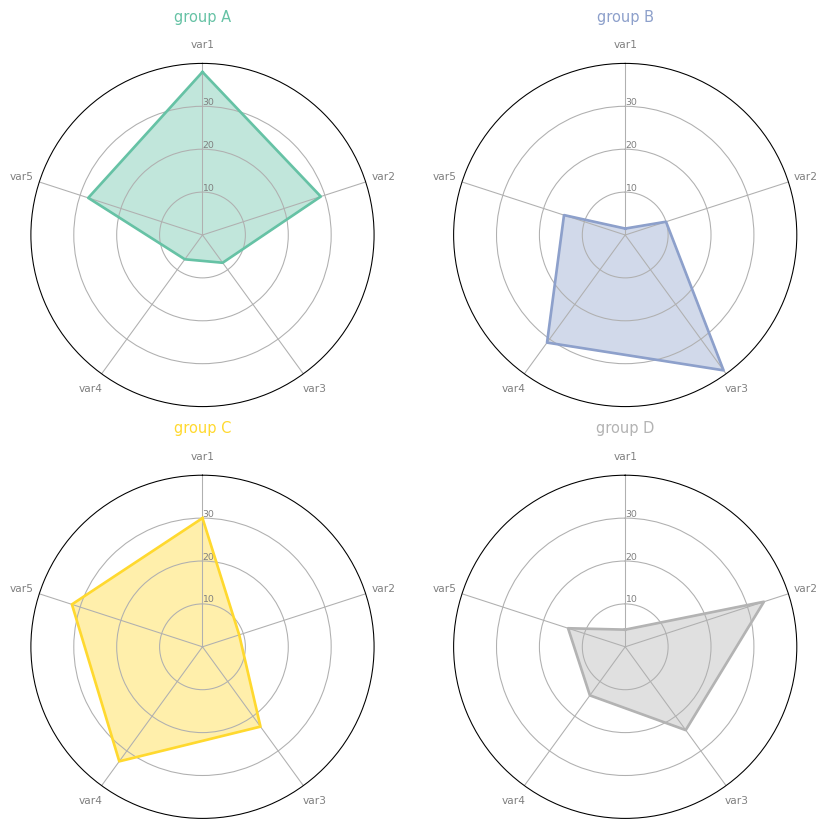
总结
以上通过matplotlib结合极坐标绘制雷达图,并通过其他绘图知识自定义各种各样的雷达图来适应相关使用场景。
共勉~




![[个人总结]-java常用方法](https://img-blog.csdnimg.cn/direct/b9e7d0ce739547cda06c1096f0495f8e.png)