前言
上一篇我们体验了一下静态广播的例子流程,通过命令行方式传入所需的6D参数(死数据称之为静态)并广播给tf2系统,实际使用中,这些参数可是实打实实时生成的,所以需要动态处理这些实时数据,本篇即由此始,写一个实打实的(动态)广播节点。
动动手
我们还是接着使用上篇创建的learning_tf2_cpp功能包。
编写广播节点
进入该功能包的src路径,执行以下命令下载官方提供的turtle_tf2_broadcaster.cpp源代码:
$wget https://raw.githubusercontent.com/ros/geometry_tutorials/ros2/turtle_tf2_cpp/src/turtle_tf2_broadcaster.cpp源文件内容如下:
#include <functional>
#include <memory>
#include <sstream>
#include <string>#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
#include "tf2/LinearMath/Quaternion.h"
#include "tf2_ros/transform_broadcaster.h"
#include "turtlesim/msg/pose.hpp"class FramePublisher : public rclcpp::Node
{
public:FramePublisher(): Node("turtle_tf2_frame_publisher"){// Declare and acquire `turtlename` parameterturtlename_ = this->declare_parameter<std::string>("turtlename", "turtle");// Initialize the transform broadcastertf_broadcaster_ =std::make_unique<tf2_ros::TransformBroadcaster>(*this);// Subscribe to a turtle{1}{2}/pose topic and call handle_turtle_pose// callback function on each messagestd::ostringstream stream;stream << "/" << turtlename_.c_str() << "/pose";std::string topic_name = stream.str();subscription_ = this->create_subscription<turtlesim::msg::Pose>(topic_name, 10,std::bind(&FramePublisher::handle_turtle_pose, this, std::placeholders::_1));}private:void handle_turtle_pose(const std::shared_ptr<turtlesim::msg::Pose> msg){geometry_msgs::msg::TransformStamped t;// Read message content and assign it to// corresponding tf variablest.header.stamp = this->get_clock()->now();t.header.frame_id = "world";t.child_frame_id = turtlename_.c_str();// Turtle only exists in 2D, thus we get x and y translation// coordinates from the message and set the z coordinate to 0t.transform.translation.x = msg->x;t.transform.translation.y = msg->y;t.transform.translation.z = 0.0;// For the same reason, turtle can only rotate around one axis// and this why we set rotation in x and y to 0 and obtain// rotation in z axis from the messagetf2::Quaternion q;q.setRPY(0, 0, msg->theta);t.transform.rotation.x = q.x();t.transform.rotation.y = q.y();t.transform.rotation.z = q.z();t.transform.rotation.w = q.w();// Send the transformationtf_broadcaster_->sendTransform(t);}rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr subscription_;std::unique_ptr<tf2_ros::TransformBroadcaster> tf_broadcaster_;std::string turtlename_;
};int main(int argc, char * argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<FramePublisher>());rclcpp::shutdown();return 0;
}代码分析
turtlename_ = this->declare_parameter<std::string>("turtlename", "turtle");在此广播(发布者)节点的构造函数中,我们定义并获取了带一个参数的turtlename参数,可以赋值turtle1或turtle2或者其他你想取的任何名字。
subscription_ = this->create_subscription<turtlesim::msg::Pose>(topic_name, 10,std::bind(&FramePublisher::handle_turtle_pose, this, _1));接着,我们订阅了海龟仿真的位姿主题turtleX/pose(消息类型msg/Pose),并绑定了处理该主题消息的回调函数(一旦接收到该主题的数据,该回调函数会自动对数据进行转换处理并将最终结果广播给tf2系统)。
geometry_msgs::msg::TransformStamped t;// Read message content and assign it to
// corresponding tf variables
t.header.stamp = this->get_clock()->now();
t.header.frame_id = "world";
t.child_frame_id = turtlename_.c_str();在回调函数中,我们填充初始化一些结构体成员变量,当前时间(从1970年1月1日00:00到当前时间的总秒数)赋给stamp作为该节点发布消息时的一个时间戳标签,父坐标系名为world,子坐标系由传入的参数决定(名字可随意取,此处为方便明了就用了小海龟的名字作为子坐标系名称)。
// Turtle only exists in 2D, thus we get x and y translation
// coordinates from the message and set the z coordinate to 0
t.transform.translation.x = msg->x;
t.transform.translation.y = msg->y;
t.transform.translation.z = 0.0;// For the same reason, turtle can only rotate around one axis
// and this why we set rotation in x and y to 0 and obtain
// rotation in z axis from the message
tf2::Quaternion q;
q.setRPY(0, 0, msg->theta);
t.transform.rotation.x = q.x();
t.transform.rotation.y = q.y();
t.transform.rotation.z = q.z();
t.transform.rotation.w = q.w();由于小海龟仿真的例子是运行在2D世界(平面)中,平移运动中Z轴用不上,所以上面代码平移转换变量中z值都取为0,而旋转转换变量只有Z轴是可用的(平面上转圈,Z轴垂直于平面)。
// Send the transformation
tf_broadcaster_->sendTransform(t);最后,将转换(从world坐标系到turtleX坐标系的转换)结果广播发布给tf2系统中。
CMakeLists.txt
进入到learning_tf2_cpp功能包的根路径,打开CMakeLists.txt,将下面内容复制到里面(节点可执行文件的最终名字为turtle_tf2_broadcaster):
add_executable(turtle_tf2_broadcaster src/turtle_tf2_broadcaster.cpp)
ament_target_dependencies(turtle_tf2_broadcastergeometry_msgsrclcpptf2tf2_rosturtlesim
)添加安装路径:
install(TARGETSturtle_tf2_broadcasterDESTINATION lib/${PROJECT_NAME})编写启动(launch)文件
我们利用launch文件启动节点,在包的launch文件夹下新建名为turtle_tf2_demo:
from launch import LaunchDescription
from launch_ros.actions import Nodedef generate_launch_description():return LaunchDescription([Node(package='turtlesim',executable='turtlesim_node',name='sim'),Node(package='learning_tf2_cpp',executable='turtle_tf2_broadcaster',name='broadcaster1',parameters=[{'turtlename': 'turtle1'}]),])代码分析
from launch import LaunchDescription
from launch_ros.actions import Node首先导入需要的模块,launch在ROS和ROS 2中都是通用的,而launch_ros却只能在ROS 2中使用。
Node(package='turtlesim',executable='turtlesim_node',name='sim'
),
Node(package='learning_tf2_cpp',executable='turtle_tf2_broadcaster',name='broadcaster1',parameters=[{'turtlename': 'turtle1'}]
),启动两个节点,一个是turtlesim/turtlesim_node,一个是learning_tf2_cpp/turtle_tf2_broadcaster,参数turtlename赋值为turtle1,广播turtle1的状态数据给tf2系统。
添加依赖项
将下面关于launch和launch_ros的执行依赖项添加到package.xml:
<exec_depend>launch</exec_depend>
<exec_depend>launch_ros</exec_depend>CMakeLists.txt
添加下面内容以使launch/文件夹下的launch文件能够被正确安装到指定路径下:
install(DIRECTORY launchDESTINATION share/${PROJECT_NAME})构建
切换到工作空间根路径下,分别执行以下流程(检查依赖、单独构建、激活环境):
$rosdep install -i --from-path src --rosdistro iron -y$colcon build --packages-select learning_tf2_cpp$source install/setup.bash或者
$. install/setup.bash运行
先运行启动文件,这样小海龟turtlesim_node节点和广播节点turtle_tf2_broadcaster就都跑起来了:
$ros2 launch learning_tf2_cpp turtle_tf2_demo_launch.py
但此时小海龟还是处于静止状态,不会产生位姿数据,我们需要再打开一个终端启动控制节点teleop_key,让小海龟游动起来(键盘控制):
$ros2 run turtlesim turtle_teleop_key等这些节点都弄完后,我们需要利用tf2_echo工具检查一下广播节点发布的数据情况,命令为(world turtle1表示从world坐标系到turtle1坐标系的转换数据):
$ros2 run tf2_ros tf2_echo world turtle1再回到控制终端,随便控制下小海龟,此时切换到tf2_echo终端,可以看到这些转换的发布数据。
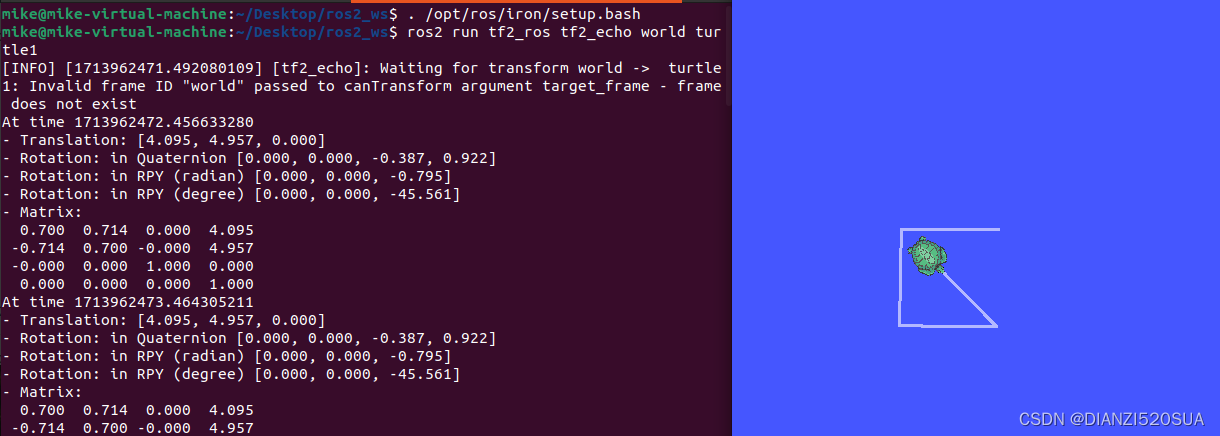
(只不过有警告,可能与/world坐标系的初始位置标定有关,待后续解决后将解决方法发布出来,或者有了解的同学欢迎评论区告知一二)
如果我们执行ros2 run tf2_ros tf2_echo world turtle2,我们不会看到任何数据,因为turtle2不存在,在后面的博文中我们将添加第二只小海龟turtle2,那时就能看到turtle2的位姿数据广播到tf2系统中去了。
本篇完。