参考正点原子I.MX6U嵌入式Linux驱动开发指南
一、简介
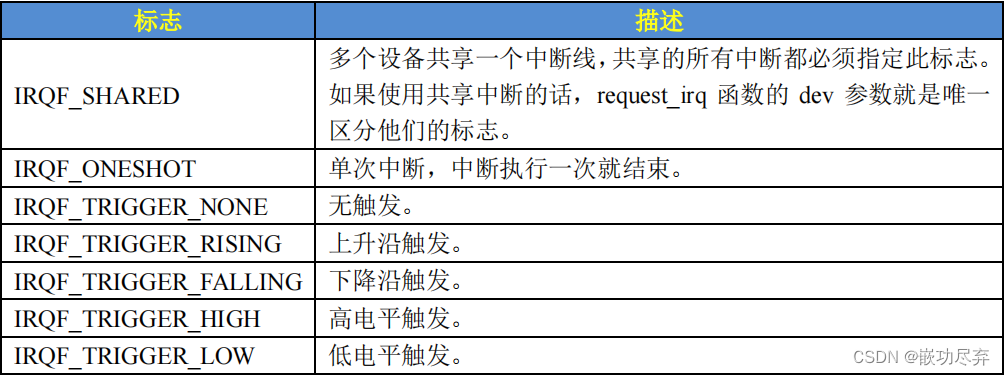
int request_irq(unsigned int irq,irq_handler_t handler,unsigned long flags,const char *name,void *dev)
void free_irq(unsigned int irq, void *dev)
irqreturn_t (*irq_handler_t) (int, void *)
enum irqreturn {IRQ_NONE = (0 << 0),IRQ_HANDLED = (1 << 0),IRQ_WAKE_THREAD = (1 << 1),
};typedef enum irqreturn irqreturn_t;return IRQ_RETVAL(IRQ_HANDLED)
void enable_irq(unsigned int irq)void disable_irq(unsigned int irq)
void disable_irq_nosync(unsigned int irq)
local_irq_enable()local_irq_disable()
local_irq_save(flags)local_irq_restore(flags)
二、上半部与下半部
struct softirq_action
{void (*action)(struct softirq_action *);
};static struct softirq_action softirq_vec[NR_SOFTIRQS];
enum
{HI_SOFTIRQ=0, /* 高优先级软中断 */TIMER_SOFTIRQ, /* 定时器软中断 */NET_TX_SOFTIRQ, /* 网络数据发送软中断 */NET_RX_SOFTIRQ, /* 网络数据接收软中断 */BLOCK_SOFTIRQ, BLOCK_IOPOLL_SOFTIRQ, TASKLET_SOFTIRQ, /* tasklet 软中断 */SCHED_SOFTIRQ, /* 调度软中断 */HRTIMER_SOFTIRQ, /* 高精度定时器软中断 */RCU_SOFTIRQ, /* RCU 软中断 */NR_SOFTIRQS
};void open_softirq(int nr, void (*action)(struct softirq_action *))
void raise_softirq(unsigned int nr)
void __init softirq_init(void)
{int cpu;for_each_possible_cpu(cpu){per_cpu(tasklet_vec, cpu).tail =&per_cpu(tasklet_vec, cpu).head;per_cpu(tasklet_hi_vec, cpu).tail =&per_cpu(tasklet_hi_vec, cpu).head;}open_softirq(TASKLET_SOFTIRQ, tasklet_action);open_softirq(HI_SOFTIRQ, tasklet_hi_action);
}struct tasklet_struct
{struct tasklet_struct *next; /* 下一个 tasklet */unsigned long state; /* tasklet 状态 */atomic_t count; /* 计数器,记录对 tasklet 的引用数 */void (*func)(unsigned long); /* tasklet 执行的函数 */unsigned long data; /* 函数 func 的参数 */
};void tasklet_init(struct tasklet_struct *t,void (*func)(unsigned long),unsigned long data);
DECLARE_TASKLET(name, func, data)
void tasklet_schedule(struct tasklet_struct *t)
三、设备树中断节点
intc: interrupt-controller@00a01000 {
compatible = "arm,cortex-a7-gic";
#interrupt-cells = <3>;
interrupt-controller;
reg = <0x00a01000 0x1000>,
<0x00a02000 0x100>;
};
gpio5 : gpio @020ac000{
compatible = "fsl,imx6ul-gpio", "fsl,imx35-gpio";
reg = <0x020ac000 0x4000>;
interrupts = <GIC_SPI 74 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 75 IRQ_TYPE_LEVEL_HIGH>;
gpio - controller;
#gpio - cells = < 2>;
interrupt - controller;
#interrupt - cells = < 2>;
};

1 fxls8471@1e {
2 compatible = "fsl,fxls8471";
3 reg = <0x1e>;
4 position = <0>;
5 interrupt-parent = <&gpio5>;
6 interrupts = <0 8>;
7 };
unsigned int irq_of_parse_and_map(struct device_node *dev, int index)
int gpio_to_irq(unsigned int gpio)
四、示例实验
4.1 设备树
key {
#address-cells = <1>;
#size-cells = <1>;
compatible = "lyh-key";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_key>;
led-gpio = <&gpio1 18 GPIO_ACTIVE_LOW>;
interrupt-parent = <&gpio1>;
interrupts = <18 IRQ_TYPE_EDGE_BOTH>; /* FALLING RISING */
status = "okay";
};…………
pinctrl_key: keygrp {
fsl,pins = <
MX6UL_PAD_UART1_CTS_B__GPIO1_IO18 0xF080 /* KEY */
>;
};
4.2 中断驱动
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/of_irq.h>
#include <linux/irq.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>/***************************************************************
Copyright © ALIENTEK Co., Ltd. 1998-2029. All rights reserved.
文件名 : keyirq.c
作者 : lyh
版本 : V1.0
描述 : LED驱动文件。
其他 : 无
日志 : 初版V1.0 2024/4/14 lyh创建
***************************************************************/
#define KEY_CNT 1 /* 设备号个数 */
#define KEY_NAME "key" /* 名字 */
#define KEY0VALUE 0X01 /* KEY0 按键值 */
#define INVAKEY 0XFF /* 无效的按键值 */
#define KEY_NUM 1 /* 按键数量 *//* 中断 IO 描述结构体 */
struct irq_keydesc {int gpio; /* gpio */int irqnum; /* 中断号 */unsigned char value; /* 按键对应的键值 */char name[10]; /* 名字 */irqreturn_t (*handler)(int, void *); /* 中断服务函数 */
};/* key设备结构体 */
struct key_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */struct timer_list timer;atomic_t key_value;atomic_t releasekey;struct irq_keydesc irqkeydesc[KEY_NUM]; /* 按键描述数组 */unsigned char curkeynum; /* 当前的按键号 */
};struct key_dev key; /* key设备 *//* @description : 中断服务函数,开启定时器,延时 10ms,* 定时器用于按键消抖。* @param - irq : 中断号* @param - dev_id : 设备结构。* @return : 中断执行结果*/
static irqreturn_t key0_handler(int irq, void *dev_id)
{struct key_dev *dev = (struct key_dev *)dev_id;dev->curkeynum = 0;dev->timer.data = (unsigned long)dev;mod_timer(&dev->timer, jiffies + msecs_to_jiffies(10));return IRQ_RETVAL(IRQ_HANDLED);
}void timer_func(unsigned long arg)
{struct key_dev *dev = (struct key_dev *)arg;unsigned char value;int num = dev->curkeynum;struct irq_keydesc *keydesc = &dev->irqkeydesc[num];value = gpio_get_value(keydesc->gpio);if(value == 0){ //按下按键atomic_set(&dev->key_value, keydesc->value);} else { //松开按键atomic_set(&dev->key_value, 0x80 | keydesc->value);atomic_set(&dev->releasekey, 1);}return;
}/** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int key_open(struct inode *inode, struct file *filp)
{filp->private_data = &key; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t key_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{int ret = 0;unsigned char keyvalue = 0;unsigned char releasekey = 0;struct key_dev *dev = (struct key_dev *)filp->private_data;keyvalue = atomic_read(&dev->key_value);releasekey = atomic_read(&dev->releasekey);if (releasekey){ /* 有按键按下 */if (keyvalue & 0x80){keyvalue &= ~0x80;ret = copy_to_user(buf, &keyvalue, sizeof(keyvalue));}else{goto data_error;}atomic_set(&dev->releasekey, 0); /* 按下标志清零 */}else{goto data_error;}return 0;data_error:return -EINVAL;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t key_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int key_release(struct inode *inode, struct file *filp)
{return 0;
}/* 设备操作函数 */
static struct file_operations key_fops = {.owner = THIS_MODULE,.open = key_open,.read = key_read,.write = key_write,.release = key_release,
};static int keyio_init(void)
{int ret;int i;/* 找到设备节点 */key.nd = of_find_node_by_path("/key");if(key.nd == NULL) {printk("key node cant not found!\r\n");return -EINVAL;} else {printk("key node has been found!\r\n");}/* 获取设备树中的 gpio 编号 */for(i = 0; i < KEY_NUM; i++){key.irqkeydesc[i].gpio = of_get_named_gpio(key.nd, "key-gpio", i);if(key.irqkeydesc[i].gpio < 0){printk("can't get key-gpio %d", i);return -EINVAL;}}/* gpio 初始化,申请中断号 */for(i = 0; i < KEY_NUM; i++){memset(key.irqkeydesc[i].name, 0, sizeof(key.irqkeydesc[i].name));sprintf(key.irqkeydesc[i].name, "key%d", i);gpio_request(key.irqkeydesc[i].gpio, key.irqkeydesc[i].name);ret = gpio_direction_input(key.irqkeydesc[i].gpio);if(ret < 0) {printk("can't set gpio %d direction!\r\n", i);return -EINVAL;}key.irqkeydesc[i].irqnum = gpio_to_irq(key.irqkeydesc[i].gpio);#if 0key.irqkeydesc[i].irqnum = irq_of_parse_and_map(key.nd, i);#endifprintk("key%d:gpio=%d, irqnum=%d\r\n", i, key.irqkeydesc[i].gpio, key.irqkeydesc[i].irqnum);}/* 申请中断 */key.irqkeydesc[0].handler = key0_handler;key.irqkeydesc[0].value = KEY0VALUE;for (i = 0; i < KEY_NUM; i++){ret = request_irq(key.irqkeydesc[i].irqnum,key.irqkeydesc[i].handler,IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING,key.irqkeydesc[i].name, &key);if (ret < 0){printk("irq %d request failed!\r\n", key.irqkeydesc[i].irqnum);return -EFAULT;}}/* 创建定时器 */init_timer(&key.timer);key.timer.function = timer_func;return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init keyirq_init(void)
{/* 注册字符设备驱动 *//* 1、创建设备号 */if (key.major) { /* 定义了设备号 */key.devid = MKDEV(key.major, 0);register_chrdev_region(key.devid, KEY_CNT, KEY_NAME);} else { /* 没有定义设备号 */alloc_chrdev_region(&key.devid, 0, KEY_CNT, KEY_NAME); /* 申请设备号 */key.major = MAJOR(key.devid); /* 获取分配号的主设备号 */key.minor = MINOR(key.devid); /* 获取分配号的次设备号 */}printk("key major=%d,minor=%d\r\n",key.major, key.minor); /* 2、初始化cdev */key.cdev.owner = THIS_MODULE;cdev_init(&key.cdev, &key_fops);/* 3、添加一个cdev */cdev_add(&key.cdev, key.devid, KEY_CNT);/* 4、创建类 */key.class = class_create(THIS_MODULE, KEY_NAME);if (IS_ERR(key.class)) {return PTR_ERR(key.class);}/* 5、创建设备 */key.device = device_create(key.class, NULL, key.devid, NULL, KEY_NAME);if (IS_ERR(key.device)) {return PTR_ERR(key.device);}/* 5、初始化按键 */atomic_set(&key.key_value, INVAKEY);atomic_set(&key.releasekey, 0);keyio_init();return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit keyirq_exit(void)
{unsigned int i = 0;/* 删除定时器 */del_timer_sync(&key.timer); /* 释放中断 */for (i = 0; i < KEY_NUM; i++) {free_irq(key.irqkeydesc[i].irqnum, &key);gpio_free(key.irqkeydesc[i].gpio);}/* 注销字符设备驱动 */cdev_del(&key.cdev);/* 删除cdev */unregister_chrdev_region(key.devid, KEY_CNT); /* 注销设备号 */device_destroy(key.class, key.devid);class_destroy(key.class);
}module_init(keyirq_init);
module_exit(keyirq_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("lyh");4.3 测试应用
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#include "linux/ioctl.h"int main(int argc, char *argv[])
{int fd;int ret = 0;char *filename;unsigned char data;if (argc != 2){printf("Error Usage!\r\n");return -1;}filename = argv[1];fd = open(filename, O_RDWR);if (fd < 0){printf("Can't open file %s\r\n", filename);return -1;}while (1){ret = read(fd, &data, sizeof(data));if (ret < 0){ /* 数据读取错误或者无效 */}else{ /* 数据读取正确 */if (data) /* 读取到数据 */printf("key value = %#X\r\n", data);}}close(fd);return ret;
}