51智能小车系列
智能小车(一)--------小车的前进、后退和停止
智能小车(二)-------- 小车的红外遥控调速
智能小车(三)-------- 小车的红外循迹
文章目录
- 前言
- 一、红外遥控
- 1. 简介
- 2. 红外遥控系统
- 2.1 红外发射
- 2.2 红外接收
- 3. 红外调制
- 基本发送与接收
- 二、中断系统
- 1. 外部中断0 与 定时器中断0 简介
- 2. 相关寄存器介绍
- 三、代码实现
- 1.延迟模块
- 2. 定时器模块
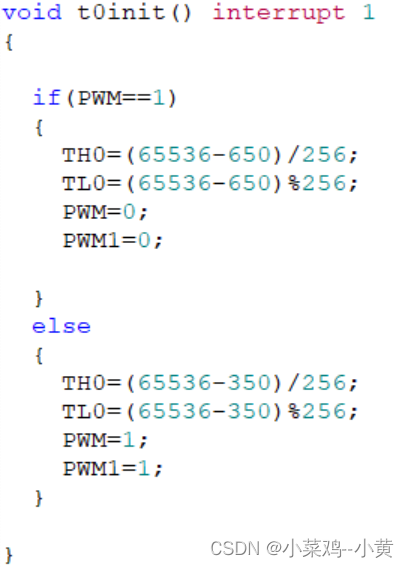
- 2.1 定时器0
- 2.2 定时器1
- 3. 数码管模块
- 4. 独立按键模块
- 5. 外部中断0模块
- 6. 红外遥控模块
- 7. 主函数模块
- 总结
前言
本节我主要介绍的是基于51单片机下智能小车的简单应用,是在上一节“智能小车(一)”的基础上增添一些功能,比如:通过调节电机转动的占空比,实现对小车简单的pwm调速;在调速的基础上,又增加红外遥控模块,实现对小车的红外遥控调速或增加红外循迹模块等,之后我都会带大家一步步走进51单片机的具体应用中来。
相关硬件模块介绍还请前往上一节内容 “ 智能小车(一) ”
一、红外遥控
1. 简介
红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点。 由于红外线为不可见光,因此对环境影响很小,再由红外光波动波长远小于无线电波的波长,所以红外线遥控不会影响其他家用电器,也不会影 响临近的无线电设备。
红外线是波长在760nm~1mm之间的非可见光。红外通信装置由红外发射管和红外接受管组成,红外发射管是能发射出红外线的发光二极管,发射强度随着电流的增大而增大;红外接受管是一个具有红外光敏感特征的PN节的光敏二极管,只对红外线有反应,产生光电流。
红外遥控是利用红外光进行通信的设备,由红外LED将调制后的信号发出,由专用的红外接收头进行解调输出。
通信方式:单工,异步;
红外LED波长:940nm;
通信协议标准:NEC标准;
遥控器:

2. 红外遥控系统
红外遥控系统一般由红外发射装置、红外接收设备两大部分组成。
2.1 红外发射
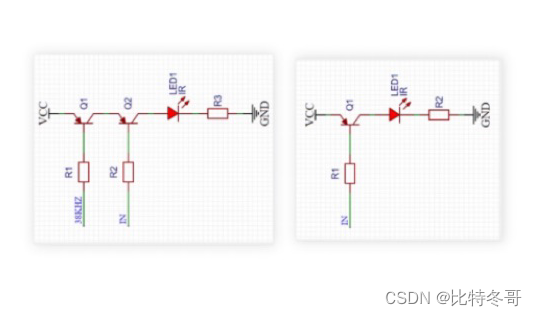
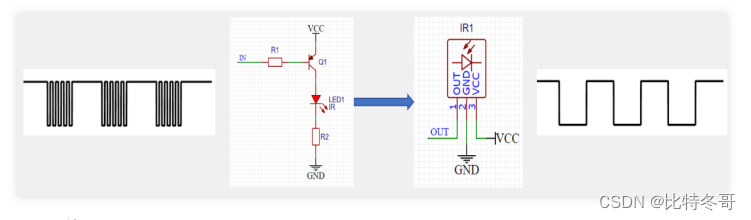
红外发射功能主要由红外发射管来实现,红外发射管在外观上和透明的LED发光二极管极为相似,其驱动和控制方式也一致。在使用单片机控制发射管时,一般使用三极管来驱动,NPN三极管和PNP三极管都可以实现。PNP三极管的基极通过电阻接单片机的GPIO口,发射管通过限流电阻接在PNP三极管的发射极上。当单片机的GPIO输出高电平时PNP三极管处于截止状态红外发射管不工作;当GPIO输出低电平时PNP三极管导通发射管工作,发出肉眼不可见的红外线,被接收管接收到。
具体电路有以下两种:
2.2 红外接收
红外接收管在外观上类似为黑色LED发光二极管,在没有接收到红外信号时,接收管不导通,三极管不导通,单片机接收到持续的高电平;当接收管接收到红外信号时,单片机接收到低电平。当遥控器的按键被按下时,按键对应的编码脉冲就会被单片机所接收到,单片机解析该脉冲,就能知道遥控器上是哪个按键被按下,从而实现用户的操作。但是,黑色的红外接收管抗干扰能力比较低,在设计电路的时候一般不选用,而是选用专用的红外接收头,最常用的型号为HS0038。而且,其红外接收电路简单,抗干扰能力强。

具体电路图:
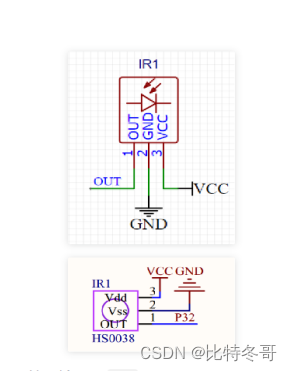
接收头会对接收到的红外光进行一定的过滤工作,然后输出到P32引脚上。
3. 红外调制
红外遥控发射数据时采用调制的方式,即把数据和一定频率的载波进行“与”操作,这样可以提高发射效率和降低电源功耗。
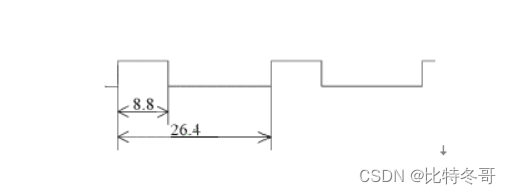
调制载波频率一般在30khz到60khz之间,大多数使用的是38kHz,占空比1/3的方波,如下图(载波波形)是由发射端所使用的455kHz晶振决定的。在发射端要对晶振进行整数分频,分频系数一般取12,所以455kHz÷12≈37.9 kHz≈38kHz。
基本发送与接收
红外LED的三种发送状态下接收头的输出:
①空闲状态:红外LED不亮,接收头输出高电平;
②发送低电平:红外LED以38KHz频率闪烁发光,接收头输出低电平;
③发送高电平:红外LED不亮,接收头输出高电平。
例如:
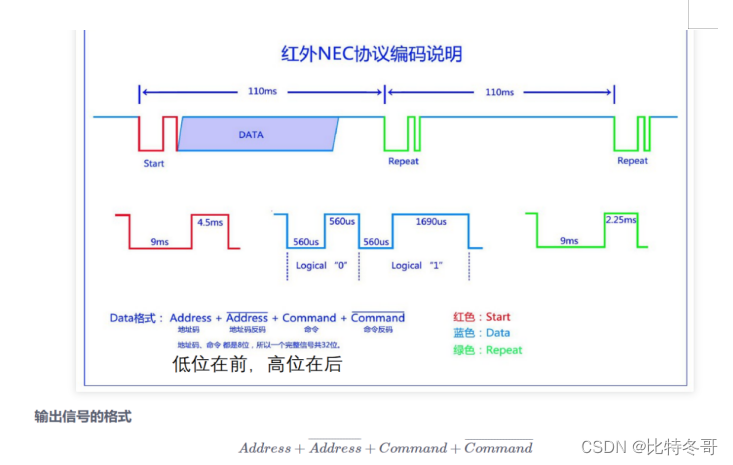
每个部分1个字节(8位),而第一和第二,第三和第四个部分互为反码是为了进行数据的校验信号的三种情况。
接收到的信号分为以下三种情况:
① 信息头,图中的红色信号,提示将要发送信号
② 信息体,图中的蓝色信号,真正需要传输的内容
③ 重复信号,图中的绿色信号,代表前面发送的内容重复发送
二、中断系统
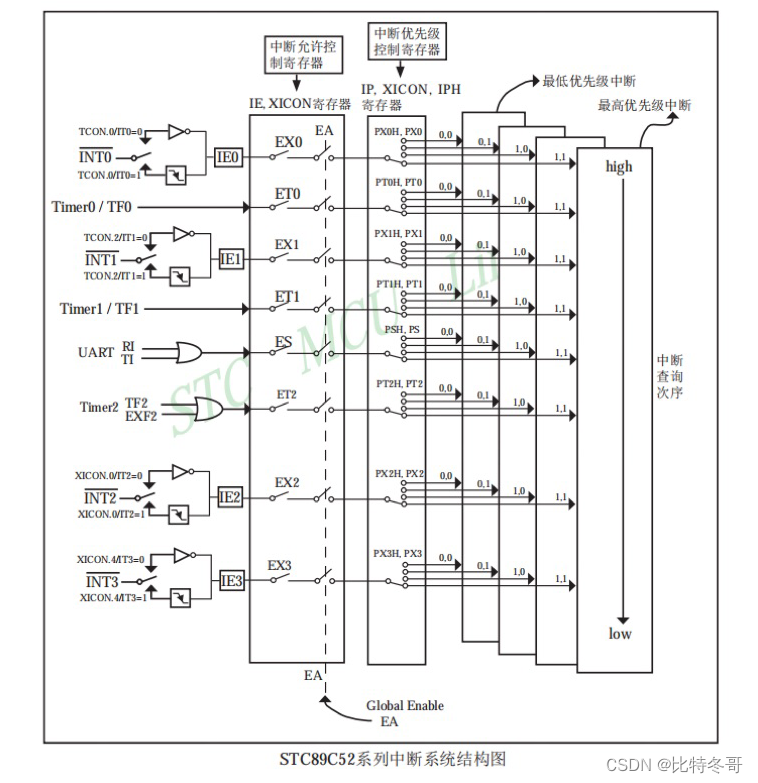
中断系统是为使CPU具有对外界紧急事件的实时处理能力而设置的。
当中央处理机CPU正在处理某件事的时候外界发生了紧急事件请求,要求CPU暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。实现这种功能的部件称为中断系统,请示CPU中断的请求源称为中段源。
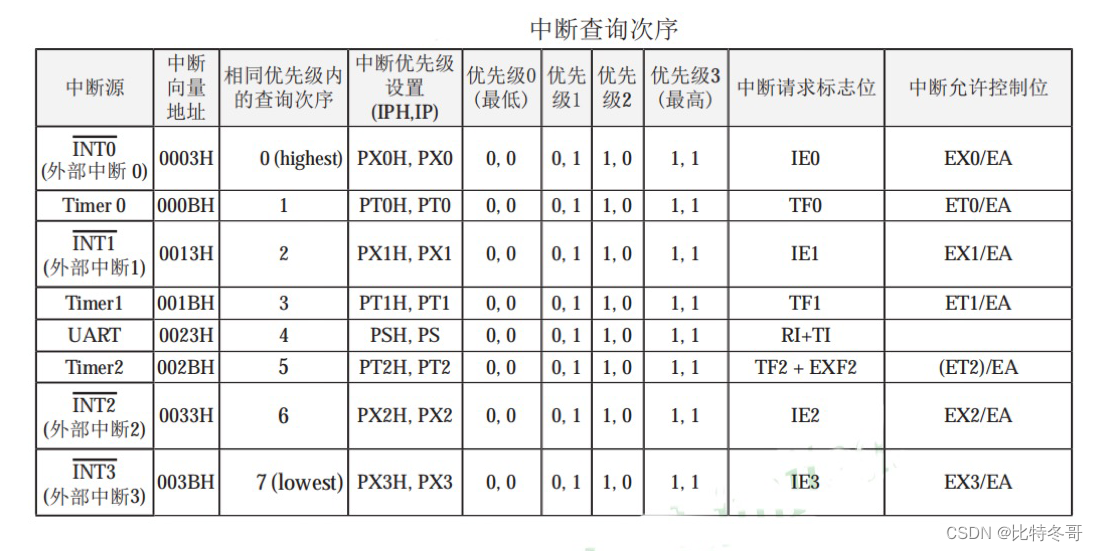
STC89C52系列单片机的各个中断查询次序如下表所示:
STC89C52系列单片机的中断系统结构示意图如下图所示:
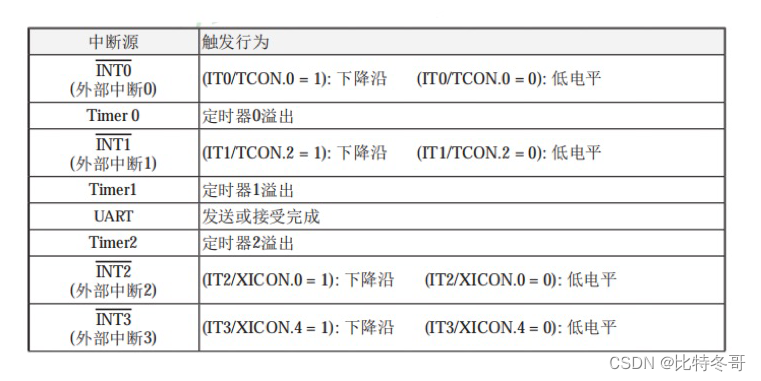
STC89C51RC系列单片机各个中断触发行为总结如下表所示:
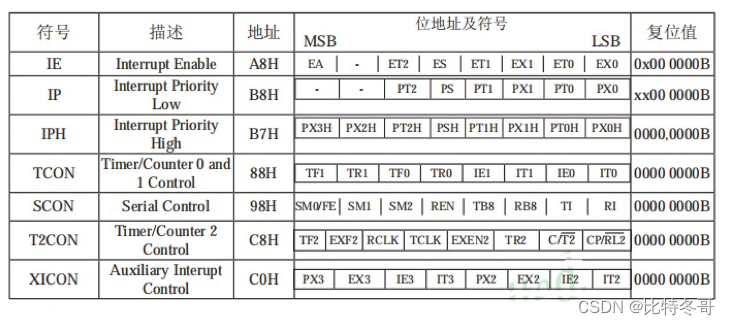
STC89C52系列单片机中断相关的所有寄存器如下表所示:
本节我主要对外部中断0和定时器0进行简单的介绍与应用
1. 外部中断0 与 定时器中断0 简介
外部中断0(INT0)既可低电平触发,也下降沿触发。请求中断的标志位是位于寄存器TCON中的IE0 / TCON.1。当外部中断服务程序被响应后,中断请求标志位IE0会自动被清0。TCON寄存器中的IT0/TCON.0决定了外部中断0是低电平触发方式还是下降沿触发方式。如果IT0=0,那么系统在INT0脚探测到低电平后可产生外部中断。如果IT0=1,那么系统在INT0脚探测下降沿后可产生外部中断。外部中断0(INT0)还可以用于将单片机从掉电模式唤醒。
定时器0中断请求标志位是TF0。当定时器寄存器TH0/TL0溢出时,溢出标志位TF0会被置位,定时器中断发生。当单片机转去执行该定时器中断时,定时器的溢出标志位TF0会被硬件清除。
2. 相关寄存器介绍
-
IE 中断允许控制寄存器

说明:
EA :全局中断允许位,当此位是1时中断可用
ET2:定时器/计数器2中断允许位
ES :串口中断允许位
ET1:定时器/计数器1中断允许位
EX1:外部中断1允许位
ET0:定时器/计数器0中断允许位
EX0:外部中断0允许位 -
TCON 控制寄存器

说明:
TF1 :定时器1溢出标志位
TR1 :定时器1运行控制位
TF0 :定时器0溢出标志位
TR0: 定时器0运行控制位
IE1 :外部中断1请求标志 IE1=1则外部中断1在向CPU请求中断,当CPU响应中断时硬件清0。一般不用手动设置。
IT1 :外部中断1触发方式选择位 该位为0时INT1引脚上的低电平信号可触发外部中断1。该位为1时INT1引脚上的负跳变信号可触发外部中断1。
IE0 :外部中断0请求标志 IE0=1则外部中断0在向CPU请求中断,当CPU响应中断时硬件清0。一般不用手动设置。
IT0 :外部中断0触发方式选择位 该位为0时INT0引脚上的低电平信号可触发外部中断1。该位为1时INT1引脚上的负跳变信号可触发外部中断1。 -
TMOD寄存器

说明:
GATE :定时操作开关控制位,当GATE=1时,INT0或INT1引脚为高电平,同时TCON中的TR0或TR1控制位为1时,计时/计数器0或1才开始工作。若GATE=0,则只要将TR0或TR1控制位设为1,计时/计数器0或1就开始工作。
C/T :定时器或计数器功能的选择位。C/T=1为计数器,通过外部引脚T0或T1输入计数脉冲。C/T=0时为定时器,由内部系统时钟提供计时工作脉冲。
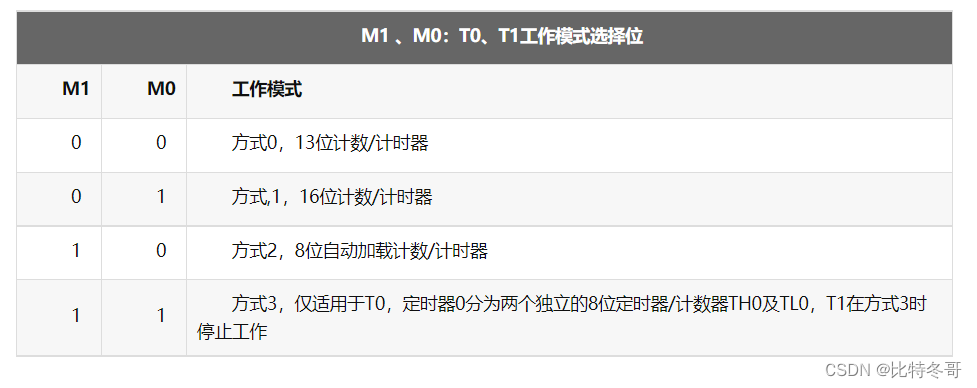
M1 、M0:T0、T1工作模式选择位
三、代码实现
本文利用的是模块化编程
代码如下(示例):
1.延迟模块
delay.c
void delay(unsigned int xms)
{unsigned char i, j;while(xms--){i = 2;j = 239;do{while (--j);} while (--i);}
}delay.h
#ifndef ___delay_H__
#define ___delay_H__
void delay(unsigned int xms);#endif
2. 定时器模块
2.1 定时器0
Time0.c
#include <reg52.h>void Timer0_Init(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时
}void Timer0_SetCounter(unsigned int Value)
{TH0=Value/256;TL0=Value%256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0<<8)|TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0=Flag;
}Time0.h
#ifndef __TIMER0_H__
#define __TIMER0_H__void Timer0_Init(void);
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter(void);
void Timer0_Run(unsigned char Flag);#endif2.2 定时器1
time1.c
#include<reg52.h>void Timer1Init() //100微秒 @11.0592MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL1 = 0xA4; //设置定时初值TH1 = 0xFF; //设置定时初值TF1 = 0; //清除TF0标志TR1 = 1; //定时器0开始计时ET1=1;EA=1;PT1=0;}
time1.h
#ifndef ___time1_H__
#define ___time1_H__
void Timer1Init();#endif
3. 数码管模块
smg.c
#include<reg52.h>
#include "delay.h"
#define led P0
sbit P24=P2^4;
sbit P23=P2^3;
sbit P22=P2^2;//数码管段码表
unsigned char NixieTable[]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};void Nixie(unsigned char Location,Number)
{switch(Location) //位码输出{case 1:P24=1;P23=1;P22=1;break;case 2:P24=1;P23=1;P22=0;break;case 3:P24=1;P23=0;P22=1;break;case 4:P24=1;P23=0;P22=0;break;case 5:P24=0;P23=1;P22=1;break;case 6:P24=0;P23=1;P22=0;break;case 7:P24=0;P23=0;P22=1;break;case 8:P24=0;P23=0;P22=0;break;}P0=NixieTable[Number]; //段码输出delay(1); //显示一段时间led=0x00; //段码清0,消影
}
smg.h
#ifndef __NIXIE_H__
#define __NIXIE_H__void Nixie(unsigned char Location,Number);#endif4. 独立按键模块
key.c
#include<reg52.h>
#include "delay.h"sbit P30=P3^0;
sbit P31=P3^1;
sbit P32=P3^2;
sbit P33=P3^3;unsigned char key()
{unsigned char KeyNumber=0;if(P31==0){delay(20);while(P31==0);delay(20);KeyNumber=1;}if(P30==0){delay(20);while(P30==0);delay(20);KeyNumber=2;}if(P32==0){delay(20);while(P32==0);delay(20);KeyNumber=3;}if(P33==0){delay(20);while(P33==0);delay(20);KeyNumber=4;}return KeyNumber;
}key.h
#ifndef ___key_H__
#define ___key_H__unsigned char key();#endif
5. 外部中断0模块
lnt0.c
#include <reg52.h>void Int0_Init(void)
{IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}
lnt0.h
#ifndef __INT0_H__
#define __INT0_H__void Int0_Init(void);#endif
6. 红外遥控模块
IR.c
#include <reg52.h>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];
unsigned char IR_pData;unsigned char IR_DataFlag;
unsigned char IR_RepeatFlag;
unsigned char IR_Address;
unsigned char IR_Command;void IR_Init(void) //红外遥控初始化
{Timer0_Init();Int0_Init();
}/*** @brief //红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}IR.h
#ifndef __IR_H__
#define __IR_H__
//遥控键值宏定义
#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4Avoid IR_Init(void);
unsigned char IR_GetDataFlag(void);
unsigned char IR_GetRepeatFlag(void);
unsigned char IR_GetAddress(void);
unsigned char IR_GetCommand(void);#endif7. 主函数模块
car.c
#include<reg52.h>
#include"delay.h"
#include"smg.h"
#include"key.h"
#include"time0.h"
#include"IR.h"sbit p17=P1^7; //两个电机
sbit p16=P1^6;
sbit p15=P1^5;
sbit p14=P1^4;unsigned int t,Speed,Command;
unsigned char Compare;
int main()
{ IR_Init();Timer1Init();while(1){ if(IR_GetDataFlag()) //如果收到数据帧{Command=IR_GetCommand(); //获取遥控器命令码if(Command==IR_0){Speed=0;} //根据遥控器命令码设置速度if(Command==IR_1){Speed=1;}if(Command==IR_2){Speed=2;}if(Command==IR_3){Speed=3;}if(Speed==0){Compare=0;} //速度输出if(Speed==1){Compare=30;}if(Speed==2){Compare=70;}if(Speed==3){Compare=100;}}Nixie(7,Speed); //数码管显示速度// p17 = 0; //左轮正转
// p16 = 1;
// p17 = 1; //反转
// p16 = 0;
// p17 = 0; //停止
// p16 = 0;
// p15 = 1; //右轮正转
// p14 = 0;
// p15 = 0; //反转
// p14 = 1;
// p15 = 0; //停止
// p14 = 0;}}void Timer0() interrupt 3
{static unsigned int i;TH1=0xff; TL1=0xa4; i++;i%=100;if(i<Compare){p17 = 1; //反转 p16 = 0; p15 = 0; //反转p14 = 1;}else{p17 = 0; //停止p16 = 0;p15 = 0; p14 = 0;}
}总结
本节是以STC89C52单片机为CPU,通过一些外围电路和软件编程实现小车红外遥控调速的功能。整个设计过程中最大的特点是利用简单的理论原理将红外遥控模块、L298N驱动模块、51单片机这三个模块有效的结合起来,利用红外遥控原理与pwm调节占空比的简单结合实现对小车红外遥控调速奠定编程理论基础,提高了效率,降低了编程的复杂度,具有很强的研究的意义,智能化的发展促使了智能小车往功能更加强大的方向发展。