【车载开发系列】UDS诊断时间参数说明
一. 应用层诊断时间参数
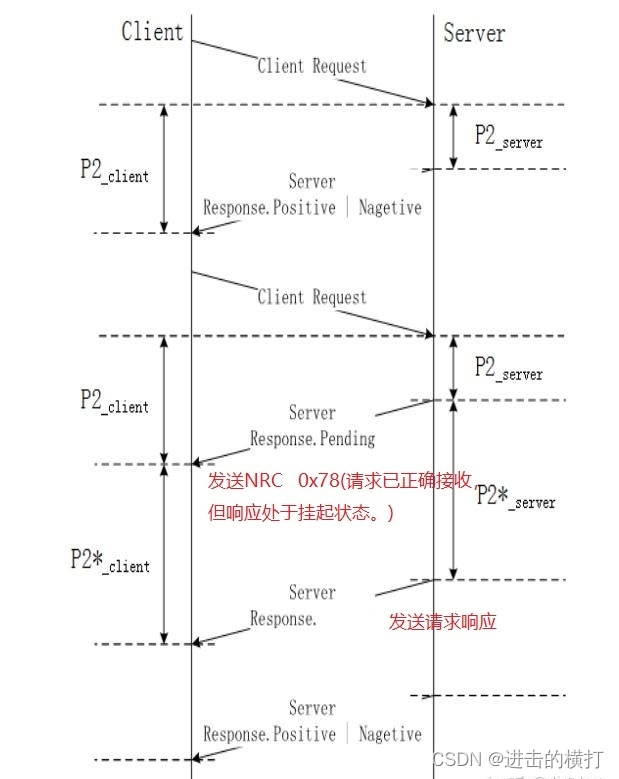
1)P2 CAN_Client
诊断仪成功发送诊断报文请求之后到收到 ECU回复诊断响应的超时时间间隔
2)P2 CAN_Server
ECU 接收到诊断请求之后到开始发送诊断报文的时间间隔,一般默认最大值设定为50ms。
3)P2* CAN_Client
诊断工具接收到NRC0x78之后继续等待 ECU 响应的时间间隔
4)P2* CAN_Server
ECU 发送 NRC 0x78之后继续发送下帧诊断响应报文的时间间隔,一般最大值设定在5000ms。
5)P3 CAN Client Phys
诊断工具成功发送物理寻址诊断请求之后,且无需ECU回复继续发送下次物理寻址诊断请求的最小时间间隔
6)P3 CAN Client Func
诊断工具成功发送功能寻址之后再次发送功能寻址的最小时间间隔
二. 会话层诊断时间参数
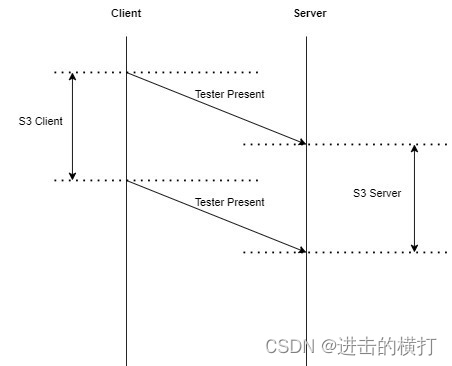
1)S3 Client
诊断工具为了保持非默认会话模式而发送 $3E服务请求报文的时间间隔
Tester的定时参数,客户端为将ECU保持在非默认会话状态,两个连续的0x3E TesterPresent请求报文的间隔时间。通常取4000ms。
2)S3 Server
没有接到任何诊断报文(不一定是 $3E 报文,可以是其他服务请求报文) 时ECU保持在非默认会话模式的时间,一般设定值是5000ms。
在S3Server 时间内,如果ECU没有接收到任何诊断请求报文,则退出非默认会话模式,返回默认会话模式。
3)P4Server
P4Server这个时间参数其实不只是UDSonIP用到,UDSonCAN也可能用到,但用的比较少。它的含义是ECU接收到诊断请求后到最终的诊断肯定响应或否定响应(不包含NRC 0x78)的时间间隔,它是对ECU性能的要求,目的是防止ECU长时间返回NRC0x78的否定响应。
当P4Server_max=P2Server_max时,就意味着不允许ECU返回NRC0x78的否定响应。
ISO 14229-2 标准中还规定,连续返回NRC 0x78时,时间间隔不能小于0.3 * P2*Server_max,以避免网络中存在过多不必要的否定响应。
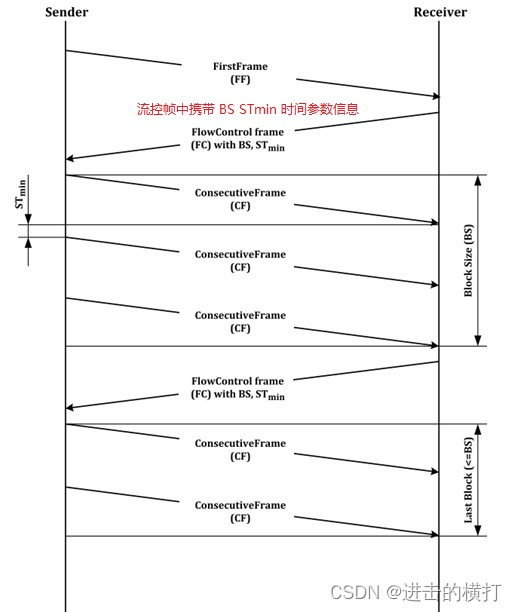
三. UDS传输层流控制时间参数
Block Size 简称“BS”,该参数与STmin一般同时出现。此两参数主要用于诊断报文传输多帧时会使用到。
1)STmin
接收方发送流控帧之后,发送方发送的连续帧之间的时间最小间隔。如果值为0,表示对于发送方发送CF的最小时间没有要求。
2)Block Size
接收方表示发送流控帧之后,发送方被允许连续发送的最大帧数目。特殊情况下,如果该值为0,则表示发送连续帧没有限制,如果值为8,表示发送方最多能连续发送8帧CF就会继续收到接收方的流控帧;
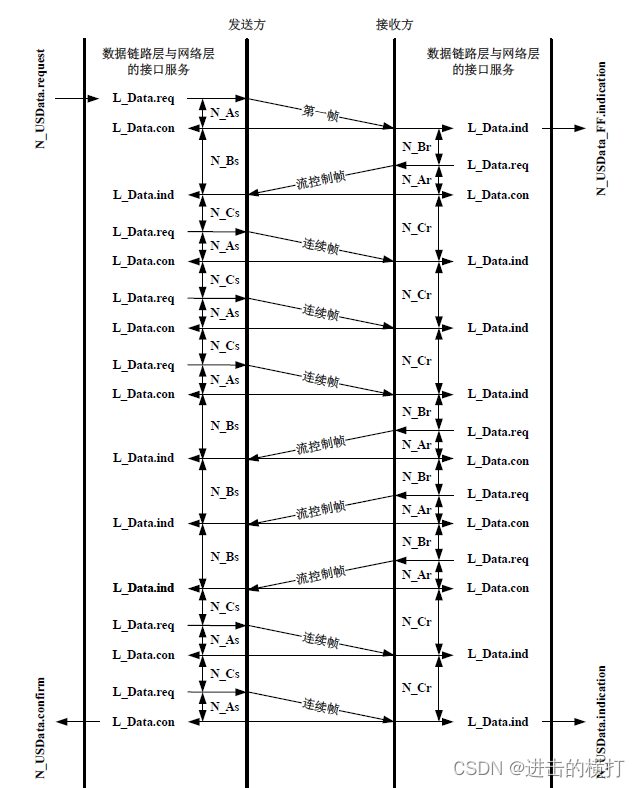
四. 网络层时间参数
1)N_As
发送方任意帧类型从请求发送到发送完成 (接收到对应的ACK) 的时间间隔。一般Timeout时间设定在25ms。
2)N_Ar
接收方任意帧类型从请求发送到发送完成的时间间隔。一般Timeout时间设定在25ms。
3)N_Bs
N_Bs可理解为Sender从XXX到收到流控帧 的时间,XXX分为三种情况:
1、Sender从发送完首帧(FF)到收到流控帧的时间;
2、Sender从发送完连续帧(CF)到收到流控帧 的时间;
3、Sender从收到流控帧(FC)(状态为Wait)到收到下一个流控帧的时间;
4)N_Br
N_Br可理解为Receiver从XXX到请求发送流控帧的时间,XXX分为三种情况:
1、Receiver从收到首帧(FF)到请求发送流控帧FC的时间
2、Receiver从收到连续帧(CF)到请求发送流控帧FC的时间
3、Receiver从发送完流控帧(FC)(状态为Wait) 到请求发送下一个流控帧的时间
5)N_Cs
发送方从XXX到请求发送连续帧(CF) 的时间,XXX分为两种情况
1、Sender 从 收到流控帧(FC)到 请求发送连续帧(CF) 的时间
2、Sender从 发送完连续帧(CF)到 请求发送下一包连续帧(CF) 的时间
6)N_Cr
接收方从XXX到收到下一个连续帧(CF) 的时间,XXX分为两种情况
1、Receiver 从发送完流控帧(FC)到收到连续帧(CF)的时间
2、Receiver 从 收到连续帧(CF)到 收到下一包连续帧(CF) 的时间